| | |
 | BOM Assistant für Stücklistenerstellung , eine App
|
|
Autor
|
Thema: Problem mit statischer Überbestimmtheit? (3988 mal gelesen)
|
Janosch85
Mitglied
Student
   Beiträge: 9
Registriert: 23.07.2007 Windows 7
ProE Wildfire 5
|

 erstellt am: 20. Feb. 2011 19:41
erstellt am: 20. Feb. 2011 19:41  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
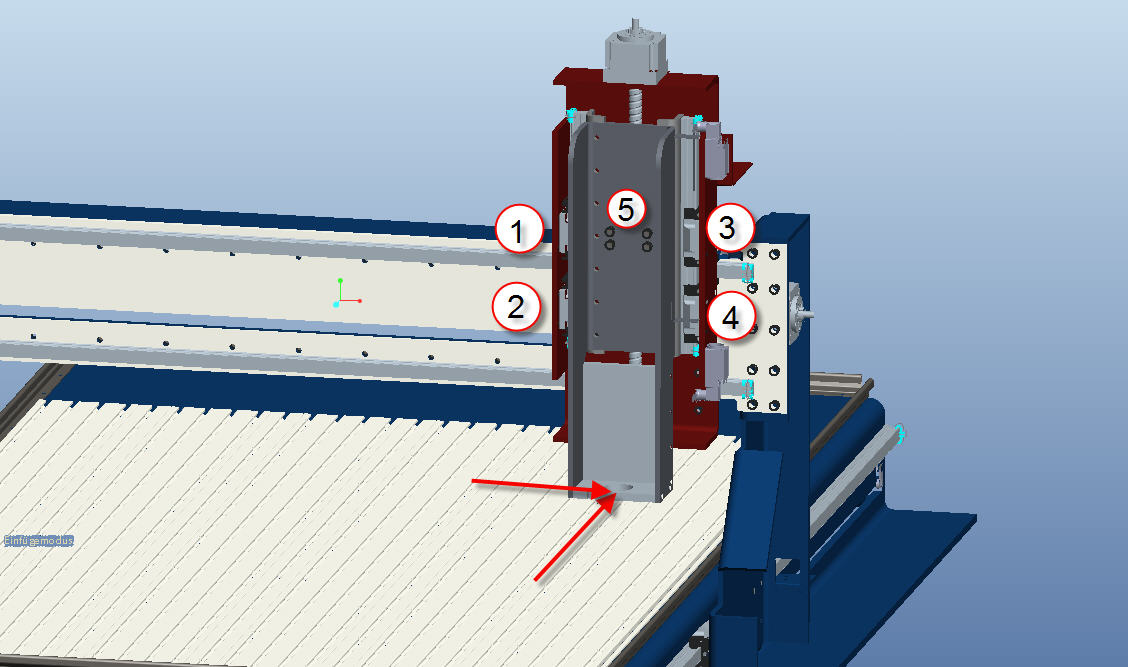
Hallo zusammen, für ein Uni-Projekt konstruiere ich derzeit eine CNC-Maschine. Der Schlitten der z-Achse (grau)ist über 4 Linearlager (1-4) mit dem roten "Gehäuse" verbunden. Von hinten ist die Mutter der Spindel angeschraubt (Nr. 5). Ich möchte nun in Pro/Mechanismus die Lagerlasten der 5 Lager in abhängigkeit der angreifenden Kräfte errechnen lassen. Hierfür habe ich die Baugruppe mit 4 Schubgelenken für die Linearlager und einem Drehschubgelenk für die Spindelmutter eingebaut. Wenn ich das Ganze jetzt simulieren, hat allerdings nur das Lager Nr. 5 eine Lagerreaktion. Die anderen Lager nehmen keine Kräfte auf.
Hat hier jemand eine Erklärung für?
Grüße! [Diese Nachricht wurde von Janosch85 am 20. Feb. 2011 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
uk66
Mitglied

Beiträge: 75
Registriert: 17.03.2010 Wildfire 3 M090
Wildfire 4 M200
Wildfire 5 M070
Creo/Pro M220
Creo 1.0 M040
Creo 2.0 M140
Creo 3.0 M040
HP EliteBook 8770w; 16GB RAM; 8 Kerne; AMD FirePro M4000
WIN7x64
|
erstellt am: 21. Feb. 2011 09:30 <-- editieren / zitieren --> Unities abgeben: Nur für Janosch85 
Hallo! Das hört sich für mich, wie Du bereits vermutet hast, nach Redundanz an. Reale Systeme sind in der Regel überbestimmt (redundant), was dort dann zu Verspannungen etc. führen kann. Das kann mit Mechanismus aber leider nicht abgebildet werden. Um sicher zu sein, dass die berechneten Werte auch was taugen, sollte in jedem Fall Redundanz vermieden werden. Das schaffst Du aber nur, indem Du geeignete Kombinationen der Gelenke nutzt (statt einem Drehgelenk z.B. ein Kugelgelenk und ein Zylindergelenk kombinieren, wenn an zwei Stellen gelagert werden soll --> z.B. eine Tür mit 2 Scharnieren). Die verwendeten Schubgelenke lassen alle nur eine Bewegung zu (translatorisch). Wenn dann mehrere zusammen wirken, sperren sie alle die gleichen Freiheitsgrade mehrfach, was dann zur Redundanz führt. Leider kann ich keine spontane Lösung, sprich Gelenkkombination hervorzaubern, da man da schon etwas Denkarbeit einbringen muss. Ich hoffe, ich konnte mich halbwegs verständlich machen  Gruß,
Uwe Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Janosch85
Mitglied
Student
Beiträge: 9
Registriert: 23.07.2007 Windows 7
ProE Wildfire 5
|
erstellt am: 21. Feb. 2011 19:15 <-- editieren / zitieren --> Unities abgeben:
Arrrg, das ist natürlich sehr ärgerlich. Das reale System ist ja auch statisch überbestimmt und genau das möchte ich ja abbilden. Eine Vermeidung von Redundanzen mit anderen Lager ist warscheinlich möglich, stellt dann aber nicht mehr das reale System dar... Aber Danke für die Antwort! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Micha K.
Mitglied
Dipl.-Ing. FH
Beiträge: 186
Registriert: 14.03.2008 WF 4.0
|
erstellt am: 22. Feb. 2011 07:56 <-- editieren / zitieren --> Unities abgeben: Nur für Janosch85
Hallo, wenn die Schraube an die Schlitten montiert sind, würde ich das System zerlegen. Ich kann ja die Reaktionskräfte der Schrauben und des Trägers auf die Schlitten übertragen. Sprich das Gesamtsystem besteht aus mehreren Teilsystemen. A: Der Spindelträger, der eine Reaktion auf die Platte der Linearführungen und den Schrauben ausübt. Oder sind die 4 Linearführungen nicht fest über eine Platte miteinander Verbunden? Die Schrauben übertragen dabei nur Zug und unterhalb dieser baut sich ein Druckdreieck auf, das als Einzelkraft angetragen werden könnte (Schräge Kraft). Die zweite Komponente (Horizontal im 2 D Bild) teilt sich in Einzelkräfte auf die Schrauben auf. Sprich ein Moment. B: Reaktion der Linearführungen auf den Hauptträger.
Allerdings muss ich sagen, dass ich Mechanismus nur mal kurz gestreift habe und nie richtig verwendet, deshalb weiß kann ich nicht sagen ob das auf diese Art möglich ist.
Es gibt Verfahren mit dehnen man die Reaktion der Linearführungen berechnen kann. Edit: Man müsste sie entsprechend abwandeln. Z.B. Kraftgrößenverfahren
http://www.uni-siegen.de/fb10/subdomains/baustatik/lehre/bst/unterl agen_unvertieft/kgv/kgv_erlaeuterung.pdf
http://www.statik.tu-berlin.de/uploads/media/St2_KGV_CR.pdf oder Weggrößenverfahren
http://www.fh-buxtehude.de/fbb/lehre/goettsche/wgv.pdf
http://www.ibs.kit.edu/download/butz.pdf Wobei ersteres eigentlich geeigneter scheint, wenn man Lagerreaktionen bekommen möchte. Aber vieleicht weiß jemand anderes wie man Mechanismus überzeugen kann. Grüße Micha
[Diese Nachricht wurde von Micha K. am 22. Feb. 2011 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
googol123
Mitglied
Ingenieur
Beiträge: 1
Registriert: 03.03.2011
|
erstellt am: 03. Mrz. 2011 23:59 <-- editieren / zitieren --> Unities abgeben: Nur für Janosch85
Na ja du musst halt die Realität so gut wie möglich nachbilden! Mindestens wissen was du willst! Was passiert den eigentlich. Du hast die Schlittenführungen, also definierst du Kontaktflächen, der Schlitten stützt sich ja gegen die Führungen ab! Das sind keine Schubgelenke! Du brauchst Schubgelenke nur für lineare Bewegungen. Du willst aber keine Bewegung sondern Kontaktkräfte an den Führung berechnen lassen! So als nächstes geht es um die Spindel! Wenn du sagst die Biegesteifigkeit der Spindel ist mir egal, das Ding biegt sich nicht durch (was in Realität jedoch der Fall ist), dann musst du ein Zylinderlager für die Mutter bzw. den Schlitten definieren (kein Schubgelenk,da beim Schubgelenk keine Rotation und somit auch keine Kontaktkräfte an den Führungen!) Wenn deine Reaktionskräfte an der Achse ansetzen, auf der du dein Zylinderlager definiert hast, dann hast du kein Moment um die Achse, und du kannst die Kontaktkräfte an den Führungen vergessen, da kein Moment vorhanden. OK hier erstmal ein Break! Du merkst man muss genau das System verstehen! Gruß  Philip Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Janosch85
Mitglied
Student
Beiträge: 9
Registriert: 23.07.2007 Windows 7
ProE Wildfire 5
|
erstellt am: 13. Mrz. 2011 12:59 <-- editieren / zitieren --> Unities abgeben:
Hallo zusammen, vielen vielen Dank für eure Mühen und Antworten... Denke ich habs kapiert... ProMechanismus kann keine überbestimmten Systeme simulieren, daher muss ich das System dahingehend vereinfachen, dass keine Überbestimmtheit auftritt und muss mit der Vereinfachung leben. Für meine Uni-Projekt habe ich mich für eine andere Simulationsaufgabe entschieden; werde das benötigte Anfahrmoment für die x-Achse simulieren... das macht weniger Probleme  Grüße! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Wyndorps
Ehrenmitglied V.I.P. h.c.
Ingenieur

Beiträge: 4596
Registriert: 21.07.2005
|
erstellt am: 13. Mrz. 2011 14:36 <-- editieren / zitieren --> Unities abgeben: Nur für Janosch85
Zitat:
Original erstellt von Janosch85:
... Für meine Uni-Projekt habe ich mich für eine andere Simulationsaufgabe entschieden [...] das macht weniger Probleme
Grüße!
 Na dann sei mal froh, dass Du noch Student bist. Im wahren Ingenieurleben kannst Du technische Probleme dann nicht mehr "abwählen". ------------------
---------------- "Ich stimme mit der Mathematik nicht überein. Ich meine, daß die Summe von Nullen eine gefährliche Zahl ist." (Stanislaw Jerzy Lec) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de