| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für Creo |
| | |
 | Neuer Geschäftsführer bei Software Factory GmbH, eine Pressemitteilung
|
|
Autor
|
Thema: Hebelkraft als Ergebnisgröße (1729 / mal gelesen)
|
Mondros
Mitglied
Maschinenbauingenieur
   Beiträge: 8
Registriert: 05.07.2021 Creo Parametric 4.0 M110
|

 erstellt am: 07. Jul. 2021 08:59
erstellt am: 07. Jul. 2021 08:59  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
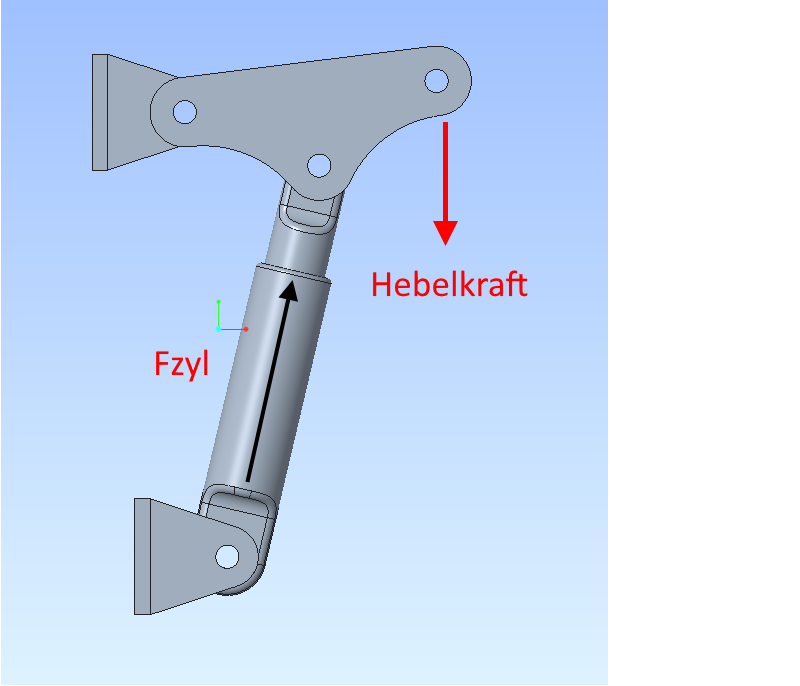
Hallo zusammen, Ich arbeite mich gerade in Creo Parametric 4.0 (M110) ein und könnte euer know how brauchen. Ich habe Creo Design Premium zur Verfügung. Ich habe eine Kinematik die im Grunde ein einfacher Hebel ist. (Im Anhang vereinfacht) Ich würde gerne die Zylinderkraft vorgeben und die Hebelkraft als Ergebnisgröße über der Zeit oder der Zylinderlänge darstellen.
Geht das überhaupt?  Ich bin unsicher, wie ich die Motoren im Zylinder definieren muss. Entweder eine konstante Kraft (Linearmotor) oder zusätzlich noch ein positionsgesteuerter Motor? Und bei den Ergebnisgrößen währe das wohl am ehesten eine resultierende kraft. Aber da weis ich nicht wie ich diese definieren soll.
Bei einem Kraftausgleich bekomme ich die Hebelkraft immer nur für einen Punkt.... Hat einer von euch bereits ähnliches gemacht und kann mir weiterhelfen? Das wär super 
Mit freundlichen Grüßen
Morian
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mondros
Mitglied
Maschinenbauingenieur
Beiträge: 8
Registriert: 05.07.2021 Creo Parametric 4.0 M110
|
erstellt am: 08. Jul. 2021 14:13 <-- editieren / zitieren --> Unities abgeben:
Also in SolidWorks ist es möglich, indem ich einen vertikalen Positionsmotor an das bewegliche Ende des Hebels definiere. Wenn ich jetzt eine konstante Kraft im Zylinder definiere kann ich die Kraft messen, die am Bewegungsmotor wirkt. (Also Funktion über die Zeit) Wenn ich das bis jetzt richtig verstehe, kann ich den Positionsmotor zwar in Creo definieren, aber nicht für eine dynamische Analyse... Stimmt es, dass ich nur Motoren für dynamische Analysen nutzen kann, die an einer vordefinierten Verknüpfung (Schubgelenk) positioniert sind? Grüße Morian
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
BergMax
Moderator
Dipl.-Ing. (FH)
    

Beiträge: 2346
Registriert: 23.08.2005 Creo 8.0.3.0
Creo 10.0.9.0
GT/SUT 8 und 11
HP z440, Quadro K2200, Win11 Enterp.
DualView
|
erstellt am: 12. Jul. 2021 11:37 <-- editieren / zitieren --> Unities abgeben: Nur für Mondros 
Moin... noch steige ich nicht ganz durch... Ein vertikaler Positionsmotor? Was bitte soll sich da vertikal bewegen? Selbstverständlich kann man einen Positionsmotor in einer dynamischen Analyse verwenden. Kann es sein, dass du das mit einem Geometriemotor verwechselst, bei dem zwei Geomietrie-Elemente (z.B. Abstand zweier Ebenen) gegeneinander bewegt werden? Positionsmotor: Die Position einer Achse wird gesteuert (ja, es muss eine definierte Gelenkachse sein)
------------------
Beste Grüße
Max Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mondros
Mitglied
Maschinenbauingenieur
Beiträge: 8
Registriert: 05.07.2021 Creo Parametric 4.0 M110
|
erstellt am: 12. Jul. 2021 12:51 <-- editieren / zitieren --> Unities abgeben:
Moin BergMax, danke für deine Antwort.
Mit vertikalem Positionsmotor meine ich einen linearen Positionsmotor, der vertikal angeordnet ist. Die Bewegung ist als vertikal nach oben.
Aber du hast recht, ich definieren einen Geometriemotor (Wusste nicht das das so heißt und das es da unterschiede gibt). In diesem fall zwischen Mittelpunkt der Bohrung (wo ich die Kraft wissen möchte) und einer horizontalen ebene. Gibt es denn eine Möglichkeit diesen Motor in eine Kraftanalyse einzubeziehen? Oder kann ich eine Gelenkachse irgendwie manuell erzeugen? Ich habe jetzt versucht das bewegliche Ende des Hebels mittels "Führung" auf einen Kreis bzw. einer vorher erzeugten Spurkurve platzieren. An dieser Gelenkachse kann ich einen Positionsmotor definieren und auch die Gelenkkräfte messen.
Leider bekomme ich da noch völlig falsche Werte raus... 
Ich hoffe damit wird es etwas verständlicher? Soll ich irgendwie Screenshots oder ein Video von bestimmten Einstellungen hochladen (von welchen) hochladen um mein Problem anschaulicher zu machen?
Viele Grüße
Morian Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
FM2293
Mitglied

Beiträge: 93
Registriert: 02.01.2019 Creo Parametric 3.0 M130
|
erstellt am: 13. Jul. 2021 08:19 <-- editieren / zitieren --> Unities abgeben: Nur für Mondros
|
BergMax
Moderator
Dipl.-Ing. (FH)
Beiträge: 2346
Registriert: 23.08.2005 Creo 8.0.3.0
Creo 10.0.9.0
GT/SUT 8 und 11
HP z440, Quadro K2200, Win11 Enterp.
DualView
|
erstellt am: 13. Jul. 2021 10:58 <-- editieren / zitieren --> Unities abgeben: Nur für Mondros
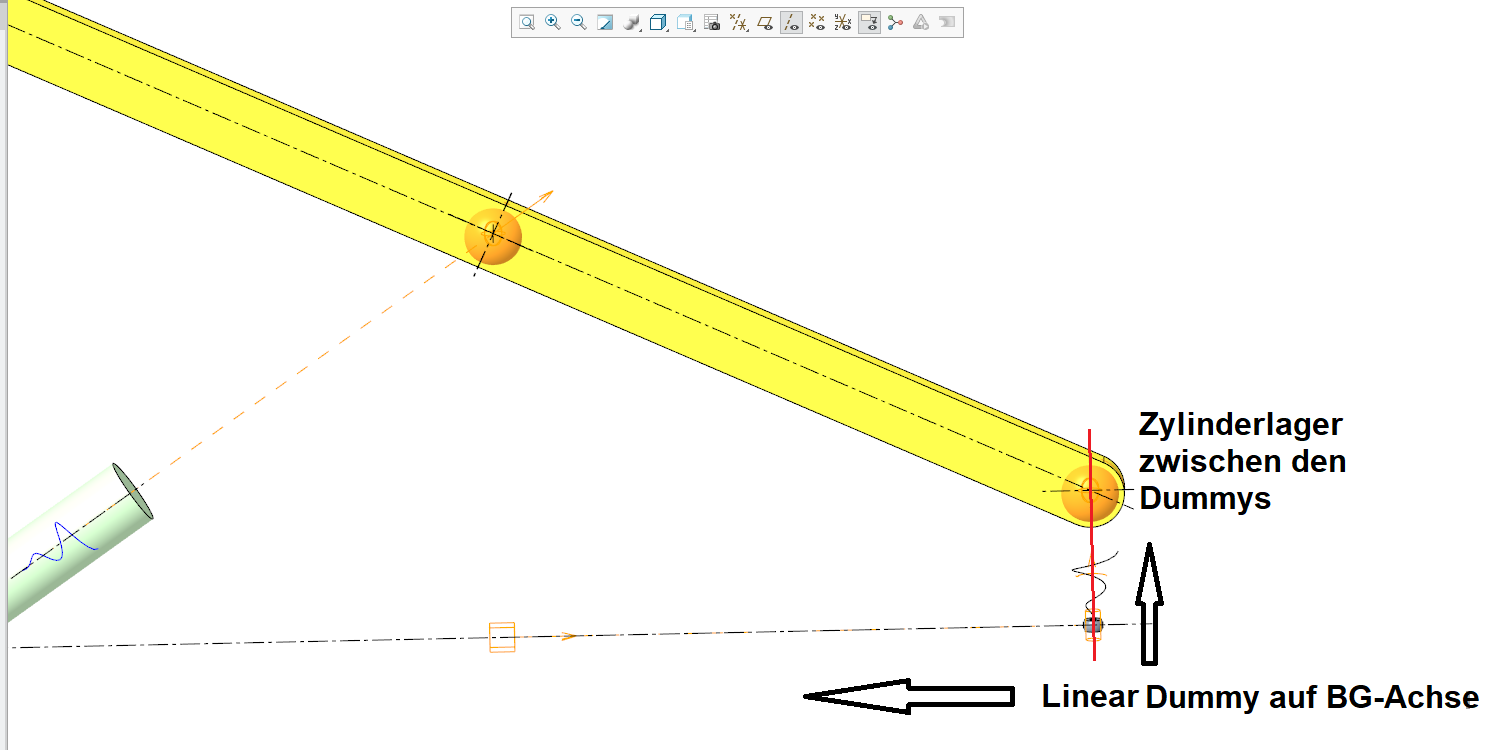
Moin, da muss man das Modell etwas umstellen und braucht zwei/drei Dummy-Parts. Im Zylinder wird eine konstante Kraft (ausfahren) definiert. Mit einem Motor "ziehst" du jetzt außen am Hebel von oben nach unten und misst die Kraft, die dazu notwendig ist. Dabei aber die Dynamik nicht vegessen. Schön langsam ziehen, je langsamer, je genauer. Ich habe das Modell von FM2293 mal umgebaut. Ist jetzt aber Creo 4. ------------------
Beste Grüße
Max
[Diese Nachricht wurde von BergMax am 13. Jul. 2021 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mondros
Mitglied
Maschinenbauingenieur
Beiträge: 8
Registriert: 05.07.2021 Creo Parametric 4.0 M110
|
 erstellt am: 14. Jul. 2021 10:28 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 14. Jul. 2021 10:28 <-- editieren / zitieren --> Unities abgeben:
Moin,
vielen dank für das Beispiel, damit werde ich mal etwas rumprobieren. 
Ist es in diesem fall egal, dass 4 FG und 1 Redundanz über bleiben? Ich bin bis jetzt davon ausgegangen das beide null sein sollten um möglichst exakte Analyseergebnisse zu erhalten. Wie anfällig ist Creo da? Viele Grüße
Morian Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
BergMax
Moderator
Dipl.-Ing. (FH)
Beiträge: 2346
Registriert: 23.08.2005 Creo 8.0.3.0
Creo 10.0.9.0
GT/SUT 8 und 11
HP z440, Quadro K2200, Win11 Enterp.
DualView
|
erstellt am: 14. Jul. 2021 13:50 <-- editieren / zitieren --> Unities abgeben: Nur für Mondros
Moin, Freiheitsgrad sollte hier eigentlich nur einer sein, da nur eine freie Bewegung möglich ist, bzw sein sollte. Dieser FG wird aber dann durch den Servomotor "vernichtet". Der Servomotor legt ja die Position des Hebels fest - Endergebnis wäre Null Freiheitsgrade. Die hohe Anzahl an Freiheitsgraden liegt hier an den Kugel-Dummys, die sich teils noch rotatorisch bewegen können. Der im Mittelloch hat drei FG, der vorne einen. Das ist aber unkritisch. Redundanzfrei sollte das System nach Möglichkeit sein. Aber es kommt auch darauf an, was man wo messen will und ob die Redundanzen dabei stören - wenn man denn weiß, wo sie herkommen...  Ich habe hier den einen Dummy mit einem Schubgelenk eingebaut. Mach aus dem Schubgelenk einfach ein Zylinderlager und dann ist das Modell Redundanzfrei. ------------------
Beste Grüße
Max [Diese Nachricht wurde von BergMax am 14. Jul. 2021 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de