| | |  | Schnell, effizient und günstig: Mit der Kisters 3DViewStation 3D Arbeits- und Reparaturanleitungen einfach erstellen und pflegen, eine Pressemitteilung
|
|
Autor
|
Thema: Fliehkraft und Rotation (4142 mal gelesen)
|
roachnbua
Mitglied
Student

   Beiträge: 25
Registriert: 27.01.2015 SIMULIA/ABAQUS
|

 erstellt am: 27. Jan. 2015 14:50
erstellt am: 27. Jan. 2015 14:50  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo zusammen. Ich beschäftige mich seit einiger Zeit mit Abaqus und habe folgendes Problem. Ich muss ein rotationssymmetrisches Bauteil im Start simulieren und muss daher das Bauteil vom Stand aus beschleunigen. Wichtig ist dabei, dass die Fliehkraft mit modelliert wird. Versucht habe ich es schon mit der Funtkion "rotational body force", wo die Drehzahl, mit Hilfe der Amplitude, variiert und somit dem Bauteil indirekt auch eine Beschleunigung zugewiesen werden kann. So habe ich den Elektorstarter modelliert. Soweit so gut. Aber auf mein Bauteil wirken außen auch noch Kräfte. Diese zusätzliche Beschleunigung bedeutet noch höhere Fliehkräfte, aber diese werden jetzt, wenn ich die Kräfte anbringe, nicht konkret modelliert. Bringt Abaqus die Fliehkräfte, resultierend aus den Zusatzkräften, automatisch auf? Ich habe es modelliert und laut Spannungen geschieht das nicht. Wie könnte ich dieses Problem lösen? Kann ich mir eine Drehung, die ich mit "rotational body force" modelliert habe, anzeigen lassen unter "results"? Danke und Gruß,
Kev Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mustaine
Ehrenmitglied V.I.P. h.c.
Beiträge: 3585
Registriert: 04.08.2005 Abaqus
|
erstellt am: 27. Jan. 2015 17:45 <-- editieren / zitieren --> Unities abgeben: Nur für roachnbua 
Die Rotationsgeschwindigkeit bei Rotational Body Force ist eine Vorgabe vom Anwender. andere äußere Lasten ändern nichts an dieser Geschwindigkeit. Wenn du die Veränderung jedoch vorher schon weißt, kannst du sie ja über eine Amplitude mit vorgeben. [Diese Nachricht wurde von Mustaine am 27. Jan. 2015 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
roachnbua
Mitglied
Student
Beiträge: 25
Registriert: 27.01.2015 SIMULIA/ABAQUS
|
erstellt am: 28. Jan. 2015 08:32 <-- editieren / zitieren --> Unities abgeben:
Hallo Mustaine. Schon mal danke für deine Antwort. Also ist die Funktion "Rot Body Force" unabhängig von anderen Kräften zu sehen, soll heißen, ich muss die endgültigen Drehzahlen angeben, da ansonsten die Fliehkräfte nicht mit beachtet werden? So zu sagen, wenn eine Zusatzkraft eine Winkelbeschleunigung des Körpers verursacht, wird durch die Kraft nur das Bauteil hin auf die Kraft belastet, nicht aber zusätzlich durch die Fliehkraft? Ich habe dann noch eine Frage zur Massenträgheit. Wie gehe ich am besten vor, wenn ich für ein Bauteil die Massenträgheit angeben möchte? Denn es steht immer als "note", dass die angegebenen Werte auf jeden Knoten angewendet werden. Aber eigentlich möchte ich, dass die Werte auf das Bauteil gleichmäßig verteilt werden. Ich habe mir dann überlegt, ob es richtig ist, wenn ich die Massenträgheit auf einen RP lege und diesen mit einer kinetik coupling mit der ganzen Oberfläche verbinde. Macht das einen Sinn? Und wie kann ich Massenträgheiten von Bauteilen die nicht mit im Modell sind beachten? Würde es da Sinn machen mit dem RP und einer coupling zu arbeiten? Vielen Dank und schönen Tag.
Kev Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
roachnbua
Mitglied
Student
Beiträge: 25
Registriert: 27.01.2015 SIMULIA/ABAQUS
|
erstellt am: 28. Jan. 2015 13:10 <-- editieren / zitieren --> Unities abgeben:
Ich habe nochmals eine Frage. Ich bringe auf mein Bauteil außerdem ein Moment auf, das mir dann auch eine Dehnung/Spannung in die radiale Richtung ergibt. Das müsste doch dann der gleiche Effekt sein wie bei der Fliehkraft, oder liege ich da falsch? Und wie ist denn der "scale factor" einzuschätzen. Normalerweise ist doch, wenn er 1,2 betragen würde, der Effekt um 20% vergrößert. Denn ich habe das Problem, dass wenn ich die Massenträgheiten und das Moment auf meine Welle definiere, der Scalefaktor bei 0,0005 liegt. Also wird der Effekt extrem verkleinert, weil ansonsten die Darstellung nicht gut ablesbar wäre. Die Werte für Drehmoment und Massenträgheit habe ich aber überprüft und die stimmen, auch die Einheiten. Aber normalerweise dürfte die radiale Dehnung nie so hoch sein. Kann es an der Verwendung der Funktion Amplitude liegen (Einstellung: Total time)? Danke Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Pam Crash
Moderator
Moderator
 
Beiträge: 446
Registriert: 29.04.2008
|
erstellt am: 28. Jan. 2015 18:13 <-- editieren / zitieren --> Unities abgeben: Nur für roachnbua
Beim Hochfahren eines Rotors wirken zwei Volumenkräfte 1) Fliehkräfte (DLOAD Type CENTRIF)
2) Rotationsbeschleunigungskräfte (Type ROTA) Beide Lasten sind in einem Step aufzubringen. Einfache statische Rechnung.
Bei Erreichen der Zieldrehzahl verschwindet 2).
Konstante Beschleunigung angenommen, dürfte die Bauteilbelastung kurz vor Erreichen der max. Drehzahl am größten sein. Insofern Du dein Bauteil geometrisch korrekt abgebildet hast und das Material eine Dichte besitzt wird das Massenträgheitsmoment von Abaqus selbst richtig berechnet. Das zum Beschleunigen benötigte Drehmoment fällt als Berechnungsergebnis (Reaktionsmoment) ab. ------------------
Pam Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
roachnbua
Mitglied
Student
Beiträge: 25
Registriert: 27.01.2015 SIMULIA/ABAQUS
|
erstellt am: 29. Jan. 2015 08:54 <-- editieren / zitieren --> Unities abgeben:
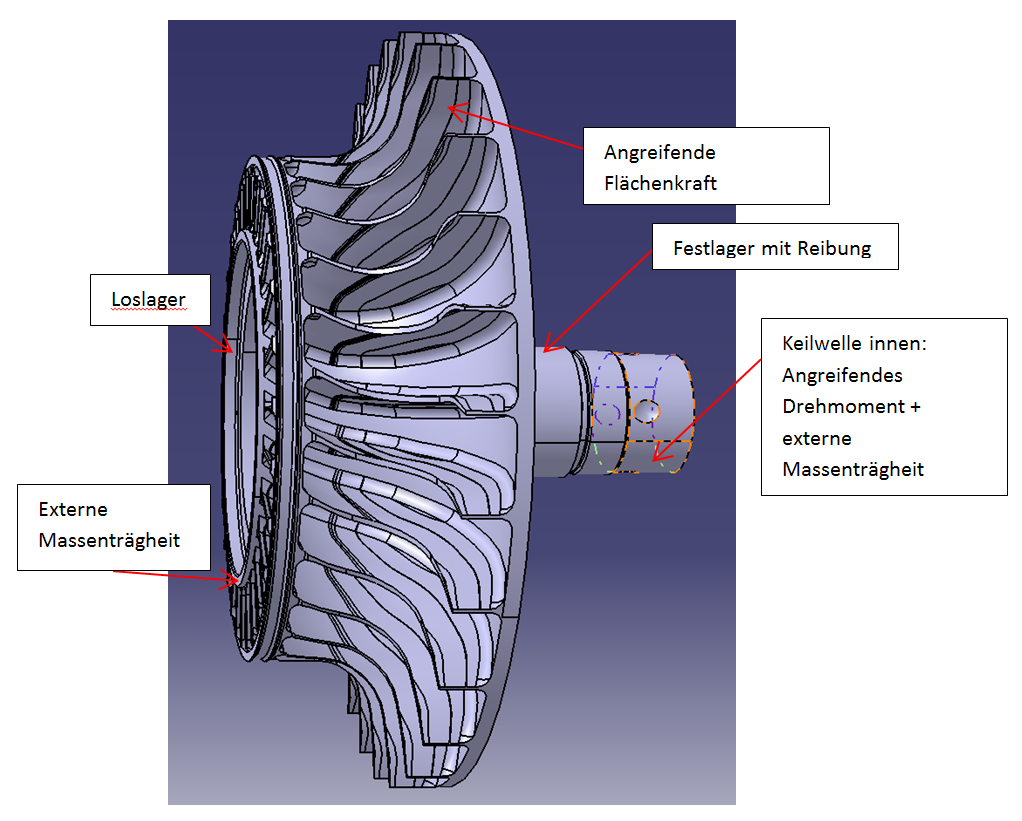
Hallo Pam, schon mal danke für deine Antwort. Ich muss aber sagen das diese mir nicht so viel weiter hilft, denn ich habe nicht das Problem das ich nicht weiß welche Kräfte usw. auftreten usw. sondern eher wie ich das alles modellieren kann und muss (war vorher immer mit Ansys unterwegs und habe so schon Erfahrung in diesem Bereich, aber in Ansys Workbench modelliert man manche Dinge ganz anders). Was ich nicht ganz verstanden habe an deiner Aussage, warum eine statische Analyse ausreicht, wenn ich ein rotierendes Bauteil habe? Denn in den Steps habe ich Dynamic implzit gewählt. 1) Fliehkräfte: Soweit ich jetzt verstanden habe, muss ich die absolute Drehzahl des Radialverdicherts angeben. Ok, aber warum ergibt sich dann wenn ich ein Moment auf den Verdichter aufbringe (Fliehkraft jetzt nicht explizit modelliert) eine radiale Dehnung. Hier dürften dann eigentlich nur Winkelbeschleunigungskräfte, durch die Trägheit, auftreten. Kann die Angabe der absoluten Drehzahl nicht umgangen werden und einfach nur die Drehachse angegeben werden, sodass sich dann Abaqus bei jedem Increment die momentane Drehzahl berechnen kann. Denn ich möchte simulieren, ob mit den auftretenden Kräften, Momenten, Massenträgheiten auch eine Beschleunigung des Verdichters in einer gewissen Zeit möglich ist. 2) Rotationsbeschleunigungskräfte: Zur Beschleunigung tritt ein Moment (innen an der Keilwelle) und eine Kraft auf. Ich kann hier nicht nur die absolute Beschleunigungsrate angeben, da mich gerade die Effekte die durch das Moment und die Kraft entstehen interessieren. Die Frage zum Moment ist ob ich diese über eine Coupling (structural distributing) und einem Referenzpunkt auf die Keilwellenflächen aufbringen kann. Die Frage zur Kraft ist etwas komplizierter und kommt etwas später mal  3) Massenträgheiten: Wenn ich richtig verstanden habe, muss ich die Massenträgheit, wenn die Dichte richtig angegeben wurde, vom Bauteil nicht explizit modellieren, sondern das geschieht von alleine. Ok. Aber wie modelliere ich Massenträgheiten von anderen Bauteilen am besten wenn die auf den Radialverdichter wirken? Kann ich diese wiederum über einen Referenzpunkt auf eine Fläche definieren? 4) Lagerung: Auch diese habe ich über einen Referenzpunkt und eine Coupling (Kinematic) definiert. Die Reibung muss hier genauso modelliert werden. 5) Torsion: durch die auftretenden Massenträgheiten, Kräfte und Momente ist mein Bauteil im Realen sicherlich auch einer Torsionsbelastung ausgesetzt. Ich habe daher probehalber mal einen Stab mit einer externen Trägheit an einem und mit einem Moment am anderen Ende modelliert. So müsste eigentlich eine Torsionsbelastung entstehen, aber in den Ergebnissen war keine Torsion ersichtlich. Woran kann das liegen? Danke für die Antwort, Gruß,
Kev
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mustaine
Ehrenmitglied V.I.P. h.c.
Beiträge: 3585
Registriert: 04.08.2005 Abaqus
|
erstellt am: 29. Jan. 2015 13:19 <-- editieren / zitieren --> Unities abgeben: Nur für roachnbua
Du rechnest transient dynamisch? Das hättest du gleich schreiben sollen. Was willst dann mit der rotational body force? Die Trägheit ergibt sich doch aus der stattfindenden Drehbewegung und muss somit nicht künstlich eingebracht werden. Momente kannst du über Couplings einleiten. Künstliche Massen und Trägheiten die externe Körper repräsentieren kann man zusätzlich anbinden. Steuerknoten, Coupling an Struktur, Masse/Trägheit auf Steuerknoten. Im Interaction-Modul unter Special->Inertia. Reibung in einem Lager kannst du ggf. über einen Connector einbauen. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Pam Crash
Moderator
Moderator
Beiträge: 446
Registriert: 29.04.2008
|
erstellt am: 29. Jan. 2015 13:26 <-- editieren / zitieren --> Unities abgeben: Nur für roachnbua
Du planst, das Problem im Zeitbereich, dynamisch implizit zu untersuchen. Der Rotor selbst würde dabei gedreht werden. Grundsätzlich geht dies, Aufwand und Fehleranfälligkeit sind allerdings riesig. Ich rate ab (ohne Kenntnis aller Hintergründe). Ich habe derartige Probleme schon einige Male gerechnet und empfehle folgende Vorgehensweise: 1) Sofern möglich zyklische Symmetrie nutzen und nur eine Schaufel modellieren.
2) Antriebsachse, Anbauteile etc. modellieren und mit Rotor verbinden (Tie Kontakt o.ä.), Kontakte, Reibung etc.pp.
3) Lagerung, wie geplant, Wichtig: Antriebswelle dort, wo Moment eingeleitet wird fest einspannen.
4) Volumenkräfte (Centrif + Rota) modellieren, Drucklasten auf Schaufel aufbringen (DLOAD Type P)
5) Statisch rechnen, u.u. für verschiedene Drehzahlen. Wichtig: Geometrische Nichtlinearitäten berücksichtigen (wg. des Drucks)
6) Fertig! Zu Deinen Fragen: Ich gehe davon aus, dass Dich die Schwingungen in den Schaufeln nicht interessieren. Eine dynamische Rechnung, die den Faktor Zeit berücksichtigt, ist daher nicht nötig. Eine aufwendige Drehung des Rotors ist ebenfalls nicht nötig. Es ist sehr viel einfacher das angreifende Kraftfeld zu drehen, und das macht Abaqus mit den oben beschriebenen Krafttypen vollautomatisch. Externe Trägheiten sind als Punktelemente verfügbar und können über z.B. kinematische Kopplungen mit der Struktur verbunden werden. Ich bevorzuge volumetrische Ersatzkörper. Gibt schönere Bilder und Animationen. ------------------
Pam Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
roachnbua
Mitglied
Student
Beiträge: 25
Registriert: 27.01.2015 SIMULIA/ABAQUS
|
erstellt am: 29. Jan. 2015 13:53 <-- editieren / zitieren --> Unities abgeben:
Danke für eure Antworten. Ja transient dynamisch. Hätte ich gleich schreiben sollen, sorry habe ich vergessen Ok die Antworten helfen mir diesmal sehr. Die Sache ist, dass mich die Schwingungen interessieren. Jetzt noch habe ich die Kräfte die an den Schaufeln angreifen noch als Druckkräfte modelliert, dies ist allerdings nicht ganz richtig. Am oberen Ende der Schaufeln wird nämlich zur Beschleunigung Pressluft eingedüst (fünf mal am Umfang). Um hier eine gekoppelte und noch sehr viel anfälligere Simulation (Strömungssimulation) zu vermeiden, muss ich mir noch überlegen, wie ich am besten diesen "Luftstrahl" modellieren könnte. Der Verdichter soll nämlich in 2,5 Sekunden auf 30.000 U/min beschleunigt werden und hierbei interessieren natürlich auch die Schwingungen. Bei der Beschleunigung bleibt der Verdichter zwar nie an einer potentiell kritischen Drehzahl, aber wenn möglich möchte ich mir trotzdem das Verhalten im Start anschauen. Mir ist bewusst dass das um einiges aufwändiger ist, aber meines Erachtens wird hier die statische Simulation der Situation nicht ganz gerecht. Sollte ich es nicht so hinkriegen, werde ich auf diese zurückgreifen. Habt ihr vllt eine Idee wie ich den Luftstrahl halbwegs realistisch modellieren könnte. Eine Kopplung mit einer Strömungssimulation soll vermieden werden. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
roachnbua
Mitglied
Student
Beiträge: 25
Registriert: 27.01.2015 SIMULIA/ABAQUS
|
erstellt am: 30. Jan. 2015 15:46 <-- editieren / zitieren --> Unities abgeben:
Ich habe ein Problem mit dem Referenzpunkt über den ich mit einer Coupling (Kinematic) ein Moment auf die Keilwelle legen will. Dabei kommt immer diese Meldung: "Error in job Job: A material point in 1 elements lies on the polar axis. The orientation cannot be defined. Use ORIENTATION,SYSTEM=RECTANGULAR or move the polar axis away from the material point. The elements have been identified in element set ErrElemMatPntPolarAxis." Könnt ihr mir da vielleicht einen Typ geben. Ist bei einer kinematic coupling eigentlich egal wo ich den RP hinlege, also sprich, der RP muss nicht in den Mittelpunkt einer kreisrunden Fläche. Stimmt das so? Danke Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Pam Crash
Moderator
Moderator
Beiträge: 446
Registriert: 29.04.2008
|
erstellt am: 31. Jan. 2015 08:46 <-- editieren / zitieren --> Unities abgeben: Nur für roachnbua
Liegt ein Knoten auf der Z-Achse eines zylindrischen KS dann kann beispielsweise eine Verschiebung in 1- oder 2-Richtung nicht eindeutig beschrieben werden. Die Elimination dieser Freiheitsgrade via kin. Coupling dürfte dann auch schwierig werden und könnte den aufgetretenen Error erklären. Therapie: z.B. betroffene Knoten in kartesischem KS definieren ------------------
Pam Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
roachnbua
Mitglied
Student
Beiträge: 25
Registriert: 27.01.2015 SIMULIA/ABAQUS
|
erstellt am: 02. Feb. 2015 11:09 <-- editieren / zitieren --> Unities abgeben:
Aber Knoten bzw Referenzpunkte kann ich nur im kartesischen System (global) definieren. Eine Auswahlt besteht gar nicht. Nur bei Constraint und Load kann ich das Koordinatensystem auswählen. Das hilft aber nicht. Es tritt immer wieder der gleiche Fehler auf. Und komischerweise nur bei einem der drei Referenzpunkte, und zwar der wo das Moment drauf definiert wurde. Ich habe aber noch eine Frage zu coupling type, denn wenn ich die kinematische Kopplung mit der "structural" ersetze klappt es. Wie unterscheiden sich denn folgende Bedingungen: "kinematic", "continuum distributing" und "structural distributing". Ich habe schon im User Manual geschaut, aber irgendwie ist mir dort die Definition zu schwammig. Könnte ich also wenn ich ein Moment auf einer Fläche angreifen lassen will die Optiion "structural distributing" wählen. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
roachnbua
Mitglied
Student
Beiträge: 25
Registriert: 27.01.2015 SIMULIA/ABAQUS
|
 erstellt am: 09. Feb. 2015 16:39 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 09. Feb. 2015 16:39 <-- editieren / zitieren --> Unities abgeben:
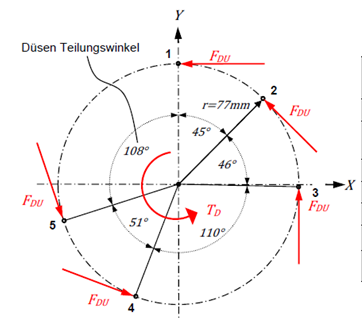
Hallo zusammen, so die meisten Alten Probleme sind fast gelöst. Ich hätte nun aber nochmals eine Frage zu einer Kraftmodellierung. Ich habe schon einige verschiedene Konfigurationen probiert, wie Kraft auf Knoten, Kraft auf Fläche und Druckfeld. Es geht immer noch um den Radialverdichter. Über eine Düse (Bild im Anhang) wird am Radialverdichterausgang Luft auf die Schaufeln eingedüst. Jetzt kann ich natürlich die drei oben genannten Konfigurationen für die Simulation verwenden, die Frage ist nur ob es vielleicht nochmals eine bessere Möglichkeit gibt. Hat da jemand eine Idee wie man das noch besser gestalten könnte, ohne eine Strömungssimulation
Eine Idee hatte ich schon Mal, habe aber keine Ahnung ob sich die umsetzen lässt. Ich dachte mir dass man den Eintrittsquerschnitt der Düse zeichnet und durch diesen Querschnitt "fliegen" dann Kraftvektoren die die Strömung ersetzen. Es geht nämlich darum. Rund um den Radialverdichter sind fünf Düsen angeordnet und je nach Position der Schaufel kann pro Düse nur eine oder auch zwei Schaufeln angeströmt. Das macht logisch einen Unterschied, ist unter Umständen vor allem schwingungstechnisch interessant. Also ist die Krafteinwirkung abhängig von der Position der Schaufel und der Winkelgeschwindigkeit des gesamten Verdichters, denn bei zunehmender Winkelgeschwindigkeit des Verdichters, sinkt die Relativgeschwindigkeit der auftreffenden Strömung auf die Schaufel und somit auch die gesamte Krafteinwirkung.
Ich weiß das ganze ist ein bischen kompliziert, aber dafür interessant  Ich kann zwar bei der Kraft (auf Fläche) auch eine zeitabhängige Amplitude definieren und somit wenn ich die Daten habe auch die sinkende Krafteinwirkung darstellen, mit der Winkelabhängigkeit tue ich mich aber schon schwieriger, denn bei den Kräften muss ich doch eine fixe Fläche anwählen und das ist in Realität anders. Ich kann zwar bei der Kraft (auf Fläche) auch eine zeitabhängige Amplitude definieren und somit wenn ich die Daten habe auch die sinkende Krafteinwirkung darstellen, mit der Winkelabhängigkeit tue ich mich aber schon schwieriger, denn bei den Kräften muss ich doch eine fixe Fläche anwählen und das ist in Realität anders. Ich hoffe ihr konntet das Problem verstehen, sonst dürft ihr natürlich gerne nachfragen  Danke und schönen Tag noch. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
roachnbua
Mitglied
Student
Beiträge: 25
Registriert: 27.01.2015 SIMULIA/ABAQUS
|
erstellt am: 11. Feb. 2015 18:01 <-- editieren / zitieren --> Unities abgeben:
|
Mustaine
Ehrenmitglied V.I.P. h.c.
Beiträge: 3585
Registriert: 04.08.2005 Abaqus
|
erstellt am: 12. Feb. 2015 09:45 <-- editieren / zitieren --> Unities abgeben: Nur für roachnbua
|
| Anzeige.:
Anzeige: (Infos zum Werbeplatz >>)
 |

 Foren auf CAD.de
Foren auf CAD.de



 |
|