| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für Creo |
|
Autor
|
Thema: Creo Mechanics Bewegungsrichtung (2398 mal gelesen)
|
haner13
Mitglied

   Beiträge: 120
Registriert: 20.05.2013 Creo Parametric 2.0 Student Edition
|

 erstellt am: 29. Dez. 2014 17:45
erstellt am: 29. Dez. 2014 17:45  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo, ich habe in Creo Parametric einen Portalroboter als Baugruppe zusammengbaut. Die Bewegungschsen sind über Schubgelenke definiert, sodass ich ihn in x-, y- und z-Achse bewegen kann über den Befehl "Komponenten ziehen". Über die Anwendung "Mechanics" habe ich nun jeweils ein Servomotor definiert, der sich mit einer bestimmten Geschwindigkeit bewegt.
Über die "Mechanism Analyse" möchte ich die Kinematik überprüfen. Zuerst soll sich nur die z-Achse nach oben bewegen, dann sollen sich nach und nach erst die anderen Achsen bewegen. Das habe ich über den Startzeitpunkt und Endzeitpunkt definiert. Mein Problem:
Leider bewegt sich aber z.B. die z-Achse nur nach oben, lässt sich also nur in eine Richtung vefahren. Sie soll sich aber später an einer anderen Ortsposition wieder absenken. Wie kann ich das einstellen? Vielen Dank
haner Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
BergMax
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. (FH)

Beiträge: 2346
Registriert: 23.08.2005
|
erstellt am: 30. Dez. 2014 07:12 <-- editieren / zitieren --> Unities abgeben: Nur für haner13 
Moin, du benötigst entweder für jede Richtung einen eigenen Motor (also zwei pro Achse) und die werden dann zu bestimmten Zeiten genutzt. Alternativ kann mann einen tabellengesteuerten Motor verwenden, über den das PRofil festgelegt wird. Dabei ist aber zu beachten, dass bei kinematischen/dynamischen Analysen die Tabellenpunkte nicht linear, sondern als Spline eingepasst/verbunden werden. ------------------
Beste Grüße
Max Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
haner13
Mitglied
Beiträge: 120
Registriert: 20.05.2013 Creo Parametric 2.0 Student Edition
|
erstellt am: 30. Dez. 2014 11:44 <-- editieren / zitieren --> Unities abgeben:
Hallo, danke habe es nun mit den zwei Servomotoren gemacht, die ich in unterschiedliche Richtungen definiert habe. hat gleich funktioniert. Jetzt taucht plötzlich aber ein neues Problem auf.
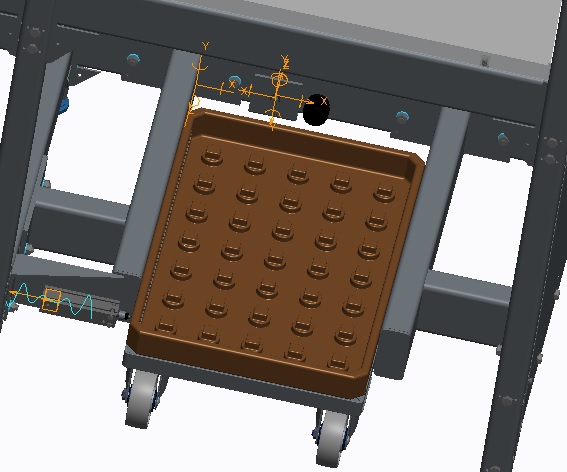
Wenn ich die Simulation starte verfährt plötlich ein anderes Bauteil einfach in eine andere Stellung, obwohl hier im Mechanic-Modus nicht einmal ein Servomotor oder anderes definiert ist.
Eigentlich sollte das Rollbrett hinten auf Anschlag stehen. Drücke ich nach der Simulation auf regenerieren macht er das auch, doch zu Beginn der Simulation fährt er in die Position die auf dem Bild zu erkennen ist, wo er eigentlich nie hinfahren soll.
Was kann das sein? Gruß
haner [Diese Nachricht wurde von haner13 am 30. Dez. 2014 editiert.] [Diese Nachricht wurde von haner13 am 30. Dez. 2014 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
BergMax
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. (FH)
Beiträge: 2346
Registriert: 23.08.2005
|
erstellt am: 30. Dez. 2014 11:57 <-- editieren / zitieren --> Unities abgeben: Nur für haner13
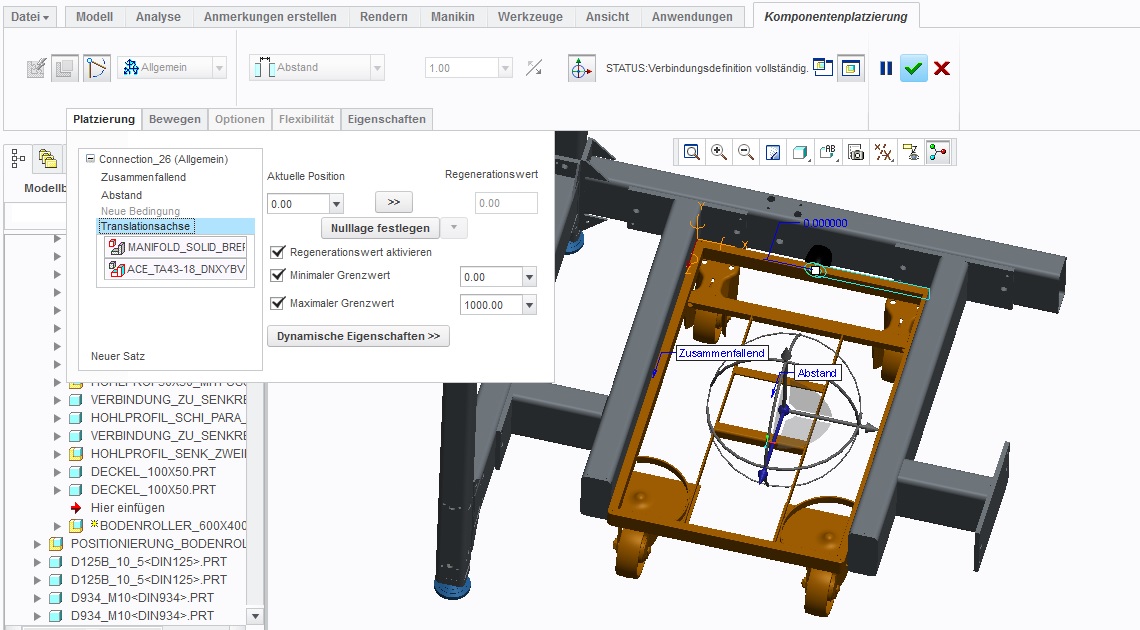
Moin, wenn er nach Regenerierung in die richtige Position springt, scheinst du einen Regenerierungswert gesetzt zu haben.
Benutzt du einen Schnappschuss für den Start? Der könnte falsch sein.
Du analysierst doch kinematisch oder? ------------------
Beste Grüße
Max Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
haner13
Mitglied
Beiträge: 120
Registriert: 20.05.2013 Creo Parametric 2.0 Student Edition
|
erstellt am: 30. Dez. 2014 12:11 <-- editieren / zitieren --> Unities abgeben:
|
haner13
Mitglied
Beiträge: 120
Registriert: 20.05.2013 Creo Parametric 2.0 Student Edition
|
 erstellt am: 30. Dez. 2014 13:34 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 30. Dez. 2014 13:34 <-- editieren / zitieren --> Unities abgeben:
|

 Foren auf CAD.de
Foren auf CAD.de



 |
|