| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für NX |
| | |
 | Whats new in Designcenter Solid Edge 2026, ein Webinar am 04.11.2025
|
|
Autor
|
Thema: NX 7.5 Simple Simulation (13484 mal gelesen)
|
jts
Mitglied
Student

   Beiträge: 11
Registriert: 04.01.2011
|

 erstellt am: 04. Jan. 2011 14:42
erstellt am: 04. Jan. 2011 14:42  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
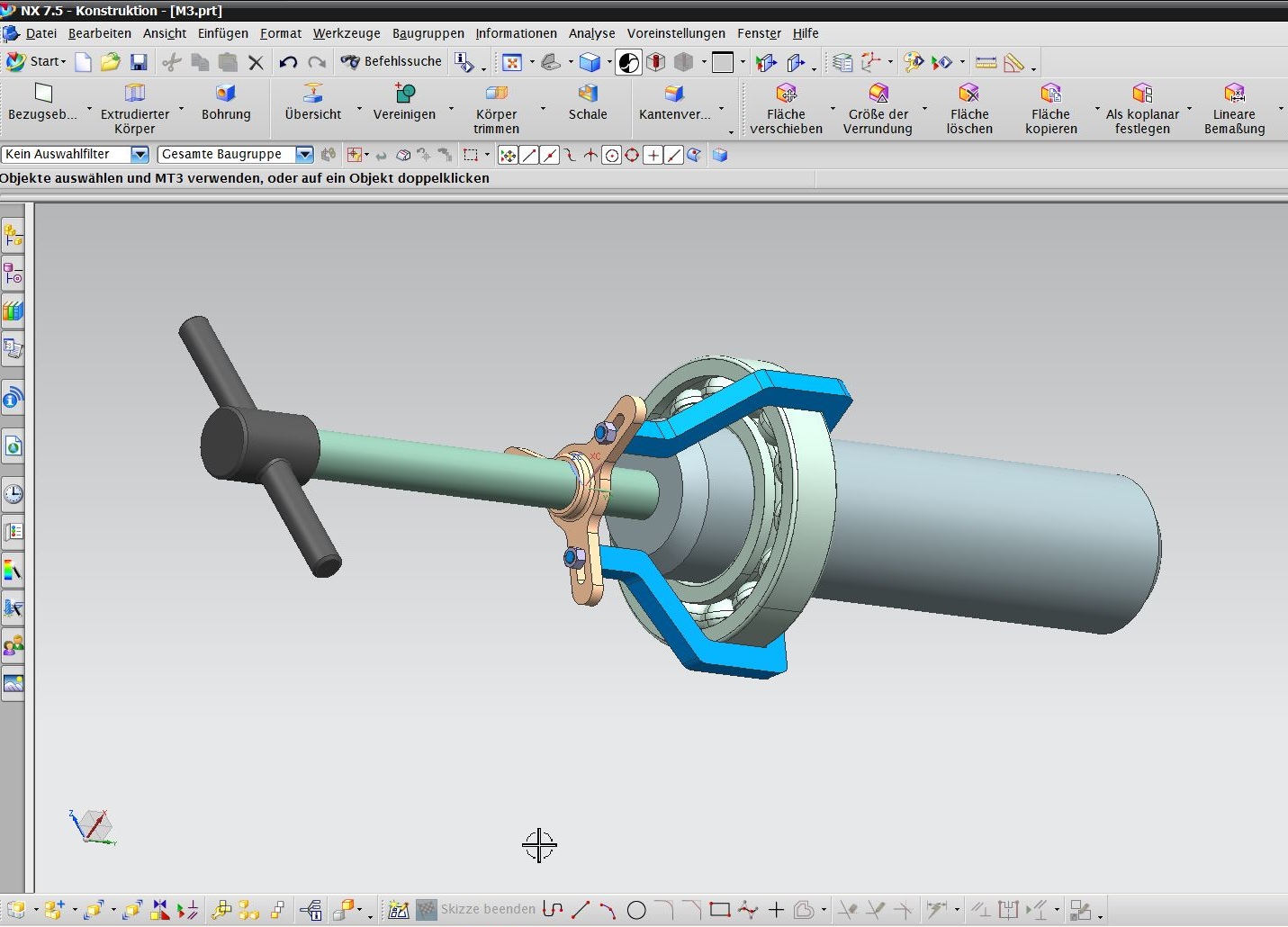
Hallo und ein frohes neues Jahr erstmal! Ich versuche eine ziemlich einfache Bewegung einer Lagerabziehvorrichung zu realisieren.
Leider kenn ich mich mit dem NX Kinematik Modul auch dafür nicht ausreichend aus.
Der Hebel und die Spindel sollen rotieren und dabei sollen gleichzeitig Hebel, Spindel und Welle eine translatorische Bewegung
nach unten machen.
Mein Lösungsansatz funktionert allerdings nicht. Grob beschrieben, habe ich 2 Verbindungen (Achsen hintereinanderangeordnet erzeugt) und diese mit einem einem "Zylindrischen Gelenk" für die rotatorische und translatorische Bewegung an Achse1 und einem "Schieberegler" an Achse2 für die translatorische Bewegung erzeugt. Diese habe ich mit einem "2-3 Gelenkkuppler" verbunden.
Über "Informationen" wurden mir auch 0 Freiheitsgerade angezeigt. Trotzdem erhalte ich die Fehlermeldung: ~Zuviele Freiheitsgerade. Danach habe ich erstmal versucht nicht die ganze Baugruppe zum rotieren zu bringen sondern lediglich den Hebel und nichtmals das ist mir geglückt (Ansatz mit einem Drehgelenk als Fahrer). Wäre echt super, wenn ihr mir ein wenig auf die Sprünge helfen könntet! Vielen Dank schonmal! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
FANUZIR
Mitglied
Beiträge: 38
Registriert: 29.11.2010 NX7.5.3.3 MP4
TCUA 8
|
erstellt am: 06. Jan. 2011 12:47 <-- editieren / zitieren --> Unities abgeben: Nur für jts 
Am einfachsten kannst Du die zwei Bewegungen miteinander verbinden und dann beide gleichzeitig laufen lassen. Je nachdem wie du die Werte für die translatorische Bewegung wählst (in Bezug zur Rotation) kannst die Steigung anpassen. 1.
Leg eine neue Datei an und hänge die Baugruppe an.
(Warum: weil die CAD Datei und die Simulationdatei zusammen gehören. Die Simulationsdatei ohne exakt die dazu gehörende Datei funktioniert nicht. Da an der Baugruppe in der Regel mehrer beteiligt sind kann so nichts an der Simulation passieren selbst wenn die Baugruppe verschwunden ist. Die Kinematik läuft!  ) )
2.
starte aus der neuen Datei NX Motion
3.
erzeuge im Motion Navigator eine neue Datei (New Simulation)
4.
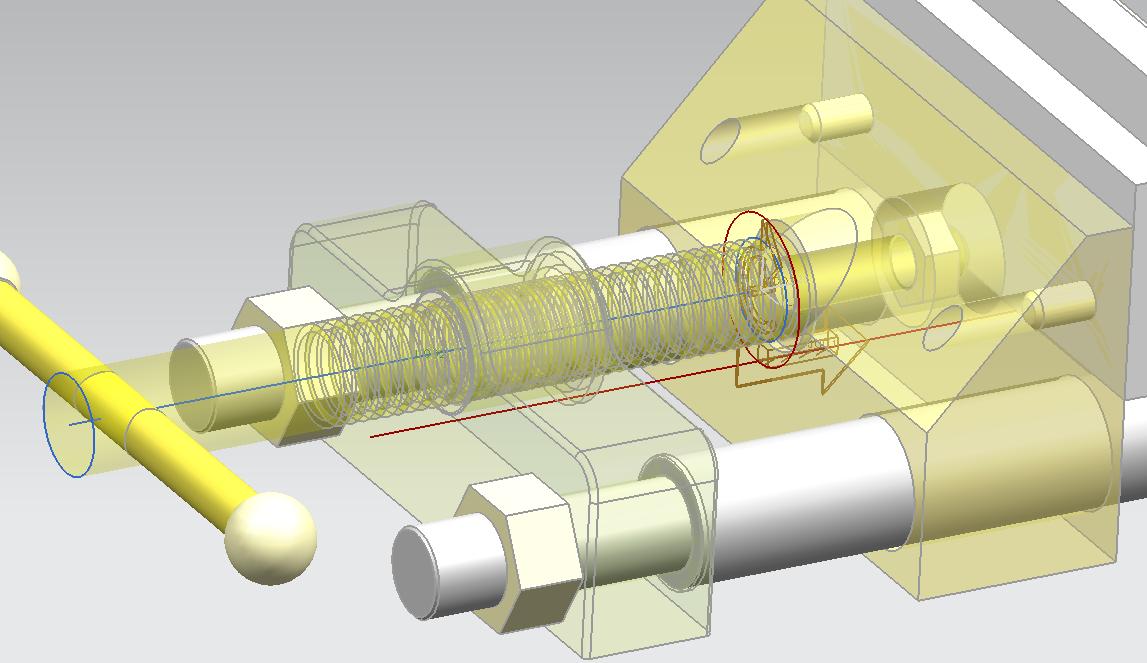
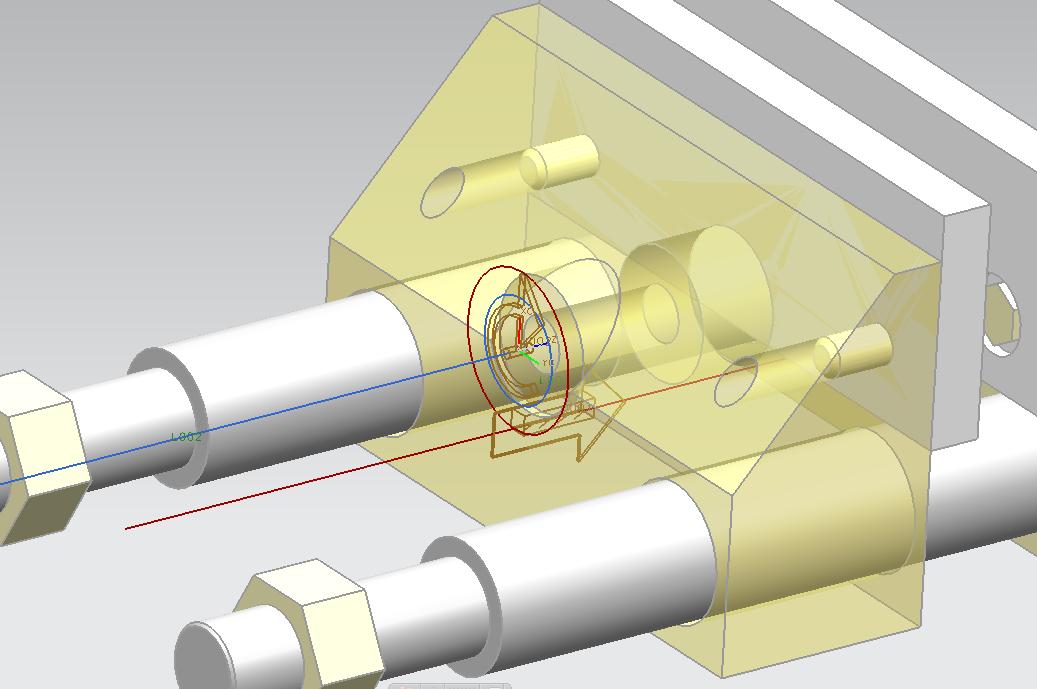
wechsele in der Simulation Datei ins Modeling und zeichne mit Linien eine Ersatzgeometrie. In deinem Beispiel extrahierst du von der Spindel einen Kreis um diesen Kreis herum zeichnest du einen neuen Kreis. Auf diesen Kreis zeichnest du in einem Quadrantenpunkt eine Linie senkrecht zum Kreis (parallel zur Spindelachse)
(Warum Linien: weil dann die Simulation unabhängig von den Bauteilen ist. Wenn jemand ungewollt "nichts gemacht" hat und der Link zur Baugruppe war mal kurz weg, dann leidet auch die Simulation ähnlich wie eine Zeichnung mit nicht assoziativen Maßen. Außerdem kommt vielen Konstrukteuren eine frei gemachte Linenkonstruktion vertraut vor .)
5.
den extrahierten Kreis mache zu dem Link "Spindel" und den äußeren Kreis zusammen mit der Line zum Link "Translation"
6.
Erzeuge einen Joint mit dem "Slider" wähle dazu die Line. Schalte nicht "snap Links"ein, dann sitzt der Slider fest am Grund. Die Line sorgt nebenbei auch gleich für die richtige Richtung des Slider. Definiere als Driver Articulation.
Name = Translation
7.
Erzeuge einen Joint "Revolute" schalte "Snap Links" ein. Snap Links verbindet zwei Links miteinander, Base und Action. Base ist der Kreis welcher mit der Line durch den Slider sich linear bewegen kann und Action ist der Kreis der Spindel. Definiere als Driver Articulation. Name = Rotation
8.
Mit "Edit Motion Object" jeweils die Links editieren und die zugehörigen Bauteile als "Components" anhängen
9.
Wähle im Motion Navigator "Simulation" und mit MB3 "solve"
10.
Im Articulation Fenster aktiviere Rottation und Translation und gebe passende Werte ein.
z.B 3,6° und 0,5mm bei 10 Steps ist das dann 5mm Steigung Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jts
Mitglied
Student
Beiträge: 11
Registriert: 04.01.2011
|
erstellt am: 06. Jan. 2011 16:26 <-- editieren / zitieren --> Unities abgeben:
Vielen Dank Fanuzir für die ausführliche Antwort! Leider schaffe ich es immer noch nicht, ich bekomme den gleichen Fehler.
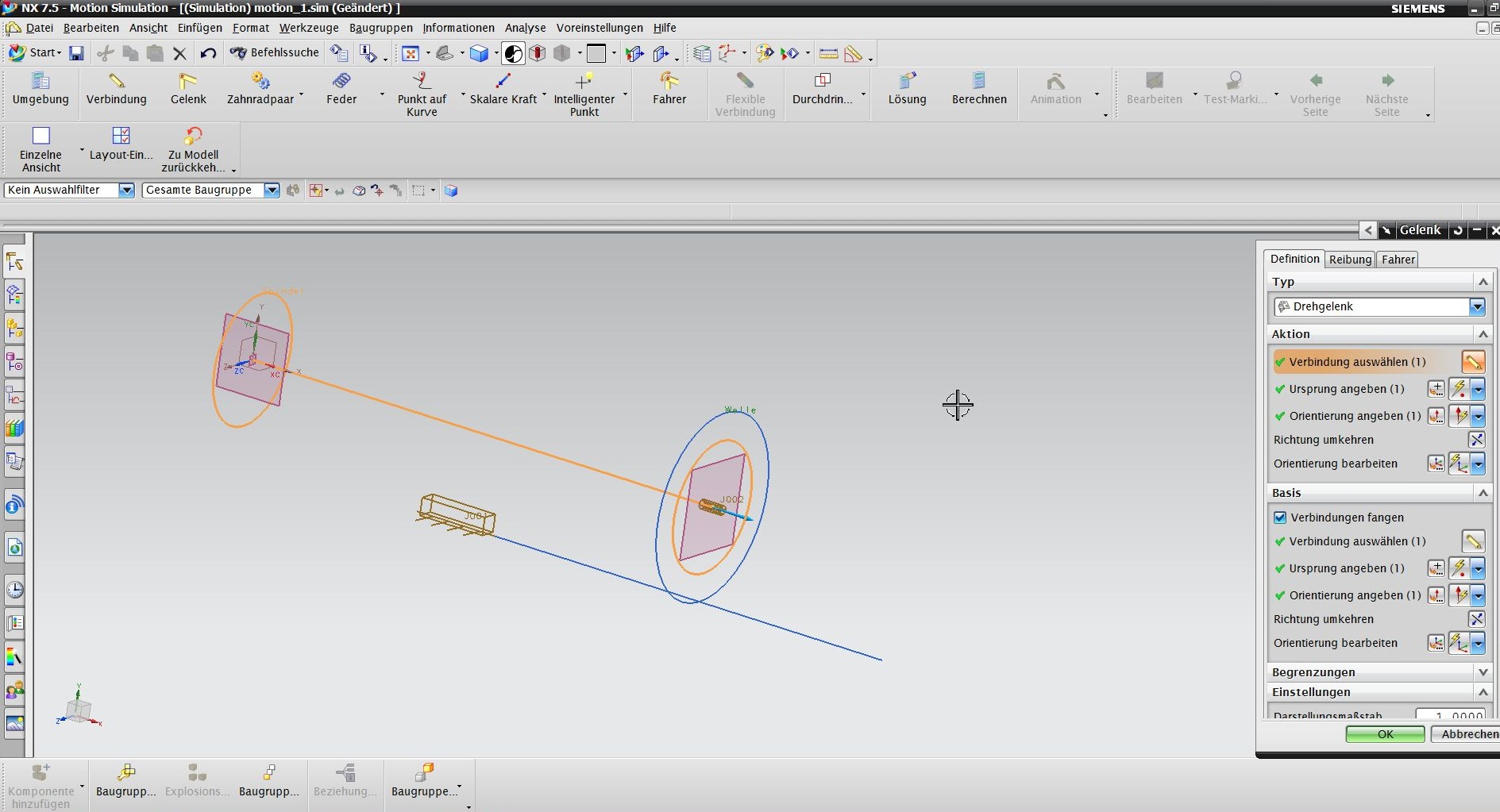
Mir ist auch schleiherhaft wo mein Fehler liegen könnte. Sind wohlmöglich die Gelenke falsch platziert oder habe ich die Verbindung falsch gefangen?
Auf dem Screenshot ist das Menü des Drehgelenks eingeblendet: Als Orientierung habe ich den kleinen rechten Spindelkreis angegeben.
Der Ursprung ist ja kein Vektor, sondern ein Punkt, so habe ich den Mittelpunkt des großen Kreises angegeben
(vermutlich falsch?) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
FANUZIR
Mitglied
Beiträge: 38
Registriert: 29.11.2010 NX7.5.3.3 MP4
TCUA 8
|
erstellt am: 06. Jan. 2011 17:19 <-- editieren / zitieren --> Unities abgeben: Nur für jts
Die Joints sehen gut aus, aber bei beiden fehlt der Motor. Im Bild habe ich gesehen, dass der Driver in der Deutschen Version Fahrer heißt. Mit Driver ist der Antrieb gemeint. Grusselig diese "Deutsche" NX Version. In der Registerkarte "Fahrer" den Antrieb auswählen, ist der untere in der Liste. "Articulation" hat bestimmt auch eine lustige Übersetzung. Beim Slider sind die Schraffurstriche vorhanden, das bedeutet er ist "fixed to Ground" (fixiert im Raum). Beim Drehgelenk ist "Verbindung fangen" gesetzt. Das ist auch gut. Tip:
Beim Erstellen von Kinematik Simulationen am Anfang erstmal nur einer Link erzeugen und dann einen Joint mit Antrieb einbauen und ausprobieren. Wenn es funktioniert, dann den nächsten Link definieren und zusammenbauen. Wenn man am Anfang alle Links bestimmt, dann hat man 6 Freiheitsgrade pro Link im System und muß erst alles zusammenbauen um testen zu können. Dann ist ein eventueller Fehler auch nur schwer zu finden. Man kann auch temporär einem Drehgelenk einen Antrieb zuweisen, dann nimmt das Drehgelenk 6 Freiheitsgrade. Beispiel Viergelenkkette, erst ein Glied mit Drehgelenk und Antrieb testen, dann Kopelglied mit Drehgelenk und vorübergehend auch mit Antrieb anbinden zum testen. Ohne Antrieb würde das Koppelglied sonst frei baumeln.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jts
Mitglied
Student
Beiträge: 11
Registriert: 04.01.2011
|
erstellt am: 08. Jan. 2011 12:58 <-- editieren / zitieren --> Unities abgeben:
Die beiden Fahrer (Driver) sind eingebaut. Die Richtungspfeile werden in dieser NX Version nur beim Fahrereinbau kurz angezeigt. Es klappt trotzdem nicht. Ich bekomme immer wieder den "Zuviele Freiheitsgerade Fehler" auch wenn mir vorher bei Information 0 angezeigt wurden. Ich glaube ich sollte einfach mal bei deinem Tip ansetzen, weil mir einfach das Grundverständnis fehlt. Mir gelang bis jetzt erst eine Kinematiksimulation mit Anleitung (2 Zahnräder). Es wär echt nett von dir, wenn du mir einfach nochmal erklären könntest wie ich einfach beispielsweise einen Zylinder zum rotieren bringe. Normalerweise müsste da doch einfach ein Drehgelenk mit rotierendem Antrieb reichen oder irre ich mich? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
FANUZIR
Mitglied
Beiträge: 38
Registriert: 29.11.2010 NX7.5.3.3 MP4
TCUA 8
|
erstellt am: 09. Jan. 2011 12:00 <-- editieren / zitieren --> Unities abgeben: Nur für jts
Ich nehme an Du hast eine Studentenversion. Dann hast Du auch NX CAST (Computer Aided Selv Teaching). Das ist unter Hilfe --> Training. Da gibt es gute Lernbeispiele. Zum Probleme in Deinem Beispiel
Der Grübler Count muß nicht genau null sein. Der kann auch negativ sein, aber nicht größer null.
Beispiel Viergelenkkette: 3* Glieder
--> 3*6=18 Freiheitsgrade {6=(3 Translation, 3 Rotation)} 4* Gelenke
ein Drehgelenk (ohne Fahrer  ) nimmt 5 Freiheitsgrade ) nimmt 5 Freiheitsgrade
--> 18-(4*5)= -2 (noch einen Fahrer dabei und dann sind es -3) 1.
kontrolliere im Simulation Navigator, dass da auch nur die Links (Bauteile) vorhanden sind, von denen du annimmst dass sie da sind. Links können im SimNav gelöscht werden. 2.
Kontrolliere in der Simulations Datei beim Erzeugen der Solution (Lösung?) ob der Soulution Type auf "Articulation" steht.
FANUZIR
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jts
Mitglied
Student
Beiträge: 11
Registriert: 04.01.2011
|
erstellt am: 09. Jan. 2011 18:13 <-- editieren / zitieren --> Unities abgeben:
Vielen Dank FANUZIR, ein anderes Forenmitgleid hat mir netterweise noch ein Video geschickt, in dem ein Zeiger zum rotieren gebracht wurde. Ich bin jetzt fertig und es war tatsächlich ein grundlegendes Problem:
Die Fahrer waren auf konstant eingestellt und nicht auf Artikulation. Ich habe einfach 2 Grundkurven erzeugt, eine mit Drehgelenk und eine mit Schieber. Mit dem Drehgelenk hab ich dann die Translationsachse gefangen. Danke nochmal für Deine/eure Mühe! Gruß
jts Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
JimmyJ
Mitglied
Student, Maschinenbau
Beiträge: 4
Registriert: 10.01.2011 Windows 7, Siemens NX 7.5 (Mach 3 Suite CAE) jetzt soll das RecurDyn Add-On mit installiert werden.
Bitte um Erfahrungsbereichte! Oder Kontakte zu Personen, welche bereits damit gearbeitet haben.
|
erstellt am: 10. Jan. 2011 21:56 <-- editieren / zitieren --> Unities abgeben: Nur für jts
Hallo zusammen, derzeit arbeite ich als Student bei einem Unternehmen im Bereich - Maschinenbau.
Meine Aufgabe ist es eine Kette für ein neues Fahrzeug zu simulieren, dabei wurde mir die
Software NX Motion Simulation RecurDyn empfohlen.
Hat jemand bereits Erfahrung mit RecurDyn. Auf der Seite www.recurdyn-gbr.de hab ich
gesehen, dass diese Firma Siemens PLM Solution Partner ist. Bitte um kurzes Feedback zu der Software und ob damit eine Kette simuliert werden kann? Danke und Grüße  Zitat:
Original erstellt von jts:
Hallo und ein frohes neues Jahr erstmal!Ich versuche eine ziemlich einfache Bewegung einer Lagerabziehvorrichung zu realisieren.
Leider kenn ich mich mit dem NX Kinematik Modul auch dafür nicht ausreichend aus.
Der Hebel und die Spindel sollen rotieren und dabei sollen gleichzeitig Hebel, Spindel und Welle eine translatorische Bewegung
nach unten machen.
Mein Lösungsansatz funktionert allerdings nicht. Grob beschrieben, habe ich 2 Verbindungen (Achsen hintereinanderangeordnet erzeugt) und diese mit einem einem "Zylindrischen Gelenk" für die rotatorische und translatorische Bewegung an Achse1 und einem "Schieberegler" an Achse2 für die translatorische Bewegung erzeugt. Diese habe ich mit einem "2-3 Gelenkkuppler" verbunden.
Über "Informationen" wurden mir auch 0 Freiheitsgerade angezeigt. Trotzdem erhalte ich die Fehlermeldung: ~Zuviele Freiheitsgerade. Danach habe ich erstmal versucht nicht die ganze Baugruppe zum rotieren zu bringen sondern lediglich den Hebel und nichtmals das ist mir geglückt (Ansatz mit einem Drehgelenk als Fahrer). Wäre echt super, wenn ihr mir ein wenig auf die Sprünge helfen könntet! Vielen Dank schonmal!
------------------
Jimmy Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
uger
Mitglied
CADler & Kinematiker
Beiträge: 1129
Registriert: 25.02.2003 NX2015
WIN10 64Bit
|
erstellt am: 11. Jan. 2011 07:52 <-- editieren / zitieren --> Unities abgeben: Nur für jts
Hallo JimmyJ, siehe http://ww3.cad.de/foren/ubb/Forum4/HTML/006650.shtml In meiner NX4 (ob sich in den höheren Versionen da etwas verbessert hat kann ich nicht sagen) ist die Simulation von Riemen- oder Kettentrieben nicht möglich (1. nur wenn man viel Aufwand betreibt und trickst / 2. Wenn das in den höheren Versionen immer noch so ist dann ist das eine echte Katastrophe, da dies Standartelemenet im Masch.Bau sind.) Ausserdem darf man von dem, was auf der Internetseite von www.functionbay.de gesagt wird, leider nicht alles in NX erwarten. Die Schnittstelle zwischen NX und dem Recurdyn-Solver bzw. die Benutzeroberfläche der Kinematik in NX erlauben nicht alles was der Solver als eigenständiges Programm könnte! Ich habe mir den Recurdyn auch schon vorführen lassen. Sieht toll aus!! Da kann man eine Kette mit allen Gliedern laufen lassen und sieht wie sie flattert wenn der Achsabstand zu gering ist. Das ist aus dem NX heraus nicht möglich. Hinweis: alle Infos Stand NX4 uger ------------------

Deine Wahrnehmung bestimmt deine Realität!
NDS Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
JimmyJ
Mitglied
Student, Maschinenbau
Beiträge: 4
Registriert: 10.01.2011 Windows 7, Siemens NX 7.5 (Mach 3 Suite CAE) jetzt soll das RecurDyn Add-On mit installiert werden.
Bitte um Erfahrungsbereichte! Oder Kontakte zu Personen, welche bereits damit gearbeitet haben.
|
erstellt am: 15. Jan. 2011 01:04 <-- editieren / zitieren --> Unities abgeben: Nur für jts
|

| |
Thomas248
Mitglied
Maschinenbauingenieur
Beiträge: 4
Registriert: 21.01.2011
|
erstellt am: 23. Jan. 2011 20:18 <-- editieren / zitieren --> Unities abgeben: Nur für jts
Hi Jimmy, deine Frage verlässt ein wenig den ursprünglichen Beitrag.
Daher nur kurz: Auch in NX 7.5 gibt es im Motion Tool kein dediziertes Modul für Ketten, Riemen oder auch Verzahnungen. Klar das sind schon Grundelemente im Maschinenbau, insofern schade. Allerdings können die Simulationen derselben durchaus anspruchsvoll sein, da es darauf ankommt, welche Ergebnisse Du von der Simulation erwartest bzw. welche physikalischen Phänomene im Simulationsmodell enthalten sein sollen.
Wenn dein "Job" eine Kettensimulation sein soll, dann müsste man wissen, was Deine Uni von Dir erwartet.
Also benötigst Du lediglich die Drehschwingungen zwischen zwei Kettenrädern? Soll die Kette realistisch durchlaufen? Sind die Polygoneffekte durch den Zahneingriff von Bedeutung (z.B: wichtig für NVH Untersuchungen). Hat die Kette eine Spannvorrichtung (hydraulisch??)?
Welcher Art ist die Kette (Zahnkette, Rollenkette,..)?
Muss die Ketten Material transportieren, oder hat diese eine Steuerungsfunktion? D.h. um zu entscheiden, ob man Deine Problemstellung in NX Motion lösen kann, oder ob hier besser auf die RecurDyn Standalone Version zurückgegriffen werden muss, hängt von der genaueren Problemstellung ab. Wenn es Dir möglich ist, diese ein wenig genauer zu formulieren, kann Dir sicher geholfen werden  Viele Grüße Thomas Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|