| | |
 | Tipps für effizienteres Arbeiten mit 3D-CAD-Visualisierungssoftware, eine Pressemitteilung
|
|
Autor
|
Thema: Gelenk, Coupling (2110 mal gelesen)
|
mario83
Mitglied
Konstrukteur

   Beiträge: 23
Registriert: 23.05.2007
|

 erstellt am: 02. Dez. 2007 22:38
erstellt am: 02. Dez. 2007 22:38  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Um eine bestimmte Kinematik 2D darstellen zu können benötige ich 2 Bauteile die miteinander durch ein Gelenk verbunden sind. Sämtliche Versuche (Equation, Coupling,..) sind fehlgeschlagen. Ein hinge-Connector funktioniert in 2D leider nicht. Vielleicht kann mir hier jemand weiterhelfen damit eine Studienarbeit beendet werden kann. Danke! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mustaine
Ehrenmitglied V.I.P. h.c.
Beiträge: 3585
Registriert: 04.08.2005 Abaqus
|
erstellt am: 03. Dez. 2007 11:55 <-- editieren / zitieren --> Unities abgeben: Nur für mario83 
Leider ist aus dem Beispiel nicht zu erkennen was du vorhast. Wenn du einen Hinge benutzen willst, möchtest also wahrscheinlich nur die Translationen von 2 Punkten koppeln. Das geht am leichtesten mit einer Equation und klappt eigentlich auch wenn man es korrekt macht. Eventuell hast du etwas falsch definiert. Wenn du in CAE eine Equaton definierst und die Bewegungen in 2-Richtung koppeln willst, legst du beide Punkte jeweils in ein Set und startest die Definition. In der ersten Zeile gibst du ein:
1; setname1; 2 Zweite Zeile:
-1; setname2; 2 Fertig. Dasselbe machst du nochmal für die zweite Translation. Hier gibst du bei DOF einfach nur die andere Richtung an. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
mario83
Mitglied
Konstrukteur
Beiträge: 23
Registriert: 23.05.2007
|
erstellt am: 03. Dez. 2007 14:38 <-- editieren / zitieren --> Unities abgeben:
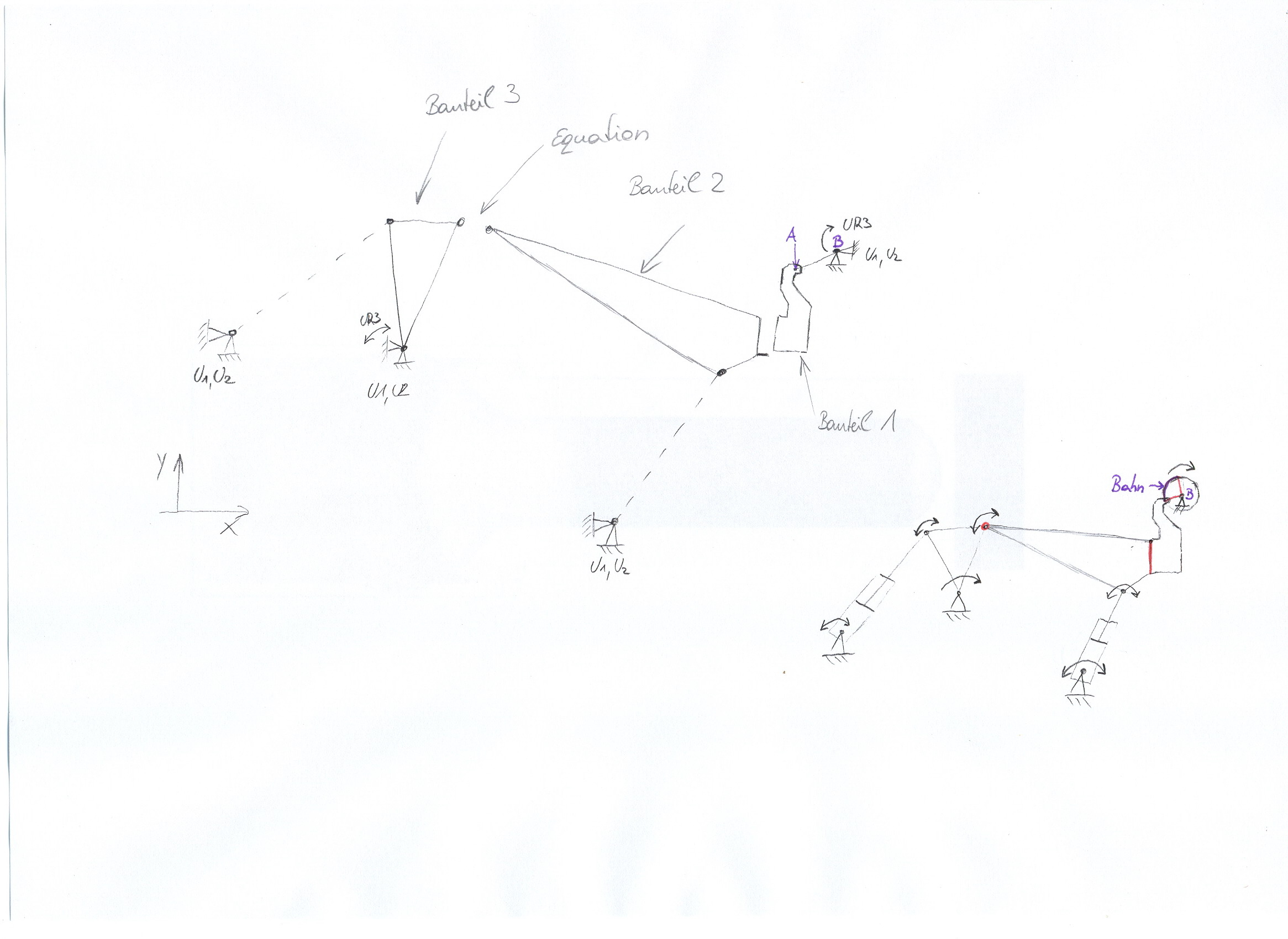
Detailiertes Problem: Bauteil 3 und 2 sind Rigids, Bauteil 1 solid. Bauteil 1 ist mit Bauteil 2 fix verbunden. Bauteil 2 ist über ein Gelenk mit Bauteil 3 verbunden. Bauteil 3 kann sich um den unten fixierten Pkt. drehen. Pkt. A auf Bauteil 1 dreht sich auf der gekennzeichneten Kreisbahn um Pkt. B. Die Zylinder habe ich über eine Translator-Connection modelliert. 1 und 2 sind über ein Coupling miteinander verbunden. Die Zylinder üben keine Funktion aus (force), es wird nur der Hub aufgezeichnet. Das System wird gesteuert indem Pkt. B (UR3) verdreht wird. Ein Equation Constrain wurde versucht: 1 Set1 1 -1 Set2 1 1 Set1 2
-1 Set2 2 Evtl. liegt das Problem in den Rigids, teilweise konnten Sets nicht angesprochen werden?! Danke! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mustaine
Ehrenmitglied V.I.P. h.c.
Beiträge: 3585
Registriert: 04.08.2005 Abaqus
|
erstellt am: 03. Dez. 2007 16:49 <-- editieren / zitieren --> Unities abgeben: Nur für mario83
Ich habe mal kurz nachgeschaut was 2D geht. Eigentlich sollte alles da sein was du brauchst. Den Connector vom Typ "Translator" gibt es 2D; mehr brauchst du ja eigentlich nicht. Das Problem muss also irgendwo bei deinen Definitionen liegen. Mir fehlt aber momentan die Zeit um den Fehler zu suchen. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
mario83
Mitglied
Konstrukteur
Beiträge: 23
Registriert: 23.05.2007
|
erstellt am: 09. Dez. 2007 16:25 <-- editieren / zitieren --> Unities abgeben:
Hallo! Die beiden Bauteile habe ich nun mit beams realisiert und auch das Equation funktioniert. Ein Problem habe ich allerdings noch mit der Bewegung auf der Kreisbahn.
Das gemeshte Teil wird zuerst über eine BC auf den Startpunkt geführt und sollte dann mit konstantem Radius um den obersten Pkt. geführt werden.
Realisierung: Der fixierte Radiusmittelpkt. wird um einen bestimmten Betrag vertdreht. Ein RP ist über ein Coupling mit diesem Pkt. verbunden. Wenn der Pkt. verdreht wird bewegt sich der RP zwar mit, aber der Radius bleibt nicht konstant und auch der Winkel wird nicht erreicht (wahrscheinlich ist Winkel kleiner dafür Radius größer, -> rad von BC stimmen). siehe Pics bzw. ipn oder cae
Der gemeshte Bauteil soll dann auf den RP gekoppelt werden wenn die bewegung funktioniert.
Vielleicht kann mir hier jemand weiterhelfen.
Danke!
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mustaine
Ehrenmitglied V.I.P. h.c.
Beiträge: 3585
Registriert: 04.08.2005 Abaqus
|
erstellt am: 12. Dez. 2007 11:40 <-- editieren / zitieren --> Unities abgeben: Nur für mario83
Zitat:
Original erstellt von mario83:
Hallo!Die beiden Bauteile habe ich nun mit beams realisiert und auch das Equation funktioniert. Ein Problem habe ich allerdings noch mit der Bewegung auf der Kreisbahn.
Das gemeshte Teil wird zuerst über eine BC auf den Startpunkt geführt und sollte dann mit konstantem Radius um den obersten Pkt. geführt werden.
Das wird so nicht funktionieren.
Soetwas wurde nur mit einem Connector (Translator) funktionieren. Bei diesem könntest du den zweiten Punkt auf die gewünschte Position schieben, dann den Connector sperren und dann den ersten (zentralen) Punkt drehen. Außerdem glaube ich, dass dir nicht bewusst ist was die lokalen Koordinatensysteme machen. Diese modifizieren nur die lokalen Knotenkoordinaten der angekoppelten Knoten, indem das definierte lokale Koordinatensystem auf die Knotenposition projiziert wird. Es werden also nur die Richtungen und ggf. Bedeutungen der DOF verändert. Die lokalen Koordinatensysteme sind also keine feste Größe im Raum die du ansprechen oder ansteuern kannst. Zitat:
Realisierung: Der fixierte Radiusmittelpkt. wird um einen bestimmten Betrag vertdreht. Ein RP ist über ein Coupling mit diesem Pkt. verbunden. Wenn der Pkt. verdreht wird bewegt sich der RP zwar mit, aber der Radius bleibt nicht konstant und auch der Winkel wird nicht erreicht (wahrscheinlich ist Winkel kleiner dafür Radius größer, -> rad von BC stimmen). siehe Pics bzw. ipn oder cae
Der gemeshte Bauteil soll dann auf den RP gekoppelt werden wenn die bewegung funktioniert.
Vielleicht kann mir hier jemand weiterhelfen.
Danke!
Also erstmal solltest du NLGEOM einschalten, damit größere Bewegungen korrekt berechnet werden. Ausserdem ist dein System instabil, weswegen die Rechnung auch nicht konvergiert wenn man NLGEOM einschaltet. Mit den derzeitigen Lagerungen könnte deine Baugruppe einfach nach unten oder oben durchschwingen, da du nur an den zwei Knoten die Translationen sperrst. Das System kann sich also um diese beiden Knoten frei drehen. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|