| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für PTC CREO |
| | |
 | Effiziente Migration nach PTC Windchill: Software Factory stellt Migration Factory für komplexe Transformationsprojekte vor, eine Pressemitteilung
|
|
Autor
|
Thema: Drehmomentanalyse (484 mal gelesen)
|
beckenrandschwimmer
Mitglied
Konstrukteur auf Pro/E, CatiaV5 und ACAD2002/eM-Workplace 6.03 Unix/PC gelernt.Beruf: Werkzeugmacher

   Beiträge: 104
Registriert: 19.09.2002 Wenn es nötig ist schwimme ich auch weiter raus!
|

 erstellt am: 17. Nov. 2002 12:35
erstellt am: 17. Nov. 2002 12:35  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
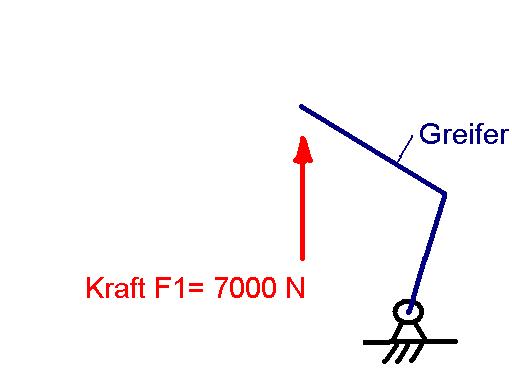
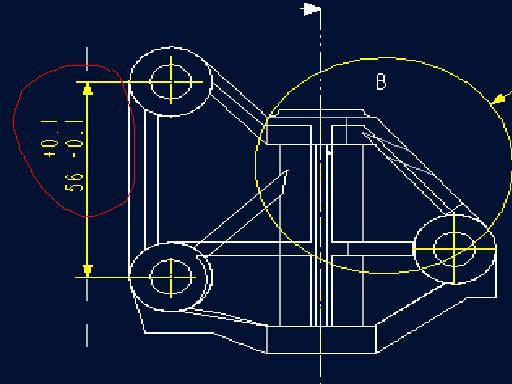
Hallo Gemeinde, ich weiß heute ist Sonntag, aber wie das so ist, wenn man sich was vorgenommen hat... Folgendes Problem : (Skizze im Anhang) Ich habe einen Greifer, der auf ein Drehgelenk ein Drehmoment ausübt. Nun möchte ich nicht lange in meinem Tabellenbuch rumblättern und mir die Kraftwirkung ausrechnen, denn dafür habe ich ja ein schlaues  CAD-Programm! Hat sich sowas schon mal einer von Euch über Analyse ausrechnen lassen? Naja und wo ich grad hier bin...wo kann ich direkt auf die Texthöhe der Plus-Minus Toleranz siehe Anhang (Bemassung.jpg) zugreifen. Über Eigenschaften ändert sich immer nur die gesammte Texthöhe der Bemassung. und...wie stelle ich dauerhaft ein, dass er mir bei einem Gewinde nicht immer den gesammten Anhang mit darstellt. Mir reicht zb. M6x25 völlig aus. Schönen Sonntag noch!
Gruß Dirk
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
os
Ehrenmitglied V.I.P. h.c.
Konstruktionsingenieur

Beiträge: 2458
Registriert: 16.09.2002 2001,WF,WF2...
|
 erstellt am: 17. Nov. 2002 13:21 <-- editieren / zitieren --> Unities abgeben: Nur für beckenrandschwimmer
erstellt am: 17. Nov. 2002 13:21 <-- editieren / zitieren --> Unities abgeben: Nur für beckenrandschwimmer 
Hallo Dirk Auf Frage 2 kann ich so aus dem Kopf antworten. Hatte einen Disput mit unserem Chef. Da wir alle Zeichnungen in A3 ausgeben, konnte er die Toleranzen nicht mehr lesen. Funktioniert in der *.dtl (Zeichnungsvoeinstellungsdatei) mit tol_text_height_factor. Standardmäßig steht der auf 0.6, d.h. 60% der Masszahlhöhe. Ich mußte ihn auf 1 stellen , für alle Brillenträger. An Frage 1 und 3 arbeite ich noch. Nur eins, die Kraft auf den Greifer sollte die nicht von oben nach unten kommen, sonst wärs ein Niederhalter? Noch eins, ist im Knick ein Gelenk? Hat zwar keinen Auswirkung auf das Drehmoment, wäre aber interessant zu wissen. Gruß und guten Apetit
Olaf  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
beckenrandschwimmer
Mitglied
Konstrukteur auf Pro/E, CatiaV5 und ACAD2002/eM-Workplace 6.03 Unix/PC gelernt.Beruf: Werkzeugmacher
Beiträge: 104
Registriert: 19.09.2002 Wenn es nötig ist schwimme ich auch weiter raus!
|
erstellt am: 17. Nov. 2002 15:32 <-- editieren / zitieren --> Unities abgeben:
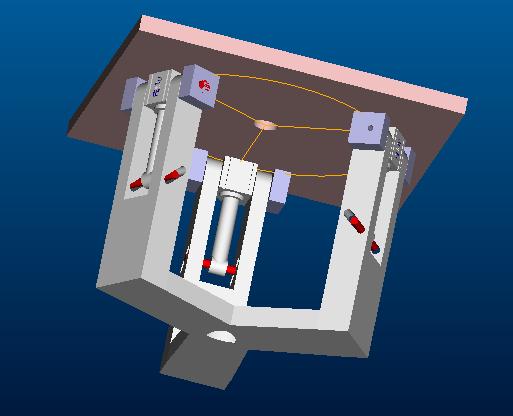
Hallo Olaf, vielen Dank das Du dich mit meiner Sache beschäftigst. Zum besseren Verständnis habe ich nochmal ein Bild angehängt. Die Greifer sind über eine Grundplatte mit einem Roboter verbunden. Die Greifer sollen ein Werkstück auf eine Welle ziehen. Beim draufziehen ensteht an der Greiferlagerung ein Drehmoment, welches durch die Kraft der Zylinder aufgefangen werden soll, damit sich die Greifer nicht öffnen. Dies ist zwar noch ein alter Stand, neuerdings werden die Greifer über ein in der Mitte befindliches Dreibackenfutter gesteuert, aber die Kraftrichtung ist immer noch die alte. Wie kann ich mir aber nun das Drehmoment an den Greiferdrehgelenken berechnen lassen? Gruß Dirk Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
os
Ehrenmitglied V.I.P. h.c.
Konstruktionsingenieur
Beiträge: 2458
Registriert: 16.09.2002 2001,WF,WF2...
|
erstellt am: 17. Nov. 2002 17:39 <-- editieren / zitieren --> Unities abgeben: Nur für beckenrandschwimmer
Hallo noch mal Hier die Sache mit den Gewinden. Erzeug dir eine *.hol Datei und setzte bei callout_format dein gewünschtes Gewindeausgabeformat ein. Setze die config option so, mit hole_parameter_file_path , das sie automatisch aufgerufen wird. (siehe Anhang) Zu der Sache mit dem Hebelarm, Ich würde die Sache ganz klassisch lösen mit Parameter und Beziehung. Mach dir ein Referenzmaß auf die Hebelarmlänge. Erzeug dir einen Parameter für die angreifende Kraft und berechne sie in einer Beziehung mit Drehmoment= Kraft*Hebelarm. Gibt vieleicht andere Lösungen, aber das scheint mir die einfachste zu sein. (Kommt drauf an was du später mit dem Drehmoment anfangen willst). Gruß und schönen Sonntag noch nach Kressbronn
Olaf
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
beckenrandschwimmer
Mitglied
Konstrukteur auf Pro/E, CatiaV5 und ACAD2002/eM-Workplace 6.03 Unix/PC gelernt.Beruf: Werkzeugmacher
Beiträge: 104
Registriert: 19.09.2002 Wenn es nötig ist schwimme ich auch weiter raus!
|
erstellt am: 17. Nov. 2002 18:56 <-- editieren / zitieren --> Unities abgeben:
|
ehlers
Mitglied
Ingenieur
Beiträge: 1432
Registriert: 05.11.2001 Pro/E 14-2001 WF1-5
|
erstellt am: 18. Nov. 2002 10:45 <-- editieren / zitieren --> Unities abgeben: Nur für beckenrandschwimmer
Das mit den Kräften und Momenten geht mit MDX. Die Lasten eingeben Messpunkte definieren und als Ausgabe gibts die Graphen und Pfeile in einer Animation. Statisch oder Dynamisch. Wie immer "ask your Sales-rep..." ------------------
Des Übels Wurzel ist der Schwachsinn, wobei die Wurzel des Schwachsinns nicht zu unterschätzen ist (Werner) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|