| | |
 | 100 Prozent sichere Schraubenkopfauflage , ein Fachartikel
|
|
Autor
|
Thema: Kniehebel nach d`Alembert freischneiden (12182 mal gelesen)
|
makont
Mitglied
   Beiträge: 7
Registriert: 02.03.2012
|

 erstellt am: 30. Mrz. 2012 12:25
erstellt am: 30. Mrz. 2012 12:25  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
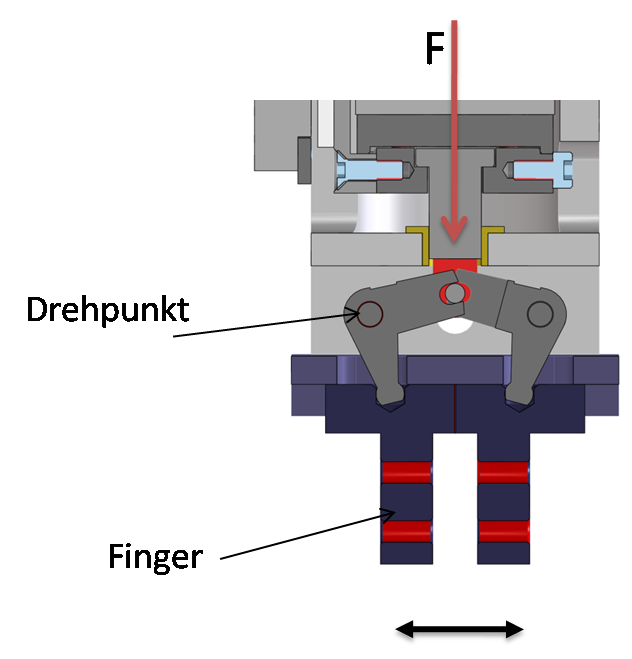
Guten Tag, habe folgende Situation, ein Kraft wirkt auf die Kniehebel Kinematik (siehe Grafik). Kraft und Masse sind bekannt, jetzt möchte ich die Knieheble nach dŽAlembert freischneiden um dann die Bewegungsgleichung auf zustellen um die beschleunigung der Finger zubestimmen.
Leider weis ich nicht sorecht wie ich anfangen soll, bzw welche Kinematischenbezieungen ich beachten muss. Grüße makont Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater

Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 31. Mrz. 2012 11:53 <-- editieren / zitieren --> Unities abgeben: Nur für makont 
Hi Makont. Schau mal hier: http://de.wikipedia.org/wiki/Virtuelle_Arbeit Da ist genau dein Beispiel drin. Ok, nicht mit der Translation der Backen am ende, aber das dürfte über Kräftezerlegung ja dann kein großes Problem darstellen. Letztendlich ists ja nur die Anwendung des Hebelgesetzes. Oder sehe ich das zu einfach?? Zitat: [...F1 x a1 = F2 x a2...] ------------------
gruß, Tom  [Diese Nachricht wurde von thomasacro am 31. Mrz. 2012 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
eberhard
Ehrenmitglied V.I.P. h.c.
Konstrukteur

Beiträge: 2072
Registriert: 21.06.2002 MDT 5 bis MDT 2008
Inventor Pro 2012
SWX 2011 mit RWX 7
Proe WF2, WF4
DesignSpace 12
Dell M6400 3GHz 8GB 2x250GB
Dell M70 2,13GHz 2GB
Dell 360 P4 2,8Ghz 2GB FX500
NoName P3 1GHz 512MB
|
erstellt am: 31. Mrz. 2012 15:03 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Das ist kein Kniehebel, sondern bloss eine Umlenkung der senkrechten Antriebskraft in den waagerechten Backenhub über die Winkelhebel. Über Hebelgesetze und Momentengleichgewicht lassen sich die Kräfte ermitteln. ------------------
gruss eberhard Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
makont
Mitglied
Beiträge: 7
Registriert: 02.03.2012
|
erstellt am: 01. Apr. 2012 15:51 <-- editieren / zitieren --> Unities abgeben:
|
alex
Mitglied
Produktentwicklung / Produktmanagement / Dipl.-Ing. (FH)
Beiträge: 789
Registriert: 25.07.2000 ME10 8.70G
I-deas 12 NX
NX 6 / NX 7.5 mit Teamcenter 8
Inventor 10/2010/2011/
2013/2014/2015/2019
ProE Wildfire 3
SolidWorks 2019/2021
|
erstellt am: 01. Apr. 2012 17:47 <-- editieren / zitieren --> Unities abgeben: Nur für makont
|
makont
Mitglied
Beiträge: 7
Registriert: 02.03.2012
|
erstellt am: 01. Apr. 2012 19:13 <-- editieren / zitieren --> Unities abgeben:
|
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 01. Apr. 2012 21:25 <-- editieren / zitieren --> Unities abgeben: Nur für makont
|
ulrix
Mitglied
Maschinenbauingenieur
Beiträge: 744
Registriert: 10.07.2007 Core 2 Duo 2,13 GHz / 2GB RAM
GeForce 7900 / 256 MB
Space Navigator
XP Pro SP2
AIS 2010
|
erstellt am: 02. Apr. 2012 10:13 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Zitat:
Original erstellt von eberhard:
Das ist kein Kniehebel
Da hat Eberhard ganz einfach recht. Die beiden oberen Hebelarme haben an Ihern Enden jeweils eine Gabel, in denen ein Bolzen gleitet. Ohne sauberes Freischneiden wird das nix. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Hohenöcker
Ehrenmitglied V.I.P. h.c.
Ingenieur

Beiträge: 2408
Registriert: 07.12.2005 Inventor 2023
Ich mag beide Arten von Musik:
Country und Western!
S-Fanclub
|
erstellt am: 02. Apr. 2012 11:03 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Stimmt ja. Der Angriffspunkt von F ist vom Drehpunkt in waagrechter Richtung immer gleich weit entfernt. Der untere Angriffspunkt wandert etwas in vertikaler Richtung; da geht der Winkel ein, aber nur mit dem Cosinus (in erster Näherung zu vernachlässigen). ------------------
Gert Dieter  Kompliziert ist einfach. Einfach ist kompliziert. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
adamsh
Mitglied
Forschung und Entwicklung
Beiträge: 842
Registriert: 27.05.2006 Halbwegs Systemadministration und -entwurf....
|
 erstellt am: 02. Apr. 2012 12:05 <-- editieren / zitieren --> Unities abgeben: Nur für makont
erstellt am: 02. Apr. 2012 12:05 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Zitat:
Original erstellt von makont:
Guten Tag, habe folgende Situation, ein Kraft wirkt auf die Kniehebel Kinematik (siehe Grafik). .... Leider weis ich nicht sorecht wie ich anfangen soll, bzw welche Kinematischenbezieungen ich beachten muss. Grüße makont
Ich auch nicht, denn da sind zu viele Fehler drinnen.
- Diese Kinematik ist schlichtweg verboten. Bewegung des Hebels unverträglich mit Führung der Finger.
- Welche Bewegung führen denn Deine Hebel aus? Welche Trägheit wirkt?
HA
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
eberhard
Ehrenmitglied V.I.P. h.c.
Konstrukteur
Beiträge: 2072
Registriert: 21.06.2002 MDT 5 bis MDT 2008
Inventor Pro 2012
SWX 2011 mit RWX 7
Proe WF2, WF4
DesignSpace 12
Dell M6400 3GHz 8GB 2x250GB
Dell M70 2,13GHz 2GB
Dell 360 P4 2,8Ghz 2GB FX500
NoName P3 1GHz 512MB
|
erstellt am: 02. Apr. 2012 13:50 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Zitat:
Original erstellt von adamsh:
Diese Kinematik ist schlichtweg verboten. Bewegung des Hebels unverträglich mit Führung der Finger.
Was soll an diesem Prinzip verboten sein? Die Darstellung ist im Detail nicht korrekt, aber das Prinzip gibt es so in der Praxis. ------------------
gruss eberhard Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Fyodor
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing.(FH) Maschinenbau

Beiträge: 2721
Registriert: 15.03.2005
|
erstellt am: 02. Apr. 2012 13:56 <-- editieren / zitieren --> Unities abgeben: Nur für makont
|
adamsh
Mitglied
Forschung und Entwicklung
Beiträge: 842
Registriert: 27.05.2006 Halbwegs Systemadministration und -entwurf....
|
erstellt am: 02. Apr. 2012 18:41 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Zitat:
Original erstellt von eberhard:
Was soll an diesem Prinzip verboten sein? Die Darstellung ist im Detail nicht korrekt, aber das Prinzip gibt es so in der Praxis.
Laut Zeichnung sind die Finger in x-Richtung geführt --- festgelegt ohne Spiel. Richtest Du die Kraft nach unten, dann klemmen deine Finger gegen die äußere Führung, richtest Du die Kraft nach oben, dann klemmen die Finger gegeneinander. Da über die Hebel Bewegungen in x-und y-Richtung gekoppelt sind, kannst Du deine Finger so nicht nach unten bewegen. Was denkst Du, weshalb die Durchbrüche für die Hebel relativ groß ausgespart worden sind? HA
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
eberhard
Ehrenmitglied V.I.P. h.c.
Konstrukteur
Beiträge: 2072
Registriert: 21.06.2002 MDT 5 bis MDT 2008
Inventor Pro 2012
SWX 2011 mit RWX 7
Proe WF2, WF4
DesignSpace 12
Dell M6400 3GHz 8GB 2x250GB
Dell M70 2,13GHz 2GB
Dell 360 P4 2,8Ghz 2GB FX500
NoName P3 1GHz 512MB
|
erstellt am: 02. Apr. 2012 21:14 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Funktionsprinzip: Senkrecht wirkende Antriebskraft (roter Pfeil) wirkt auf die beiden Winkelhebel. Der Bolzen kann Kraft nur
in senkrechter Richtung auf die Winkelhebel übertragen, da die Winkelhebel Langlöcher aufweisen.
Die Winkelhebel führen eine Schwenkbewegung um ihren gelagerten Drehpunkt aus. Das andere Ende der Winkelhebel
ist ballig ausgeführt und befindet sich den Aussparungen der Spannbacken. Die Spannbacken sind geführt und
können nur eine Bewegung in waagerechter Richtung ausführen. Bei der Schwenkbewegung der Winkelhebel
werden die Spannbacken waagerecht verschoben und das ballige Ende der Winkelhebel wälzt sich dabei in der
Aussparung der Spannbacken ab. Die senkrechte Bewegungskomponennte von dem balligen Winkelhebelende ist frei
und es ensteht kein Zwang. Das Prinzip ist Standard z.B bei sogenannten Kraftspannfuttern mit Winkelhebel. Guckst du hier Und wie gesagt, es geht um das Prinzip und nicht u eine vielleicht etwas ungenaue Darstellung der Grafik. ------------------
gruss eberhard Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ThoMay
Ehrenmitglied V.I.P. h.c.
Konstrukteur

Beiträge: 5260
Registriert: 15.04.2007 SWX 2019
Windows 10 x64
|
erstellt am: 03. Apr. 2012 06:22 <-- editieren / zitieren --> Unities abgeben: Nur für makont
|
adamsh
Mitglied
Forschung und Entwicklung
Beiträge: 842
Registriert: 27.05.2006 Halbwegs Systemadministration und -entwurf....
|
erstellt am: 03. Apr. 2012 09:03 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Zitat:
Original erstellt von eberhard:
Funktionsprinzip:Senkrecht wirkende Antriebskraft (roter Pfeil) wirkt auf die beiden Winkelhebel. Der Bolzen kann Kraft nur
in senkrechter Richtung auf die Winkelhebel übertragen, da die Winkelhebel Langlöcher aufweisen.
Die Winkelhebel führen eine Schwenkbewegung um ihren gelagerten Drehpunkt aus. Das andere Ende der Winkelhebel
ist ballig ausgeführt und befindet sich den Aussparungen der Spannbacken.
Da ist in X-Richtung nichts frei beweglich. Nach außen gibt es zwei Begrenzungen, nach innen klemmen die Finger gegenseitig....
Zitat:
Und wie gesagt, es geht um das Prinzip und nicht u eine vielleicht etwas ungenaue Darstellung der Grafik.
Die Darstellung ist auch nicht nur ungenau. Die äußeren Führungsleisten fallen nicht vom Himmel, das fehlende Arbeitsspiel der Finger gegeneinander ist offensichtlihc. HA
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
eberhard
Ehrenmitglied V.I.P. h.c.
Konstrukteur
Beiträge: 2072
Registriert: 21.06.2002 MDT 5 bis MDT 2008
Inventor Pro 2012
SWX 2011 mit RWX 7
Proe WF2, WF4
DesignSpace 12
Dell M6400 3GHz 8GB 2x250GB
Dell M70 2,13GHz 2GB
Dell 360 P4 2,8Ghz 2GB FX500
NoName P3 1GHz 512MB
|
erstellt am: 03. Apr. 2012 09:52 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Mein lieber Hans Adams, ich gebŽs auf  Da liegen schon grundlegend unterschiedliche Auffassungen vor wie man überhaupt so eine Grafik beurteilt. Beispiel:
Es gibt keine Angabe X oder Y in der Grafik. Wenn du selber schon X und Y erfindest, solltest du zunmindest definieren welche Richtungen damit gemeint sind.
Hast du Dir überhaupt den Link von Röhm angeschaut, aus dem ersichtlich ist, wie der Antrieb mit Winkelhebeln funzt. ------------------
gruss eberhard Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
adamsh
Mitglied
Forschung und Entwicklung
Beiträge: 842
Registriert: 27.05.2006 Halbwegs Systemadministration und -entwurf....
|
erstellt am: 06. Apr. 2012 11:18 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Zitat:
Original erstellt von eberhard:
Mein lieber Hans Adams,
ich gebŽs auf Da liegen schon grundlegend unterschiedliche Auffassungen vor wie man überhaupt so eine Grafik beurteilt.Beispiel:
Es gibt keine Angabe X oder Y in der Grafik. Wenn du selber schon X und Y erfindest, solltest du zunmindest definieren welche Richtungen damit gemeint sind.
Hast du Dir überhaupt den Link von Röhm angeschaut, aus dem ersichtlich ist, wie der Antrieb mit Winkelhebeln funzt.
...und jetzt erkläre mit bitte, wie sich die Finger nach unten (parallel zur Kraft F) bewegen sollen.
Welche komponenten der Struktur müssen mitbewegt werden? HA Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
eberhard
Ehrenmitglied V.I.P. h.c.
Konstrukteur
Beiträge: 2072
Registriert: 21.06.2002 MDT 5 bis MDT 2008
Inventor Pro 2012
SWX 2011 mit RWX 7
Proe WF2, WF4
DesignSpace 12
Dell M6400 3GHz 8GB 2x250GB
Dell M70 2,13GHz 2GB
Dell 360 P4 2,8Ghz 2GB FX500
NoName P3 1GHz 512MB
|
erstellt am: 06. Apr. 2012 12:00 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Wenn du mit Finger die dunkelblauen Teile mit roten Bohrungen meinst, die werden gar nicht nach unten bewegt. Sie werden nur in der waagerechten bewegt und spannen ein Teil. Im übrigen habe ich das weiter oben schon so beschrieben. Das was du als Finger bezeichnest, habe ich Spannbacken genannt. ------------------
gruss eberhard Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mtech3
Mitglied
Techniker
Beiträge: 121
Registriert: 18.11.2011
|
erstellt am: 09. Apr. 2012 10:27 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Hallo Eberhard, adamsh hat recht, durch die Drehbewegung macht der Winkelhebel (das ballige Ende) auch eine Bwegung nach unten bis er in senkrechter stellung ist; Die Sacklöcher müssen tiefer sein, sonst klemmt es; es kommt ein senkrechter Druck auf die finger. ausserdem ist das kein echter Kniehebel. mfg
Erich
[Diese Nachricht wurde von Mtech3 am 09. Apr. 2012 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
makont
Mitglied
Beiträge: 7
Registriert: 02.03.2012
|
erstellt am: 09. Apr. 2012 17:24 <-- editieren / zitieren --> Unities abgeben:
|
beetleshoe
Mitglied
Dipl.-Ing. Univ. Maschinenbau
Beiträge: 47
Registriert: 06.03.2012 Creo
NXNastran
|
erstellt am: 09. Apr. 2012 22:50 <-- editieren / zitieren --> Unities abgeben: Nur für makont
@makont, Mann, schau Dir das Bild an, übrigens, das Bild ist in Ordnung:
F1*L1 = F2*L2*cos(rho) (wobei rho=Winkel aus der Vertikalen)
L1 ist konstant weil der Angriff im "Langloch" stattfindet und beschreibt eine Gerade [s=s0+v*t-1/2*a*t²]
L2 ist NICHT konstant weil der zylindrisch Teil des unteren Hebelarms in der Ausfräsung auf- und ab-gehen kann, je nach Winkellage und dieser Punkt beschreibt einen Kreisbogen[phi=phi0+omega*t-1/2*alpha*t²].
Diese Geschichte heißt Hebelgestz, ist älter als die Steinzeit, hat mit d'Alembert erstmal nix zu tun und wird in der 6. Klasse Gymnasium (soweit ich mich erinnern kann) gelehrt. Bitte schau doch in Deine Schulbücher.
Jetzt, wenn die Statik bekannt ist, kannst Du das d'Alembert'sche Prinzip anwenden: Summe(Fi + Fti)=0. usw. ( einmal lieare und einmal Kreis-Bewegung) Einen schönen Abend und viel Spaß
beetleshoe Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
eberhard
Ehrenmitglied V.I.P. h.c.
Konstrukteur
Beiträge: 2072
Registriert: 21.06.2002 MDT 5 bis MDT 2008
Inventor Pro 2012
SWX 2011 mit RWX 7
Proe WF2, WF4
DesignSpace 12
Dell M6400 3GHz 8GB 2x250GB
Dell M70 2,13GHz 2GB
Dell 360 P4 2,8Ghz 2GB FX500
NoName P3 1GHz 512MB
|
erstellt am: 11. Apr. 2012 19:38 <-- editieren / zitieren --> Unities abgeben: Nur für makont
Zitat:
Original erstellt von Mtech3:
ausserdem ist das kein echter Kniehebel.[Diese Nachricht wurde von Mtech3 am 09. Apr. 2012 editiert.]
Erich,
schön das du das auch erkannt hast. Manchmal ist es nützlich zu lesen, was weiter oben in einem Fred bereits geschrieben wurde  ------------------
gruss eberhard Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de