| | |
 | BOM Assistant für Stücklistenerstellung , eine App
|
|
Autor
|
Thema: Geschwindigkeit ermitteln (1118 mal gelesen)
|
Pimsti
Mitglied
Mechatroniker

   Beiträge: 197
Registriert: 17.01.2006 Wildfire 2.0 - M050
Win XP Professional (+SP2)
NVIDIA GeForce 6600 GT
AMD Athlon 64 4000+ (2,4GHz)
1 GB RAM
|

 erstellt am: 05. Jul. 2007 11:45
erstellt am: 05. Jul. 2007 11:45  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Funktionsweise siehe kleines Video im Anhang. Ich habe die Bewegung mit einem Servomotor über die Translation der Kolbenstangenfläche zum Zylinderboden definiert. Alles klappt so wie es sein sollte. nun wollte ich mir aber von dem Schwenkteil die Geschwindigkeit eines Punktes mittels einer Meßgröße ermitteln lassen. Dies funktioniert jedoch nicht, da er immer "nicht berechnet" neben der Meßgröße schreibt. Positionen kann man wunderbar ermitteln. Die Analyse die ich durch geführt habe ist eine vom Typ "Wiederholte Baugruppe" da ich mit diesem definierten Motor, keine Analayse vom Typ "Kinematik" durchführen kann. Warum eigentlich nicht. Leider ist die Baugruppe zu groß um sie zu posten. ------------------
Geht nicht - gibts nicht! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
michaeln
Mitglied
Konstrukteur
Beiträge: 834
Registriert: 07.10.2002 WF2 M250, ProI 3.4 M030
WinXP-x64 SP2, Debian Etch
|
erstellt am: 05. Jul. 2007 17:07 <-- editieren / zitieren --> Unities abgeben: Nur für Pimsti 
Hallo, das geht leider nicht.
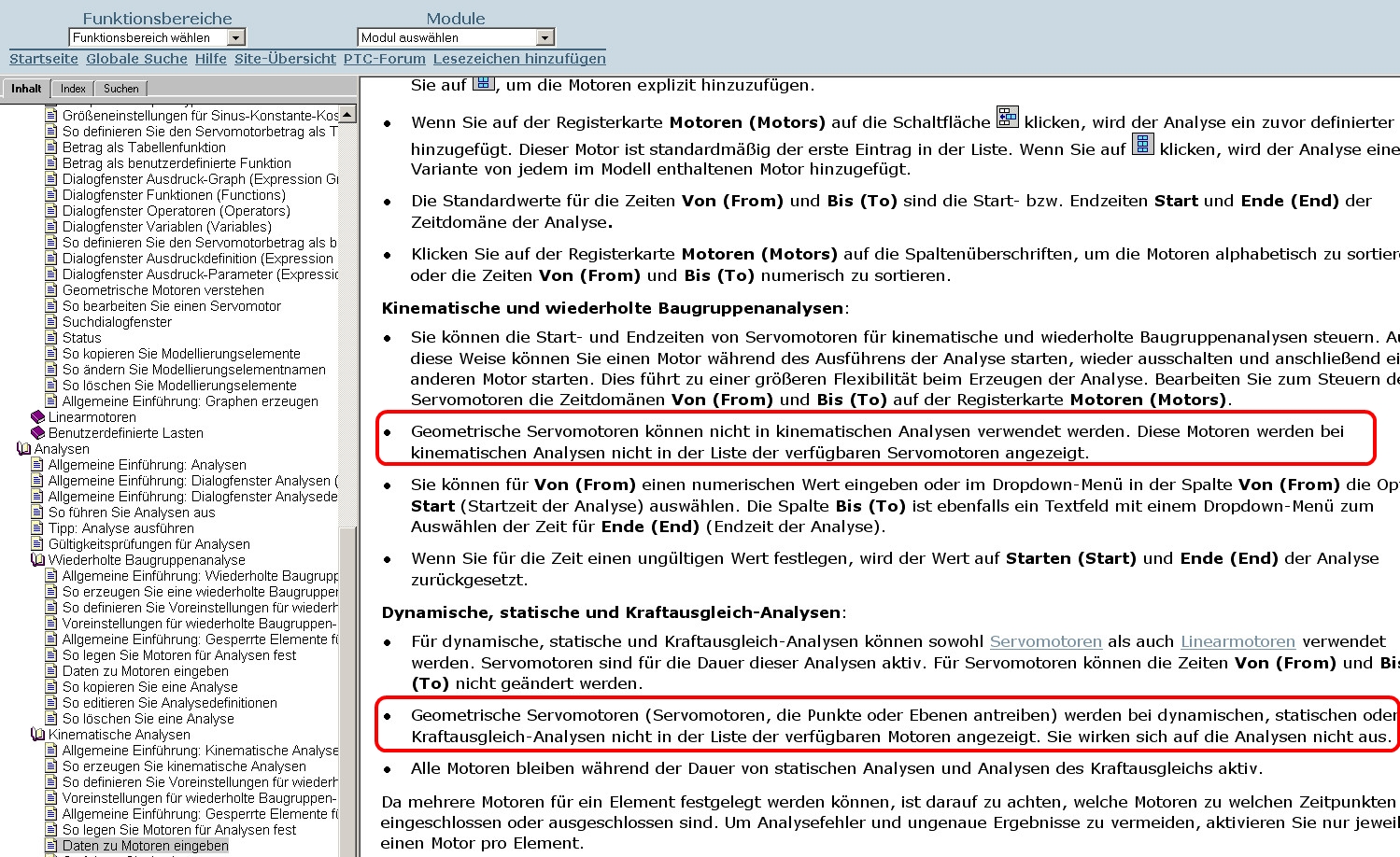
Bei Bewegungen, die durch einen translatorischen Antrieb angetrieben werden, können keine Geschwindigkeiten und Beschleunigungswerte als Meßergebnisse ermittelt werden. Das geht erst mit einer kinematischen Analyse, doch dafür können die translatorischen Servomotoren nicht verwendet werden.
Ich finde dies momentan ein großer Schwachpunkt vom MDX/MDO-Modul, könnte man ja öfters brauchen.
Übrigens: Die WF4-PreProduktion verhält sich auch noch so. Gruß Michael ------------------
Ich mach keine rächtschraibfeler ich bin nur ein par rächtschraibräformen voraus! [Diese Nachricht wurde von michaeln am 05. Jul. 2007 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Pimsti
Mitglied
Mechatroniker
Beiträge: 197
Registriert: 17.01.2006 Wildfire 2.0 - M050
Win XP Professional (+SP2)
NVIDIA GeForce 6600 GT
AMD Athlon 64 4000+ (2,4GHz)
1 GB RAM
|
erstellt am: 06. Jul. 2007 06:34 <-- editieren / zitieren --> Unities abgeben:
Könnte ich das ganze umgehen wenn ich nur für die Simulation den translatorischen Antrieb über irgend eine Zwangsbedingung mit einen rotatorischen Antrieb verknüpfe und in der Simulation den Servomotor der Rotation verwende?. ------------------
Geht nicht - gibts nicht! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
michaeln
Mitglied
Konstrukteur
Beiträge: 834
Registriert: 07.10.2002 WF2 M250, ProI 3.4 M030
WinXP-x64 SP2, Debian Etch
|
erstellt am: 06. Jul. 2007 06:54 <-- editieren / zitieren --> Unities abgeben: Nur für Pimsti
Ja, solche Umwege sind möglich. Hier in dem Beispiel würde ich eine Kurvenscheibe schnitzen und deren Drehpunkt in das ortsfeste Lager des Zylinders legen. In den Kolben einen Punkt und eine Kurvenrolle einfügen sowie in die Kurvenscheibe einen gleichmäßig drehenden zusätzlichen Servo-Motor einbauen. Dann die Simulation ablaufen lassen und auf der Kurvenscheibe durch den Punkt eine Spurkurve erzeugen lassen. Dann durch eine Versatzkurve zur Spurkurve (Versatz=Kurvenrollenradius) einem Materialschnitt erzeugen. Jetzt nur noch die Simulation umbauen (oder kopieren) mit einem Servomotor für die Kurvenscheibe und einer Kurvenverbindung zwischen Kurvenscheibe und Kurvenrolle. Einen einfacheren Weg habe ich leider noch keine gefunden. Gruß Michael ------------------
Ich mach keine rächtschraibfeler ich bin nur ein par rächtschraibräformen voraus! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
 erstellt am: 06. Jul. 2007 07:44 <-- editieren / zitieren -->
erstellt am: 06. Jul. 2007 07:44 <-- editieren / zitieren -->
Zitat:
Original erstellt von michaeln:
Hallo,das geht leider nicht.
Bei Bewegungen, die durch einen translatorischen Antrieb angetrieben werden, können keine Geschwindigkeiten und Beschleunigungswerte als Meßergebnisse ermittelt werden. Das geht erst mit einer kinematischen Analyse, doch dafür können die translatorischen Servomotoren nicht verwendet werden.
...
wie kommst Du dadrauf?
Ich hatte damit noch nie Probleme.
------------------
Gruß aus dem Norden (noch) |
Pimsti
Mitglied
Mechatroniker
Beiträge: 197
Registriert: 17.01.2006 Wildfire 2.0 - M050
Win XP Professional (+SP2)
NVIDIA GeForce 6600 GT
AMD Athlon 64 4000+ (2,4GHz)
1 GB RAM
|
erstellt am: 06. Jul. 2007 08:14 <-- editieren / zitieren --> Unities abgeben:
@Peddersen: Das heißt also ich kann nur Geschwindigkeiten ermitteln wenn ich eine Kinematische Analyse durchführe? Aber dort kann ich die definierten Servomotoren für die Linearachse nicht auswählen? ------------------
Geht nicht - gibts nicht! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
michaeln
Mitglied
Konstrukteur
Beiträge: 834
Registriert: 07.10.2002 WF2 M250, ProI 3.4 M030
WinXP-x64 SP2, Debian Etch
|
erstellt am: 06. Jul. 2007 08:25 <-- editieren / zitieren --> Unities abgeben: Nur für Pimsti
Hallo Peddersen, du machst mich neugierig. Ist das tatsächlich eine Kinematische Analyse oder nur Wiederholte Baugruppe (wo Geschwindigkeit oder Beschleunigung als Meßergebnis nicht gehen)?
Wie hast du den Motor definiert? Wenn ich doch einen translatorische Antrieb will, muß man doch einen geometrischen Motor (mit Ebenen und/oder Punkten) definieren. Doch diese lassen sich ja nicht in eine kinematische Analyse einbinden, oder?
Mach ich da was falsch? Würde mich ja freuen, wenn es einen vernünftigen Weg geben würde. Gruß Michael ------------------
Ich mach keine rächtschraibfeler ich bin nur ein par rächtschraibräformen voraus! [Diese Nachricht wurde von michaeln am 06. Jul. 2007 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 06. Jul. 2007 10:44 <-- editieren / zitieren -->
Zitat:
Original erstellt von michaeln:
...Wie hast du den Motor definiert? Wenn ich doch einen translatorische Antrieb will, muß man doch einen geometrischen Motor (mit Ebenen und/oder Punkten) definieren. Doch diese lassen sich ja nicht in eine kinematische Analyse einbinden, oder?
Mach ich da was falsch? Würde mich ja freuen, wenn es einen vernünftigen Weg geben würde.Gruß Michael
na, halt keinen geometrischen Motor sondern eine Bewegungsachse verwenden.
Bei planarere Verbindungsdefinition kann man diese als Bewegungsachse für eine translatorische Bewegung definieren. ------------------
Gruß aus dem Norden (noch) [Diese Nachricht wurde von Peddersen am 06. Jul. 2007 editiert.] |
michaeln
Mitglied
Konstrukteur
Beiträge: 834
Registriert: 07.10.2002 WF2 M250, ProI 3.4 M030
WinXP-x64 SP2, Debian Etch
|
erstellt am: 06. Jul. 2007 11:27 <-- editieren / zitieren --> Unities abgeben: Nur für Pimsti
Hallo Peddersen, vielen Dank für den Tip. Da bin ich leider nie drauf gekommen. Ich hatte dazu sogar mal einen Call bei der Hotline, doch da ist nichts Vernünftiges herausgekommen. Da sieht man mal, was das CAD.de-Forum wert ist. Das gibt natürlich 10Ü's (wäre mir eigentlich auch mehr wert). Gruß Michael ------------------
Ich mach keine rächtschraibfeler ich bin nur ein par rächtschraibräformen voraus! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de