| | |  | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für Autodesk Produkte | | | |  | SMW-Autoblok baut in der Konstruktion auf SolidWorks und Phoenix/PDM , ein Anwenderbericht
|
|
Autor
|
Thema: Freilaufsimulation (4035 mal gelesen)
|
Manta-Hai
Mitglied

   Beiträge: 52
Registriert: 06.05.2009 Inventor Pro 2015
Lenovo W530
|

 erstellt am: 10. Okt. 2014 16:26
erstellt am: 10. Okt. 2014 16:26  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo, da ich schon seit langem eine Möglichkeit suche einen Freilauf bzw. mehrere Freiläufe in einem Getriebekonzept in Inventor zu simulieren, es aber leider keine direkte Freilaufdefinition gibt, habe ich mich mal selbst drangemacht. Ich habe einen Sperrklingenfreilauf gebaut, der aber einen sehr geringen Schaltweg von 3 Grad besitzt. Die Simulation ist nicht perfekt, weswegen ich hier zur Mitarbeit anregen möchte! Wenn ihr eigene Konzepte habt, hochladen oder ihr verbessert einfach meine Simulation. Viele Grüße Michael  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jupa
Ehrenmitglied V.I.P. h.c.
Ruheständler
Beiträge: 6052
Registriert: 16.09.2004 Inventor Prof. bis 2022
|
 erstellt am: 10. Okt. 2014 18:15 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai
erstellt am: 10. Okt. 2014 18:15 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai 
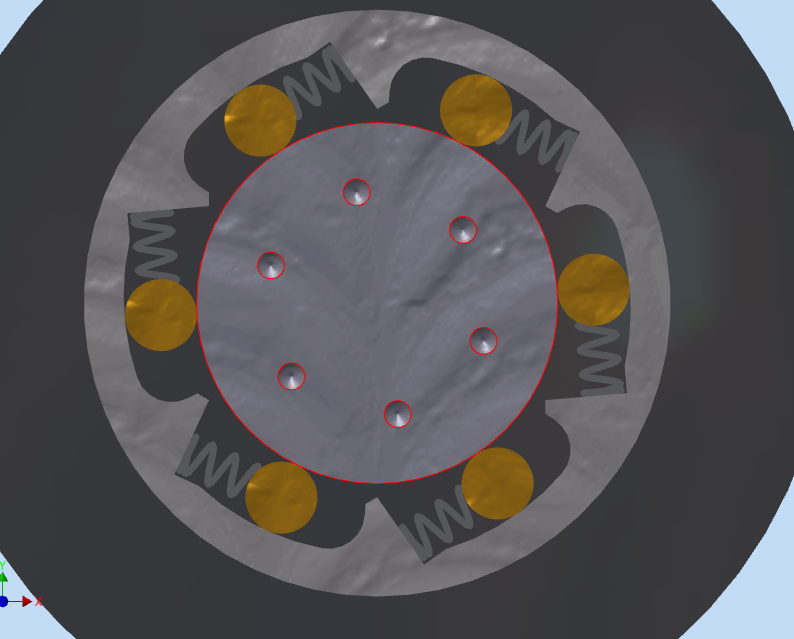
Angeregt durch Deine PM von vor paar Tagen hatte ich mal ein Prinzipmuster eines Klemmrollenfreilaufes erstellt. (hier angefügte BG wurde mit IV 2015 erstellt). Für einen (von mit nicht getesteten) Sperrklinkenfreilauf hatte ich Dir ja einen Link geschickt. Mir ging es bei der hier angefügten Baugruppe weniger um eine realitätsgeteue Konstruktion (Abmessungen?) als vielmehr darum, die Möglichkeiten und Grenzen der Dynamischen Simulation auszutesten. Das vorgestellte Modell ist also nur als Prinzipmuster zu sehen. Bild FL-komplett zeigt den vollständigen Zusammenbau. (Die Federn sind natürlich nicht modelliert, das sind die aus der DS stammenden Federgelenke.)
Der innere Zylinder ist der Antrieb, entgegen dem Uhrzeigersinn. Der Raum für die Klemmrollen verjüngt sich in Entlastungsrichtung der Federn, die Rollen werden also - wenn sich der Antrieb schneller bewegt als der Abtrieb in einen "Keil" gedrückt und nehmen aufgrund der Reibung den Abtrieb mit. Bewegt sich der Antrieb langsamer als der Abtrieb, werden die Klemmrollen freigegeben und der Abtrieb kann den Antrieb "überholen".
Die im vorliegenden Modell verwendeten Werte für Klemmwinkel und Reibungswert sind nicht sehr realitätsnah (siehe oben), können aber über die jeweiligen Parameter beliebig verändert werden, um die Wirkungsweise unter verschiedenen "Betriebsbedingungen" simulieren und testen zu können.
Und da bin ich beim Hauptproblem - so eine Simulation über ca. 2,5 Antriebsumdrehungen wie im Video (Abtrieb dreht noch ein wenig nach) rechnet mehrere Stunden. Und dabei habe ich für die Simulation den Mechanismus schon auf nur zwei Klemmrollen reduziert. (Bei voller "Bestückung" war eine Rechenzeit von mehreren Wochen abzuschätzen, das habe ich nach ca. 24 Std. abgebrochen). Für "Variantenuntersuchungen" muß man also schon ein wenig Zeit mitbringen.  Im angehängten Video (Freilauf-4.mp4) ist aber gut zu erkennen, daß das Prinzip von der DS beherrschbar ist. Im Diagramm sind die Geschwindigkeiten des Antriebes (hoch auf 720, dann abfallend auf 360, bevor der Abrieb auf diese Drehzahl runter ist noch mal hoch auf 900 und nach knapp 1,5 sek völliger Stillstand) und des Abriebes zusätzlich dargestellt - der Abtrieb (blaue Kurve) wird vom Antrieb "mitgenommen" oder läuft "austrudelnd" nach, so wie es sein soll. Als eine erste Anregung zum "Selberbasteln" ist die beigefügte Baugruppe hoffentlich hilfreich. Noch ein Hinweis: In der DS ist zu sehen, daß ich nicht so recht wußte, ob für den Klemm-Mechanismus ein 2D- oder 3D-Kontakt besser geeignet ist. Da ich dem 3D-Kontakt nicht so recht über den Weg traue (welche Werte für Steifigkeit und Dämpfung spiegeln das reale Verhalten am besten wieder) habe ich mich zunächst für den 2D-Kontakt entschieden (Rückstoßkoeffizient und Reibung sagen mir eher zu ) und die Ergebnisse sprechen für sich.
Wer Zeit, Lust und einen entsprechend leistungsstarken Rechner (und freie Rechnerzeit) hat kann ja auch mal mit 3D-Kontakt testen und berichten. Kritische Anmerkungen sind willkommen. Jürgen
------------------
Bildung kommt nicht vom Lesen, sondern vom Nachdenken über das Gelesene. (Carl Hilty)
[Diese Nachricht wurde von jupa am 10. Okt. 2014 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jupa
Ehrenmitglied V.I.P. h.c.
Ruheständler
Beiträge: 6052
Registriert: 16.09.2004 Inventor Prof. bis 2022
|
erstellt am: 10. Okt. 2014 18:57 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai
Zitat:
Original erstellt von Manta-Hai:
Die Simulation ist nicht perfekt,
Ein und demselben Drehgelenk (Drehen:3) sowohl ein Drehmoment als auch einen Drehzahl-(Geschwindigkeits-)verlauf aufzuzwingen kann nicht so recht funktionieren. Mein Vorschlag: Dem antreibenden Element eine Drehgeschwindigkeit oder ein Drehmoment als Eingangsgröße zuweisen, das angetriebene Element hingegen irgendwie "bremsen" (Dämpfung oder Reibung oder ...). Da fehlt noch was.
[EDIT]Text gelöscht Jürgen ------------------
Bildung kommt nicht vom Lesen, sondern vom Nachdenken über das Gelesene. (Carl Hilty) [Diese Nachricht wurde von jupa am 10. Okt. 2014 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 11. Okt. 2014 00:40
- Inhaltsloser Beitrag - |
jupa
Ehrenmitglied V.I.P. h.c.
Ruheständler
Beiträge: 6052
Registriert: 16.09.2004 Inventor Prof. bis 2022
|
erstellt am: 11. Okt. 2014 07:34 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai
Zitat:
Original erstellt von VORTEX59:
Ist das Drehmoment größer als das Lastmoment schließt der Freilauf.
Hallo Namensvetter, Das sehe ich nicht ganz so. In dem von Dir beschriebenen Kontext (aus dem Stillstand heraus beschleunigen) ist mag das stimmen. Es sind aber auch Betriebszustände denkbar, wo der Freilauf trotz Antriebsmoment größer als Lastmoment dennoch nicht "greift". Wesentlich(er)en Einfluß auf das Schließen des Freilaufes hat die Drehzahldifferenz der beiden Komponenten. Dreht der Antrieb langsamer als der Abtrieb, löst der Freilauf (unabhängig vom anliegenden Drehmoment), ist die Differenz 0 nimmt er mit, ist der Antrieb schneller als der Abtrieb - dieser Zustamnd sollte eigentlich gar nicht auftreten (außer in dem kurzen Moment des "Durchrutschens", bis die Kupplung greift). Auch die Federsteife/Dämpfung und natürlich die Reibungswerte in Kombinationmit dem "Keilwinkel" haben Einfluß - also viele Parameter zum variieren. Ich habe übrigens lange darüber nachgedacht, wie ich die "Last" simuliere.
- Einfach ein konstantes Drehmoment entgegen der Antriebsrichtung? Das hätte zur Folge, daß sich das angetriebene Element bei Rückwärtsbewegung des Antriebes ebenfalls rückwärts in Bewegung setzt. (Radfahrer steht an der Kreuzung, dreht die Pedale rückwarts und das Fahrrad setzt sich rückwärts in Bewegung? Das möchte ich nicht ).
- Eine hohe Radialbelastung auf den Abtrieb wirken lassen und dem Drehgelenk eine Reibung zuweisen. Wählt man diese "Brems-"Kräfte gering, wird sich der Abtrieb bei stehendem Antrieb nur sehr geringfügig verlangsamen. Es käme zwar den realen Verhältnissen wohl am nächsten (wenn's einmal rollt dann rollt's), aber so viel Rechnerzeit wollte ich nicht opfern. Wählt man die "Brems-"kräfte
höher (z.B. großer Reibradius, wie eine alte Stempelbremse), fährt man die ganze Zeit mit konstant angezogener Bremse. Die "Last" nun auch realitätsnah über ein Eingabediagramm zu simulieren war mir (in diesem Stadium des Austestens) zu viel Aufwand. Habe mich deshalb für einen Kompromiß entschieden und dem Drehgelenk des Abtriebes einfach eine (empirisch gewählte) Dämpfung verpaßt. Je höher die Drehzahl, desto stärker die "Brems-"kraft, wie beim richtigen Radfahren (Luftwiderstand).
Da kann man noch viel experimentieren ... Zu bedenken ist auch, a.
b.
...
h.
Hier kann ich nicht mehr folgen 
Jürgen
------------------
Bildung kommt nicht vom Lesen, sondern vom Nachdenken über das Gelesene. (Carl Hilty)
[Diese Nachricht wurde von jupa am 11. Okt. 2014 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Manta-Hai
Mitglied
Beiträge: 52
Registriert: 06.05.2009 Inventor Pro 2015
Lenovo W530
|
erstellt am: 12. Okt. 2014 13:22 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von jupa:
Ein und demselben Drehgelenk (Drehen:3) sowohl ein Drehmoment als auch einen Drehzahl-(Geschwindigkeits-)verlauf aufzuzwingen kann nicht so recht funktionieren. Mein Vorschlag: Dem antreibenden Element eine Drehgeschwindigkeit [b]oder ein Drehmoment als Eingangsgröße zuweisen, das angetriebene Element hingegen irgendwie "bremsen" (Dämpfung oder Reibung oder ...). Da fehlt noch was.
[EDIT]Text gelöscht Jürgen [/B]
Warum ?  ein Antrieb hat doch auch immer ein Drehmoment und eine Drehzahl... Außerdem muss ich bei meinem Modell ja irgendwie die Federkraft überwinden. ein Antrieb hat doch auch immer ein Drehmoment und eine Drehzahl... Außerdem muss ich bei meinem Modell ja irgendwie die Federkraft überwinden. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jupa
Ehrenmitglied V.I.P. h.c.
Ruheständler
Beiträge: 6052
Registriert: 16.09.2004 Inventor Prof. bis 2022
|
erstellt am: 12. Okt. 2014 16:22 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai
Hallo Michael, also das mit dem Drehzahl und Drehmoment an einem Gelenk vorgeben muß ich mir noch mal durch den Kopf gehen lassen. Habe ich bisher nie gemacht und ergibt für mich auch erst mal wenig Sinn. Aber ich gucke mir das noch mal an. Zu meinem Lösungsvorschlag:
Ich habe an/mit Deiner Baugruppe ein wenig rumgespielt (Achtung! Geänderte Teiledateien wurden mit altem Namen gespeichert. Also die Dateien aus dem beigefügten .zip nehmen).
Erst mal: Ungünstig sind immer scharfkantige (Punk-/Linien-)Kontakte. Habe daher dem Keil und auch den kleinen Anschlagflächen des Außenringes jeweils einen kleinen Radius verpaßt. (Im Prinzip müßte es auch mit Deinen Originalteilen funktionieren, habe damit aber schlechte Erfahrungen gemacht und wollte erst mal potentielle Störenfriede ausklammern).
Dann schau Dir in der DS an, wie ich die Gelenkeigenschaften eingestellt habe:
Antrieb (der Innenring): Hier muß (sollte?) man sich entscheiden, ob man als Eingangsgröße die Drehzahl, das Antriebsmoment oder (so wie ich es gemacht habe) die Position als Funktion der Zeit vorgibt. Das Teil wird bei mir um 90° vorwärts (im Uhrzeigersinn) gedreht (und sollte dabei den Außenring mitnehmen :zwinker  . Dann bleibt der Antrieb eine Weile stehen (Radfahrer muß Luft holen ), der Außenring sollte sich (auf Grund der Massenträgheit oder zusätzlicher äußerer Kräfte weiter drehen und dabei evtl. durch Reibungsverluste o.ä. verlangsamen. Dann wird sogar mal ein wenig rückwärts gedreht (um eine günstige Pedalstellung für den nächsten Antritt zu bekommen ), und dann noch ein Mal kräftig für 'ne halbe Umdrehung kräftig reingetreten. Beim dann folgenden austrudeln habe ich abgebrochen. Diesen Verlauf der Antriebes habe ich über das Eingabediagramm vorgegeben. . Dann bleibt der Antrieb eine Weile stehen (Radfahrer muß Luft holen ), der Außenring sollte sich (auf Grund der Massenträgheit oder zusätzlicher äußerer Kräfte weiter drehen und dabei evtl. durch Reibungsverluste o.ä. verlangsamen. Dann wird sogar mal ein wenig rückwärts gedreht (um eine günstige Pedalstellung für den nächsten Antritt zu bekommen ), und dann noch ein Mal kräftig für 'ne halbe Umdrehung kräftig reingetreten. Beim dann folgenden austrudeln habe ich abgebrochen. Diesen Verlauf der Antriebes habe ich über das Eingabediagramm vorgegeben.
Dem Abtrieb (Last) habe ich nur eine Dämpfung zugeweisen, damit er sich bei "kein Antrieb" auch verlangsamt. Hier sind natürlich dem Einfallsreichtum keine Grenzen gesetzt. Kommt eben darauf an, was man eigentlich simulieren möchte (Könnte z.B. auch ein Lastmomentverlauf über die Zeit sein) Bemerkung: Gelegentlich kommt es während der Simulation zu "Störungen" (verschiedenste Fehlermeldungen). Da kann/muß man mit den Parametern ein wenig experimentieren (Eingangsparameter wie Reibung, Dämpfung, Eigenschaften der 2D-Kontakte usw. im Rahmen des prakisch zulässigen ändern, die Schrittanzahl bei der Berechnung der Simulation ändern usw. Das hat mich hier die meiste Zeit gekostet). Ein halbwegs brauchbares Resultat einer solchen Animation ist in beigefügter .mp4 zu sehen. Die verwendeten Daten können der gezippten Baugruppe entnommen werden. Die zwei Spuren habe ich in meiner Baugruppenvariante übrigens gelöscht. Dafür habe ich keine Verwendung gefunden. Gruß
Jürgen ------------------
Bildung kommt nicht vom Lesen, sondern vom Nachdenken über das Gelesene. (Carl Hilty) [Diese Nachricht wurde von jupa am 12. Okt. 2014 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jupa
Ehrenmitglied V.I.P. h.c.
Ruheständler
Beiträge: 6052
Registriert: 16.09.2004 Inventor Prof. bis 2022
|
erstellt am: 12. Okt. 2014 16:57 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai
Noch mal kurz zum Thema Drehmoment und Drehzahl gleichzeitig vorzugeben: Schlicht und einfach - das bringt nix. Wenn man eines von beiden definiert, wird das andere automatisch berechnet, wenn beide gleichzeitig vorgegeben werden, macht die DIVA  was sie will (und das ist naturgemäß nicht das, was der Anwender wollte). Bei mir hatte immer die Bewegungsvorgabe das Primat, das Moment wurde stets ignoriert). Ich lasse mich aber gern durch Gegenbeispiele eines Besseren belehren. Jürgen ------------------
Bildung kommt nicht vom Lesen, sondern vom Nachdenken über das Gelesene. (Carl Hilty) [Diese Nachricht wurde von jupa am 12. Okt. 2014 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jupa
Ehrenmitglied V.I.P. h.c.
Ruheständler
Beiträge: 6052
Registriert: 16.09.2004 Inventor Prof. bis 2022
|
erstellt am: 14. Okt. 2014 14:13 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai
Hier noch ein klassischer Sperrklinkenfreilauf mit 18 Zähnen. Für alle, die kein IV 2015 haben zum Trost wenigstens ein Video. (Bei der Kompression auf eine halbwegs vertretbare Dateigröße hat leider die Qualität etwas gelitten. Die Original-avi ist knapp 1GB groß  ). Jürgen ------------------
Bildung kommt nicht vom Lesen, sondern vom Nachdenken über das Gelesene. (Carl Hilty) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Michael Puschner
Moderator
Rentner
    

Beiträge: 13006
Registriert: 29.08.2003 Toshiba Encore mit MS Office
Ein Programm sollte nicht nur Hand und Fuß, sondern auch Herz und Hirn haben.
(Michael Anton)
|
erstellt am: 14. Okt. 2014 21:55 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai
Zitat:
Original erstellt von jupa:
... das Moment wurde stets ignoriert ...
Nein, ignoriert wird es keinesfalls. Es beeinflusst nur die Bewegung nicht, denn diese wurde ja vorgegeben. Ein zusätzliches Moment beeinflusst aber das Antriebsmoment der vorgegebenen Bewegung. Wirkt das zusätzliche Drehmoment dem Antrieb entgegen, steigt das Antriebsmoment. Bei gleicher Richtung unterstützt es den Antrieb, das Antriebsmoment sinkt also, es sei denn das zusätzliche Drehmoment ist größer als das notwendige Antriebsmoment, dann kehrt das Antriebsmoment die Richtung und muss "bremsen". Das Antriebsmoment ist also zu jedem Zeitpunkt unter Berücksichtigung aller weiteren Momente (auch z.B. Reibung, Federkonstante, Trägheit, Schwerkraft) immer genau so groß, dass die vorgegebene Bewegung durchgeführt werden kann. Bei linearen Freiheitgraden gilt das selbstverständlich analog auch für Kräfte und die Antriebskraft.
------------------
Michael Puschner
Autodesk Inventor Certified Expert
Autodesk Inventor Certified Professional
Mensch und Maschine Scholle GmbH Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jupa
Ehrenmitglied V.I.P. h.c.
Ruheständler
Beiträge: 6052
Registriert: 16.09.2004 Inventor Prof. bis 2022
|
erstellt am: 15. Okt. 2014 09:51 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai
Zitat:
Original erstellt von Michael Puschner:
Nein, ignoriert wird es keinesfalls.
Na endlich meldet sich auch unser DS-Spezi , habe schon gedacht Du seist im Urlaub.
Danke für die Korrektur bzw. Richtigstellung. Ich hab's im Hinterkopf gespürt, daß da was nicht stimmt ... Jürgen ------------------
Bildung kommt nicht vom Lesen, sondern vom Nachdenken über das Gelesene. (Carl Hilty) [Diese Nachricht wurde von jupa am 15. Okt. 2014 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
| Anzeige.:
Anzeige: (Infos zum Werbeplatz >>)
 |

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|