| | |  | KISTERS 3DViewStation auf der IMTS 2026, eine Veranstaltung am 14.09.2026
|
|
Autor
|
Thema: Kugellagermodell mit Connectoren (2659 mal gelesen)
|
Bonifaz
Mitglied

   Beiträge: 18
Registriert: 21.04.2010
|

 erstellt am: 21. Apr. 2010 13:32
erstellt am: 21. Apr. 2010 13:32  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo zusammen, zu meinem Problem habe ich in der Suche leider nichts passendes gefunden, deshalb mein Beitrag: ich versuche nun schon seit längerem ein Kugellager, das dementsprechend nur einen rotatorischen Freiheitsgrad besitzt, mit Hilfe der Connector-Elemente zu modellieren. Hier möchte ich außerdem einen Reibwert vorgeben, um in einem anderen Modell den Einfluss der Lagerreibung berücksichtigen zu können. Mein Problem ist allerdings, dass bei allen Versuchen, die ich bisher angestellt habe, der rotatorische Freiheitsgrad immer gesperrt bleibt. Also, wenn ich eine Kraft auf eine Scheibe gebe, die in ihrer Rotationsachse drehbar gelagert sein soll, dann dreht sich die Scheibe nicht. In den Anhang habe ich mal die cae gestellt, die ich zum Test aufgebaut habe. Kann mir jemand helfen? Wo ist mein Denkfehler? Vielen dank und viele Grüße, Bonifaz Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
HerrHansen
Mitglied
Dipl.-Ing.
Beiträge: 257
Registriert: 03.12.2005 Abaqus/CAE 6.3 bis 6.12
|
erstellt am: 23. Apr. 2010 09:50 <-- editieren / zitieren --> Unities abgeben: Nur für Bonifaz 
|
Bonifaz
Mitglied
Beiträge: 18
Registriert: 21.04.2010
|
erstellt am: 23. Apr. 2010 13:08 <-- editieren / zitieren --> Unities abgeben:
Hallo, vielen Dank für deine Antwort.
Ich verstehe aber den Unterschied zwischen dem Hinge Connector, den ich gewählt habe, und dem Join+Revolute von dir nicht. In deinem Bild steht ja in Klammern sogar "Hinge", sprich Bewegungen in UR1 Richtung sind zugelassen und alle anderen sind gesperrt. Ich habe es trotzdem mal geändert, aber bewegt hat sich leider nichts  Bin echt ratlos bei der Sache... Gibt es vielleicht einen alternativen Lösungsweg? Gruß,
Bonifaz Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Bonifaz
Mitglied
Beiträge: 18
Registriert: 21.04.2010
|
erstellt am: 25. Apr. 2010 18:28 <-- editieren / zitieren --> Unities abgeben:
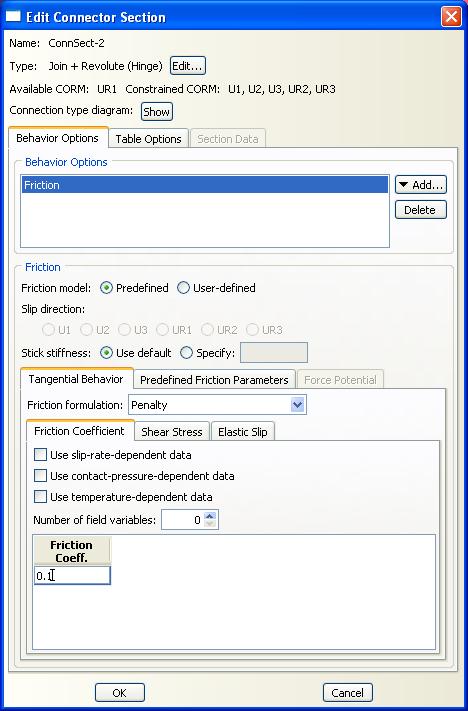
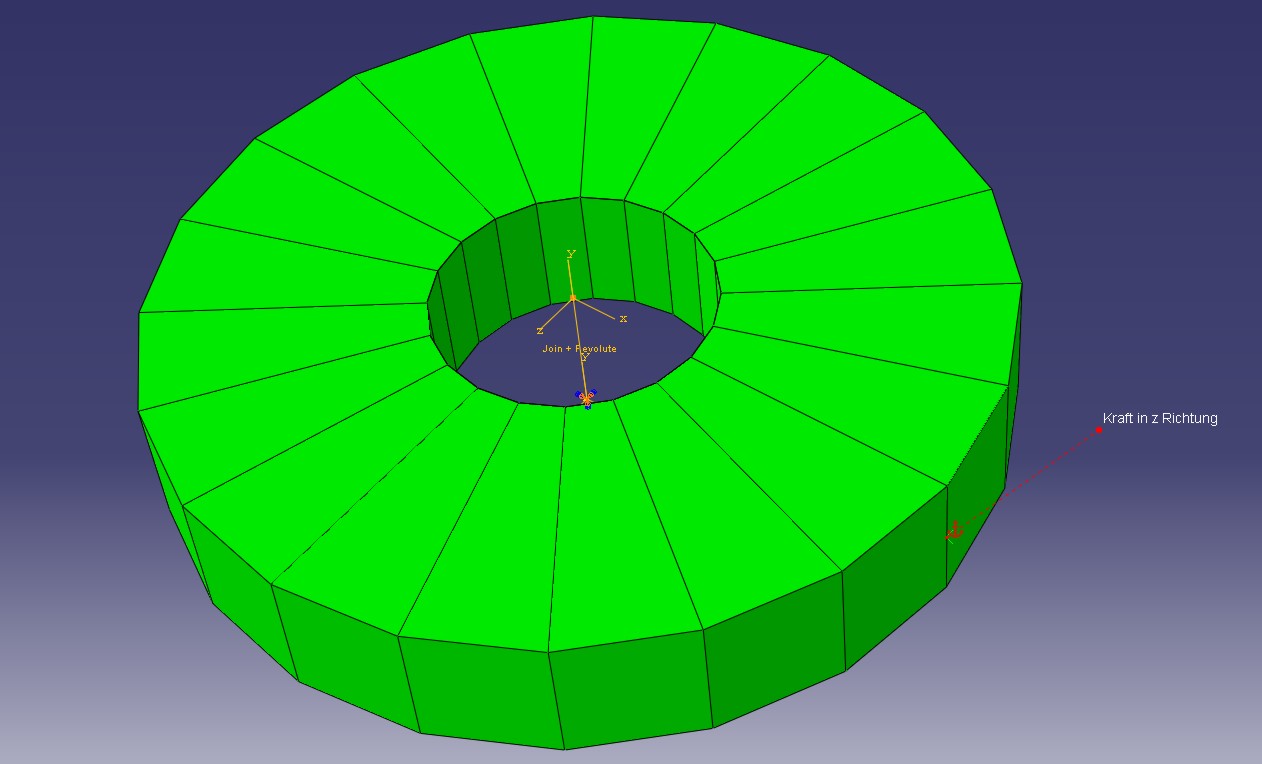
In den Anhang habe ich nochmal ein Bild der Problematik gestellt und ebenso die dazugehörige Input Datei. Die Connector-Einstellungen entsprechen denen im Bild von HerrHansen. Beim Beaufschlagen der Scheibe mit einer tangentialen Kraft, in diesem Fall in negative z-Richtung, bewegt sich die Scheibe leider nicht. Kann mir jemand weiterhelfen?? Viele Grüße, Bonifaz Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
HerrHansen
Mitglied
Dipl.-Ing.
Beiträge: 257
Registriert: 03.12.2005 Abaqus/CAE 6.3 bis 6.12
|
erstellt am: 26. Apr. 2010 08:39 <-- editieren / zitieren --> Unities abgeben: Nur für Bonifaz
So, also ich hab mir dein Modell nochmal intensiv angeschaut. Du hast recht: ich habe mich bzgl. des connector-Typs geirrt. Dein und mein connector machen genau das gleiche (nämlich ur1 unconstrained lassen). Aber:
1. Du hast eine Starrkörperbedingung auf einen Starrkörper gelegt? (Das Bauteil ist ein analytical rigid + ein rigid body constraint)
2. Du hast eine statische Analyse modelliert. Selbst wenn der connector funktionieren würde, behaupte ich, dass der standard-solver aussteigen wird. Einfach deshalb, weil sich durch die Tangentialkraft eine (gleichgewichtslose) Bewegung einstellen wird. @all:
Ich habe das Modell mal etwas modifiziert, indem ich zuerst eine explizite Simulation draus gemacht habe und weiterhin eine initial velocity um den Drehpunkt aufgeprägt habe.
Nach meinem Verständnis müsste doch vr2, also die Rotationsgeschwindigkeit um den Drehpunkt, des Drehpunkts mit der Zeit immer weiter abnehmen. Das ganze natürlich unter der Annahme, dass die Reibung korrekt definiert wurde. Die Geschwindigkeit bleibt aber über die ganze Simulationszeit konstant . Das heißt im Umkehrschluss, dass die connector-Definition oder die Reibungsdefintion Mist ist.
Hat da jemand eine Idee dazu? Das CAE-File ist übrigens aus V6.9-1 (die alte Version wollte bei mir nicht mehr mitspielen). Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
HerrHansen
Mitglied
Dipl.-Ing.
Beiträge: 257
Registriert: 03.12.2005 Abaqus/CAE 6.3 bis 6.12
|
erstellt am: 26. Apr. 2010 10:36 <-- editieren / zitieren --> Unities abgeben: Nur für Bonifaz
Update: Die Reibungsdefintion war Mist. Du musst im Tab "Predefined Friction Parameters" noch die vier Parameter eingeben. Siehe dazu das Manual 27.2.5 "Specifying friction in a HINGE connection". Ich habe in mein Modell noch die fehlenden Parameter hinzugefügt (beispielhaft die Zahlenwerte wie sie im Manual angegeben sind) und mal CVR1 ausgewertet. Und Tataaa: Die Rotationsgeschwindigkeit nimmt tatsächlich in meinem Modell ab  . .
Du musst also in deinem Modell noch Rp, Ra, Ls und ICM1 definieren, dann sollte es funktionieren. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Bonifaz
Mitglied
Beiträge: 18
Registriert: 21.04.2010
|
erstellt am: 26. Apr. 2010 16:48 <-- editieren / zitieren --> Unities abgeben:
Hallo HerrHansen, vielen vielen Dank für deine Mühe. Im Prinzip konntest du mir auch schon weiter helfen. Leider funktioniert mein Modell mit den analytical rigids nicht. Irgendwie sperrt er die Bewegung dann. Der Constraint, den ich eingefügt habe, ist im Prinzip doch nur die Verbindung mit dem Krafteinleitungs RP und der Oberfläche des Teils, weshalb ich nicht verstehe, warum das die Bewegung sperren sollte?!?
Ich möchte deshalb implizit rechnen, weil für mich die Rückfederung bei einem Umformprozess eine entscheidende Rolle spielt. Mit discrete rigids habe ich mein test-modell auch schon ans Laufen bekommen, ich verstehe nur nicht, warum es bei den analytical nicht geht?!? VG,
Bonifaz Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
HerrHansen
Mitglied
Dipl.-Ing.
Beiträge: 257
Registriert: 03.12.2005 Abaqus/CAE 6.3 bis 6.12
|
erstellt am: 27. Apr. 2010 08:39 <-- editieren / zitieren --> Unities abgeben: Nur für Bonifaz
Zitat:
Original erstellt von Bonifaz:
ich verstehe nur nicht, warum es bei den analytical nicht geht?!?
Also: Wenn dein Bauteil schon ein analytical rigid ist, brauchst du nicht nochmal einen Starrkörper-Constraint draufbasteln. Ich kann mir gut vorstellen, dass durch den "doppelt-gemoppelten" Starrkörper irgendwelche komischen numerischen Effekte auftreten und dass deshalb dein Modell nicht funktioniert. Wenn du einen analytical rigid erstellt hast, musst du doch einen Referenzpunkt definieren (noch im part-Modul). Alles, was dann mit dem Körper passieren soll, muss auf diesen Referenzpunkt bezogen werden!
Wenn du eine Randbedingung definierst, klickst du nicht irgendwelche Flächen des Körpers an, sondern nur den RP.
Wenn du Lasten auf den Körper bringen willst, klickst du nicht irgendwelche Bereiche des Körpers an, sondern nur den RP. Ich hatte nämlich gesehen, dass du die Tangentialkraft auf irgendeinen Punkt definiert hast, der _nicht_ der Referenzpunkt des Starrkörpers war.
Siehe dazu im Manual:
Code:
A rigid body is a collection of nodes, elements, and/or surfaces whose motion is governed by the motion of a single node, called the rigid body reference node.
Schmeiß also mal den Constraint raus und definiere die Kraft/Randbedingungen auf den Referenzpunkt. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Bonifaz
Mitglied
Beiträge: 18
Registriert: 21.04.2010
|
erstellt am: 27. Apr. 2010 10:03 <-- editieren / zitieren --> Unities abgeben:
Ja, das ist mir schon klar, dass bei den analytical Rigids alles auf den RP bezogen werden muss. Der RP des analytical Rigid ist bei mir ja auch vorhanden und zwar ein Teil der Rotationsachse, die ich definiert habe. Der andere RP, den du gesehen hast und auf dem eine Kraft aufgebracht war, war ein RP im Assembly, den ich lediglich mit dem Rigid Body Constraint mit der Fläche des Analytical Rigids verbunden habe. Offenbar ist es aber so, dass dadurch dann der originale RP des analytical ausser Kraft gesetzt wird oder wie auch immer... Wenn ich eine Rotation auf den RP des Parts gebe, dann dreht sich zwar das Koordinatensystem, wie es soll, aber das Teil ansich nicht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
HerrHansen
Mitglied
Dipl.-Ing.
Beiträge: 257
Registriert: 03.12.2005 Abaqus/CAE 6.3 bis 6.12
|
erstellt am: 27. Apr. 2010 19:34 <-- editieren / zitieren --> Unities abgeben: Nur für Bonifaz
Zitat:
Original erstellt von Bonifaz:
Der andere RP, den du gesehen hast und auf dem eine Kraft aufgebracht war, war ein RP im Assembly, den ich lediglich mit dem Rigid Body Constraint mit der Fläche des Analytical Rigids verbunden habe.
So langsam dämmerts mir, wie du dir das gedacht hast. So kann das aber nix werden.
Mach mal folgendes: Modelliere dein Teil als deformierbaren Körper (also ganz normales Vorgehen). Weise irgendwelche Materialdaten zu. Vernetze irgendwie.
Jetzt belegst du den ganzen Körper mit einem rigid body constraint (im CAE hierbei "body" wählen und auf "regions" umschalten). CAE fragt dich dann nach einem Referenzpunkt. Hier wählst du den Mittelpunkt (haste ja schon schon modelliert). Die Option "adjust to mass center" kannst du dir schenken.
Jetzt hast du praktisch einen deformierbaren Körper zu einem Starrkörper umgewandelt und kannst trotzdem deine exzentrische Tangentialkraft auf irgendeinen Punkt des Körpers aufbringen. Das ganze ohne Gewähr, deshalb: Feedback erwünscht Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
HerrHansen
Mitglied
Dipl.-Ing.
Beiträge: 257
Registriert: 03.12.2005 Abaqus/CAE 6.3 bis 6.12
|
erstellt am: 27. Apr. 2010 19:42 <-- editieren / zitieren --> Unities abgeben: Nur für Bonifaz
Oder eine zweite Möglichkeit, die deinem ursprünglichen Modell/Gedankengang eher nahekommt: Schmeiß deinen Rigid Body Constraint raus und kopple den Last-Referenzpunkt (der, wo die Kraft drauf definiert ist) über kinematic coupling an den RP des Starrkörpers. Im nachhinein betrachtet sollte das die bessere Lösung sein. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Bonifaz
Mitglied
Beiträge: 18
Registriert: 21.04.2010
|
erstellt am: 27. Apr. 2010 20:26 <-- editieren / zitieren --> Unities abgeben:
Ahja, mir dämmerts auch so langsam. Ich scheine den Grundgedanken der Rigid-Body-Constraints falsch verstanden zu haben ;-) So ganz bin ich aber noch nicht dahinter gestiegen, ich kann ja schließlich meine Körper auch als Discrete-Rigid modellieren, was ja dann den selben Effekt hätte oder nicht? Im Moment fällt mir kein Anwendungfall ein, bei dem die Rigid-Body-Constraints sinnvoll wären, aber ich denke auch da weiß die Hilfe im Zweifelsfall mehr :-) Dein letzter Lösungsweg macht Sinn, den werde ich mal ausprobieren. Ansonsten könnte man ja auch hier einen Connector (Beam) zwischen RP des Parts und Last-Referenzpunkt einfügen... Vielen lieben Dank für deine Hilfe Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
HerrHansen
Mitglied
Dipl.-Ing.
Beiträge: 257
Registriert: 03.12.2005 Abaqus/CAE 6.3 bis 6.12
|
erstellt am: 28. Apr. 2010 10:21 <-- editieren / zitieren --> Unities abgeben: Nur für Bonifaz
Zitat:
Original erstellt von Bonifaz:
So ganz bin ich aber noch nicht dahinter gestiegen, ich kann ja schließlich meine Körper auch als Discrete-Rigid modellieren, was ja dann den selben Effekt hätte oder nicht?
Mechanisch gesehen ja. Der Unterschied zwischen discrete und analytical rigid ist der, dass analytical rigids in ihrer möglichen geometrischen Form stark eingeschränkt sind. Wenn ein Bauteil als discrete rigid definiert ist, kann es eine beliebig komplexe Form haben (was bei analytical rigid nicht der Fall ist). Zitat:
Original erstellt von Bonifaz:
Im Moment fällt mir kein Anwendungfall ein, bei dem die Rigid-Body-Constraints sinnvoll wären, aber ich denke auch da weiß die Hilfe im Zweifelsfall mehr :-)
Zum Beispiel wenn man deformierbare Bauteile ruck zuck auf Starrkörper umschalten will (sinnvoll z.B. wenn man bei komplizierten Mechanismen die Einflüsse von Bauteilelastizitäten auf die Ergebnisse herausfinden will) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
| Anzeige.:
Anzeige: (Infos zum Werbeplatz >>)
 |

 Foren auf CAD.de
Foren auf CAD.de



 |
|