Guten Morgen zusammen,
meine Aufgabe ist es eine verformbare, zweikomponentige Walze (Guss-Kern und Kunststoff-Belag)in einem ersten Schritt gegen eine unverformbare Fläche (Rigid)zu drücken und diese dann in einem zweiten Schritt mit einem Moment zu belasten.
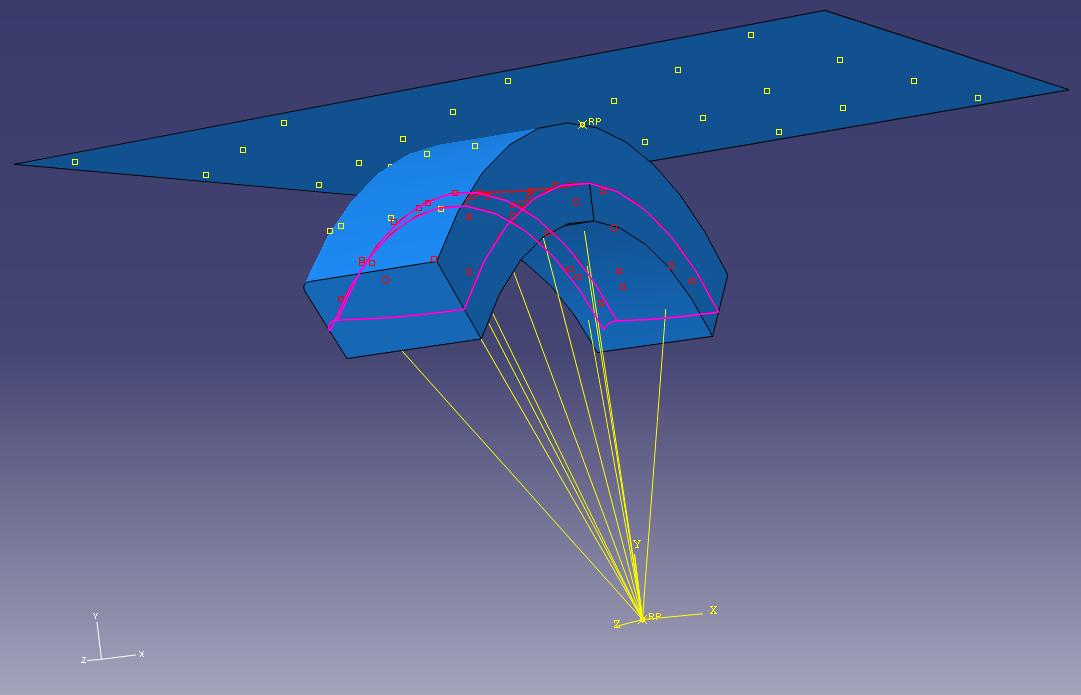
Um Rechenzeit einzusparen wird für die Simulation nur der belastete Walzenausschnitt (ca. 90°) modelliert. Die Belastungen (Concentrated force und Moment)werden auf eine RP im Drehzentrum der Walze aufgebracht und über ein kinematic coupling mit der Innenfläche der Walze verbunden.
Die Berechnung läuft ohne Probleme durch und bringt auch die erwarteten Ergebnisse.
Nun möchte ich durch eine Symmetriebedingung (XSYMM) das Modell weiter vereinfachen und die Rechenzeit weiter verkürzen (Beim Rest des Simulationsmodelles ändert sich nichts). In der beigefügten Abbildung wird das bereits in der Y-Z-Ebene geschnittene Modell dargestellt.
Die Symmetriebedingung sorgt jedoch dafür, dass die Simulation nicht mehr durchläuft und es zu Problemen im Randbereich der Kontaktdefinition und im Randbereich des Couplings (jeweils an der Symmetrieebene) kommt. Folgende Warnungen werden ausgegeben.
***WARNING: DEGREE OF FREEDOM 1 HAS BEEN ELIMINATED AT NODE 389 INSTANCE
P450_440_R6-1-1 BOUNDARY CONDITION TYPE XSYMM MAY NOT BE APPLIED
AT THIS NODE
Ich interpretiere das als Überbestimmtheit der Randknoten der Kontaktbedingung (Tie N2S Kontakt mit Adjustment Zone), wodurch die Symmetriebedingung nicht angewendet werden kann.
Eine weitere Warnung, die durch die Symmetriebedingung hervorgerufen wird, bezieht sich auf die Randknoten der Coupling-Bedingung (Kinematic mit constrained dof 1-6) und lautet wie folgt:
***WARNING: DO NOT CONSTRAIN THE TRANSLATION DEGREE OF FREEDOMS OF NODE 14582
INSTANCE P450_440_R6-2-1 ON THE SLAVE SURFACE
ASSEMBLY_P450_440_R6-2-1_PU_INNEN THAT IS BONDED OR TIED TO THE
MASTER SURFACE ASSEMBLY_P450_440_R6-1-1_RK_AUSSEN. CONSTRAIN THE
MASTER SURFACE NODES INSTEAD.
Diese Warnung gibt mir vor, dass ich unter der gegebenen Symmetriebedingung die translatorischen dof (dof 1-3)nicht einschränken soll. Meines Erachtens nach würde das jedoch zu einer Unterbestimmtheit des Systems führen, was wiederum Probleme bei der Berechnung mit sich bringen würde (Versuche mit freigelassenen dof 1-3 brachten keine Verbesserung bei der Berechnung).
Bei meinen bisherigen Berechnungen mit Abaqus sind vor allem an den Randknoten diverser Randbeindungen schon des Öfteren Probleme mit der Überbestimmtheit der Knoten aufgetreten (Stichwort Zero Pivot).
Könntet ihr euch bitte mal meine INPUT-DAT durchschauen und mir sagen, ob ich bei der Symmetriebedingung irgendetwas Grundsätzliches falsch mache, oder mir ein paar Tipps geben, wie ich die Berechnung trotz Symmetriebedingung zum Laufen bekomme?
Ist bei der Kontaktdefinition zwischen Kunststoff und Guss irgendetwas falsch definiert, oder sind die Fehler hauptsächlich auf das Coupling zurückzuführen? ... oder müssen beide Bedingungen angepasst werden.
Habt ihr mir vielleicht noch weitere Tipps, wie ich die Rechenzeit der Simulation noch weiter heruntersetzen könnte?
Ihr würdet mir sehr weiterhelfen.
Vielen Dank schonmal...
Mit freundlichen Grüßen
Thomas
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|