Hallo liebe Abaqus-Nutzer,
ich habe mal wieder ein kleines Problem und würde mich über zielführende Hinweise sehr freuen.
Im Rahmen einer Simulation möchte ich eine Halbkugelschale durch einen Stempel mit Druck beaufschlagen.
Die Geometrie entstammt einer CAD Datei und ist bereits in ein Schalenkonstrukt umgewandelt. Hierbei gab es
keinerlei Probleme. Mit diesem Modell kann ich auch rechnen, wenn ich "normale" Lasten, wie Kräfte oder
Flächenlasten aufbringe.
Zur Modellierung des Stempels nutze ich ein "Analytical rigid part", welches als "revolved shell" erstellt wurde und
direkt im Part einen Referenzpunkt zugewiesen bekommen hat (das habe ich aus einem Tutorial, in dem es ausschließlich
um Schalenelemente geht).
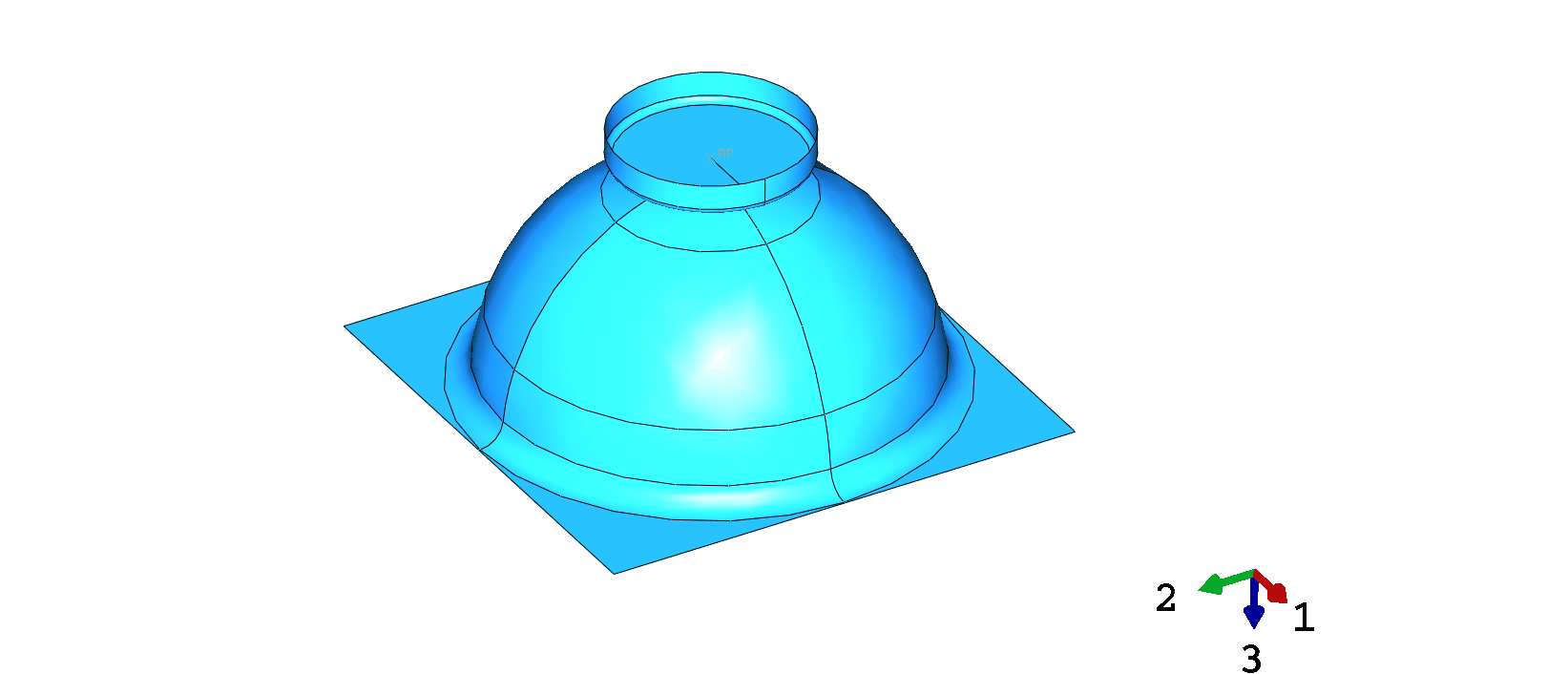
In den angehängten Bildern seht ihr mein Assembly. Der Stempel ist dabei 10mm über der Halbkugel positioniert, damit ich
noch an die Flächen rankomme. Der Kontakt ist als "Surface-to-surface contact" definiert, bei dem die Fläche des Stempels
das Master surface und die Halbkugelflächen die Slave surfaces darstellen. Zudem habe ich "Adjust only to remove overclosure"
gesetzt und eine Interaction property type=Contact mit tangential behavior "frictionless" erstellt.
Der Lastfall sollte zuerst eine weggesteuerte Variante sein. Ich habe als Verschiebungsweg 12mm gewählt, sodass die Oberseite
am Ende um einen Weg von 2mm in x3-Richtung ausgelenkt sein sollte.
Konkret habe ich zwei steps.
Initial: hier ist die Unterseite der Halbkugel komplett festgehalten (u1-u3) und der Referenzpunkt
bekommt ein "encastre" auferlegt.
Step-1: die Unterseite der Halbkugel bleibt festgehalten, aber der Referenzpunkt bekommt nun Null Verschiebung in u1- und u2-Richtung
und die gewünschte Verschiebung in u3-Richtung; das "encastre" wird deaktiviert
Ich nutze den direkten Solver und habe automatisches Inkrementieren angeklickt, wobei ich bei einer step-Zeit von einer Sekunde das Startinkrement
auf 0.1 Sekunden geändert habe.
Soviel zu Modell und Einstellungen.
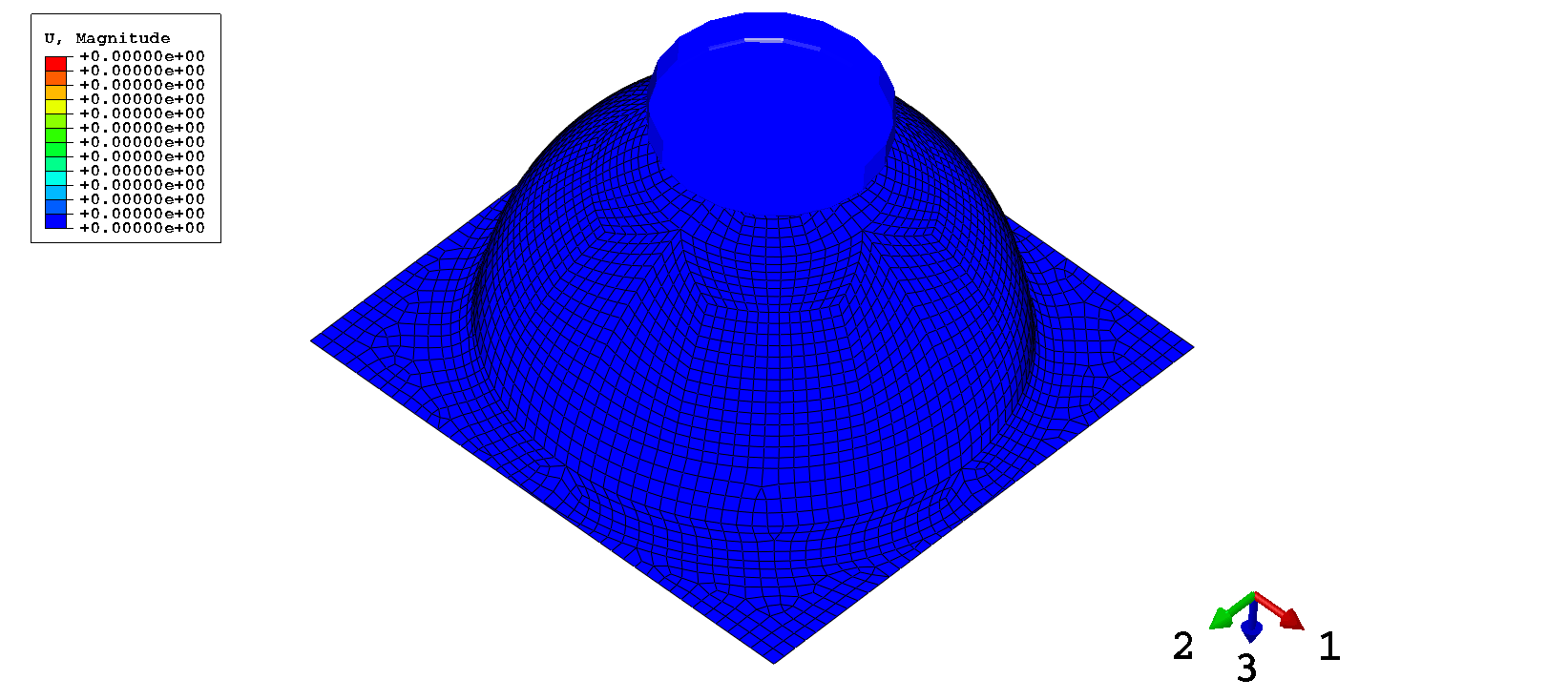
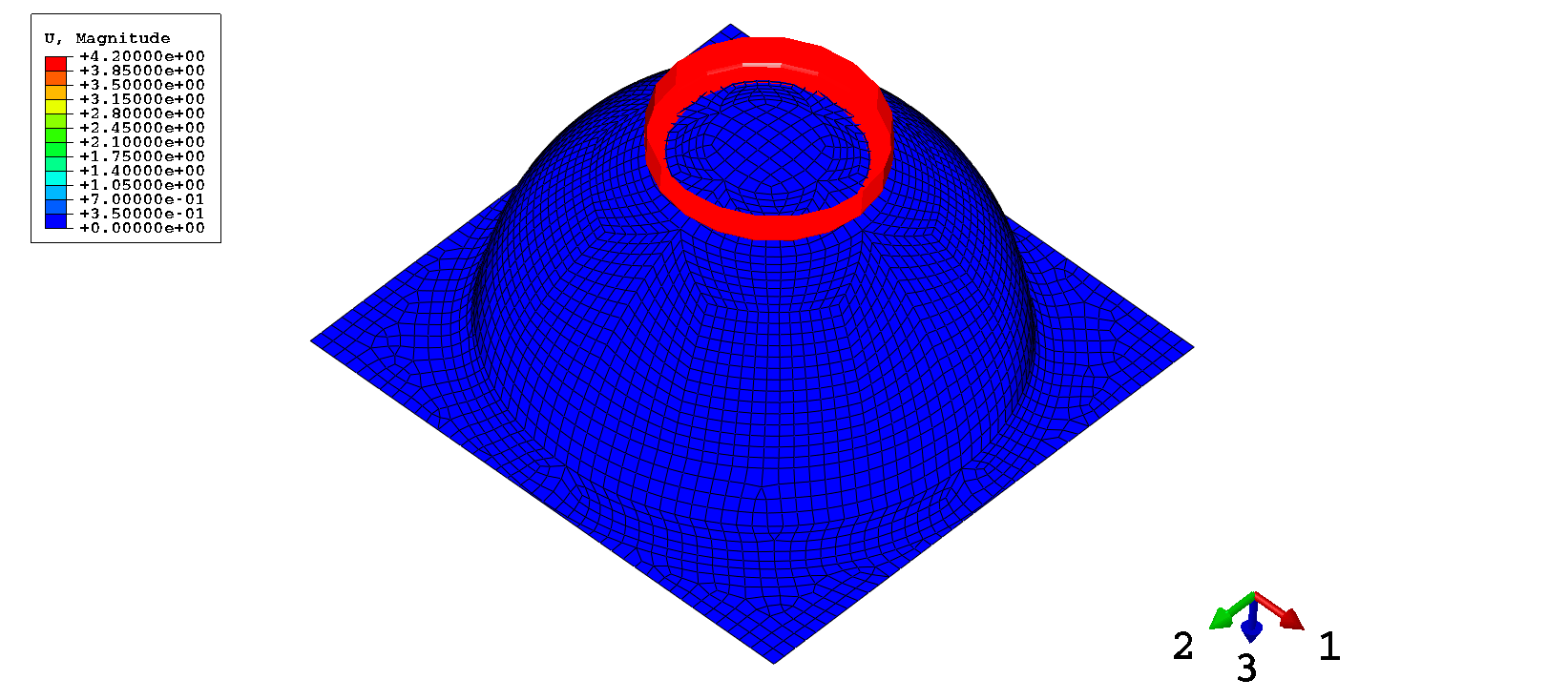
Im Ergebniss erhalte ich ausschließlich eine Verschiebung für das Rigid Part und nichts für die Halbkugel (siehe weitere Bilder).
Offensichtlich funktioniert der Kontakt nicht. Ich habe diesen Kontakt auch schon für ein kleines Modell versucht und auch da klappt das
nicht. Nehme ich zwei deformierbare Teile ist alles in Ordnung. Was mache ich nur falsch bei diesem Analytical Rigid Part???
Hat das jemand schon einmal in 3D gemacht und kann mir meinen (wahrscheinlich dämlichen) Fehler erklären?
Die Beispiele aus dem Handbuch sind meist in 2D und vllt. gibt es einen Unterschied. Die Benchmark Rechnungen laufen auch bei mir, aber
das sind alles inp-files und keine cae-Dateien. Ich wünsche mir schon eine Lösung, die ich im CAE klicken kann.
Ich hoffe, dass mir hier jemand helfen kann und will. Ich bin für alles dankbar.
in diesem Sinne
mfg NxxN
------------------
===============
== Dingsen ==
===============
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|