| | |
 | Schraubtec-Premiere in Polen, eine Pressemitteilung
|
|
Autor
|
Thema: Material Greiferbacken (5579 mal gelesen)
|
DelphiFG
Mitglied
Automatisierungstechniker

   Beiträge: 116
Registriert: 07.01.2013
|

 erstellt am: 02. Jul. 2013 11:06
erstellt am: 02. Jul. 2013 11:06  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
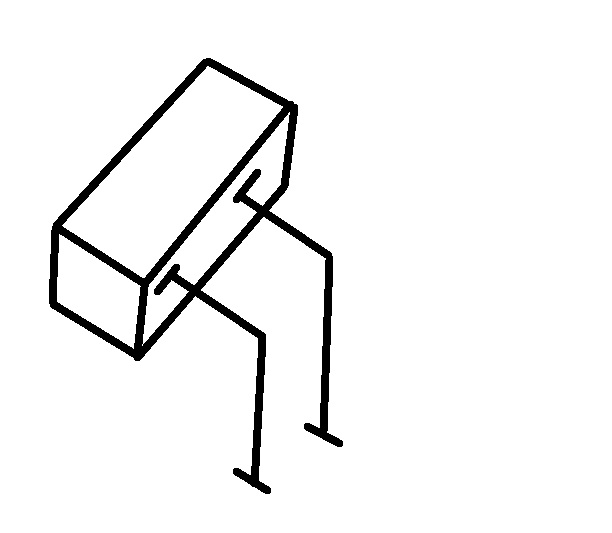
Hallo, ich bin auf der suche nach einem geeigneten Material für Greiferbacken. Im Normalfall würde ich zu Standartstahl tendieren. Bei der jetzigen Anforderung ist allerdings zu bedenken, das die Finger jeweils 30cm lang, 15x15mm und eine 90° Winkelung besitzen, die ebenfalls noch einmal 10cm und 15x15mm sind. Im Anhang mal ne kleine Skizze... Ich benötige ein Material, welches nicht sehr empfindlich auf Wärme reagiert und doch eine gute Festigkeit aufweist. Was könnte man da nehmen?
wäre ein Einsatzstahl besser oder würde ein Werkzeugstahl besser kommen? oder Oberflächen nitrieren? Mfg Matthias
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Andy-UP
Moderator
Projektingenieur
    

Beiträge: 2572
Registriert: 27.10.2003 Teilzeitrentner
Inv./Vault Pro 2026
|
erstellt am: 02. Jul. 2013 11:39 <-- editieren / zitieren --> Unities abgeben: Nur für DelphiFG 
|
ThoMay
Ehrenmitglied V.I.P. h.c.
Konstrukteur

Beiträge: 5260
Registriert: 15.04.2007 SWX 2019
Windows 10 x64
|
erstellt am: 02. Jul. 2013 12:23 <-- editieren / zitieren --> Unities abgeben: Nur für DelphiFG
|
Roland Schröder
Ehrenmitglied V.I.P. h.c.
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen

Beiträge: 13772
Registriert: 02.04.2004 Entwicklung von Spezialmaschinen und Mechatronik
Autodesk Inventor
|
erstellt am: 02. Jul. 2013 12:52 <-- editieren / zitieren --> Unities abgeben: Nur für DelphiFG
|
DelphiFG
Mitglied
Automatisierungstechniker
Beiträge: 116
Registriert: 07.01.2013
|
erstellt am: 02. Jul. 2013 13:29 <-- editieren / zitieren --> Unities abgeben:
die Kräfte dürften bei der entsprechenden Fingerlänge irgendwo bei 300-500 N liegen. Genauerer Angaben sind aufgrund der doch wesentlich überhöhten Fingerlänge nicht zu machen. Der 90° Winkel muss sein. Die Teile, welche gegriffen werden, sind mit ca 400°C doch recht warm. In der Hochtemperaturversion des greifers dürfen nur 130°C einwirken. Da die wärme ja nach oben strahlt, bleibt mir nichts, als den Greifer aus der Zone zu bekommen.
Ein Thermischer Schutz für den Greifer fällt aus anderen Gründen leider raus. Zykluszeit? der Greifer, und damit auch die Finger, haben pro Minute 1 Greifzyklus zu durchlaufen. Dabei kommt Anfangs ein Temp wert von 30°C zu 500°C und wieder runter zu 100°C und loslassen... Mfg Matthias Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
DelphiFG
Mitglied
Automatisierungstechniker
Beiträge: 116
Registriert: 07.01.2013
|
erstellt am: 02. Jul. 2013 13:30 <-- editieren / zitieren --> Unities abgeben:
|
Andy-UP
Moderator
Projektingenieur
Beiträge: 2572
Registriert: 27.10.2003 Teilzeitrentner
Inv./Vault Pro 2026
|
erstellt am: 02. Jul. 2013 14:45 <-- editieren / zitieren --> Unities abgeben: Nur für DelphiFG
Also laut Schunk-Katalog geht die von dir vorgesehene Greifer-Auskragung deutlich über die Werte die in dem Diagramm dafür angezeigt werden. Eventuell solltest Du einen anderen Greifer vorsehen. Ansonsten würde ich für die Greifer rostfreien Stahl vorschlagen wegen der geringeren Wärmeleitfähigkeit und vielleicht kann man ja die Kontaktzone mit wärmebeständigem oder feuerfest Material verkleiden. Andreas Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
DelphiFG
Mitglied
Automatisierungstechniker
Beiträge: 116
Registriert: 07.01.2013
|
erstellt am: 02. Jul. 2013 15:24 <-- editieren / zitieren --> Unities abgeben:
Jup, ist wesentlich über der Kennlinie. Hab noch nen Dreher drin gehabt: Es ist nicht der PGN Plus 100, sondern der 125... Macht nur den Unterschied, das die max. Fingerlänge bei 170mm liegt. Hatte heute die Firma Schunk hier im Hause und hab mit denen über die Problematik geredet. Da das Werkstückgewicht bei weitem nicht den Greifer an seine Grenzen bringen würde, könnte man die verlängerten Finger riskieren. Materialsparendes Konstruieren der Finger dürfte noch eine ordentliche Gewichtsreduzierung einherbringen, sodass die 90° Winkellage auch kein Problem mehr darstellen würde.
Größerer Greifer mit wesentlich längeren Fingern hat dann aber am Roboter bzw in der Anlage keinen Platz mehr. Mir schwebt inzwischen ein Material in Richtung 1.7131 vor. Müsste doch eigentlich passen. Oder? Übrigens, der Tip mit den Matten find ich richtig gut. Dürfte als Thermischer Schutz ganz gut sein. Mfg Matthias Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
tvd
Mitglied
Konstrukteur
Beiträge: 960
Registriert: 15.09.2005 Betriebssystem: Windows XP
CAD System: Wildfire 4.0
|
erstellt am: 03. Jul. 2013 13:09 <-- editieren / zitieren --> Unities abgeben: Nur für DelphiFG
Zitat:
Original erstellt von DelphiFG:
Hatte heute die Firma Schunk hier im Hause und hab mit denen über die Problematik geredet. Da das Werkstückgewicht bei weitem nicht den Greifer an seine Grenzen bringen würde, könnte man die verlängerten Finger riskieren.
Lass Dir das von Schunk schriftlich geben, ansonsten trägst Du bei Beschädigung des Greifers das angesprochene Risiko 
Der Greifer ist nicht dafür ausgelegt, überlange Backen aufgeschraubt zu bekommen die lt. Spezifikation nicht zulässig sind. Das Werkstückgewicht spielt da eine untergeordnete Rolle. Lediglich durch das runterdrehen des Druckes kann dem Ganzen entgegen gewirkt werden... ------------------
 Auch der richtige Weg kann in die falsche Richtung führen... Auch der richtige Weg kann in die falsche Richtung führen... Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Wyoming
Ehrenmitglied
Konstrukteur
Beiträge: 1874
Registriert: 02.02.2009
|
erstellt am: 03. Jul. 2013 13:44 <-- editieren / zitieren --> Unities abgeben: Nur für DelphiFG
Oder man setzt parallel zum Greifer eine Linearführung ein, welche das Moment aufnehmen kann. Der Greifer bewegt dann lediglich die Schlitten an denen die Arme befestigt sind. Kostet natürlich wieder mehr. Aber spezial ist immer teuer. Gruß Peter Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
kurzpa
Mitglied
Selbständiger Konstrukteur / Lehrer für technische Zeichner/Detailkonstrukteure
Beiträge: 126
Registriert: 17.10.2010 FujitsuSiemens Celsius H920
Win7+Solid Edge ST2/ST3/ST4
AUTODESK Produkt Design Suite
MathCAD15+Prime2.0
|
erstellt am: 03. Jul. 2013 19:36 <-- editieren / zitieren --> Unities abgeben: Nur für DelphiFG
hallo matthias! also mit einem einsatzstahl, 16MnCr5, 1.7131 liegst du hier weit daneben. da wirst du nicht sehr lange freude haben bei den temperaturen!
nebenbei benötigst du ja auch eine entsprechende festigkeit, oder irre ich mich? hatte vor kurzem ein ähnliches problem zu stemmen, dabei ging es darum ein werkstück, ~1200kg aus dem stoßofen zur entzunderung und anschließend zur presse zu transportieren. der verwendete Stahl bei dem griffstück, welcher direkten kontakt hatte, war ein hochwarmfester der 1.25 gruppe, hier 1.2547, 45WCrV7-7.
temperturkurven bei uns war etwa 250°C durchschnitt bei spitzen von ~350°C.
gekühlt haben wir mit luft, da wir sowieso vor jedem griff reinigen mussten. sehr genial, die hohe grundfestigkeit auch unbehandelt! das würde ich dir empfehlen... hier das datenblatt dazu: http://www.edelstahlwerk-ossenberg.de/fileadmin/PDF/Warmarbeit_PDF/45wcrv77.pdf lg
Patrick
------------------
Es gibt keine dummen Fragen, nur Dumme die nicht fragen! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ChrisLfd
Mitglied
Konstrukteur
Beiträge: 8
Registriert: 20.06.2013 Pro/ENGINEER Wildfire 4.0
|
erstellt am: 08. Jul. 2013 18:56 <-- editieren / zitieren --> Unities abgeben: Nur für DelphiFG
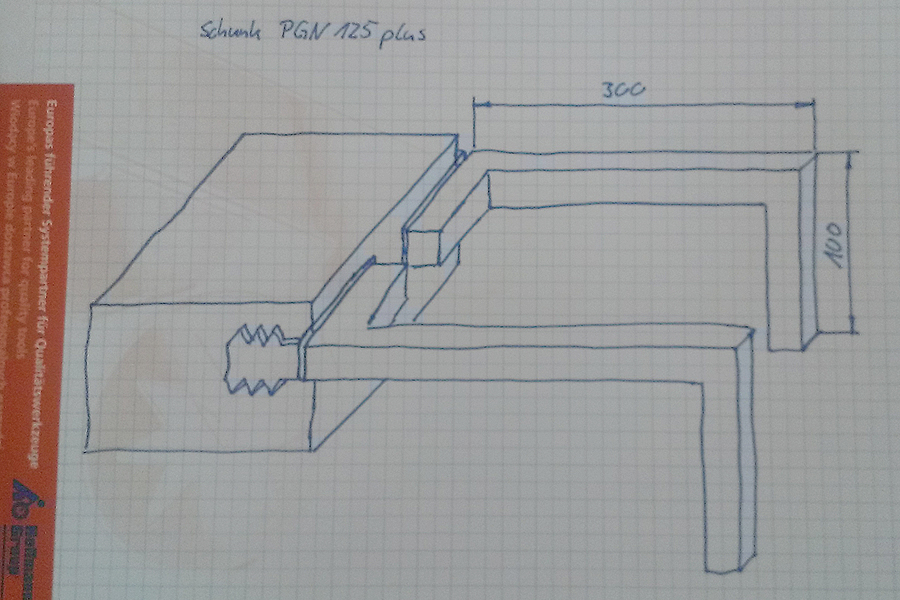
Hallo Matthias, habe deine Skizze mal etwas genauer dargestellt.
Hoffe ich habe das so richtig interpretiert? Wir haben diese Schunk PGN Greifer sehr viel im Einsatz
und als Werkstoff für die Greiferfinger nutzen wir 1.7131
aber natürlich nicht mit so extrem langen Fingern
und auch nicht bei solchen Temperaturen. Da wirst du definitiv starke Abzüge bei der Greifkraft machen müssen.
Als Stahl solltest du dann wohl eher einen Hochwarmfesten Stahl nehmen.
Sonst verziehen sich die Greiferfinger mit der Zeit und das wars mit
der Positioniergenauigkeit des Roboters. Gruß Chris Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de