| | |
 | Neues Justiermodul 2.0: Die VARO-JMR-Serie ist da, eine Pressemitteilung
|
|
Autor
|
Thema: Teleskopantrieb (6338 mal gelesen)
|
ledock
Mitglied
Dipl. Ing. Maschinenbau

   Beiträge: 515
Registriert: 12.11.2004 Win 10 64bit
Core I7 9700K
16HBRAM
Intel UHD Graphics 630
Direct Modelling Express
|

 erstellt am: 23. Apr. 2007 16:56
erstellt am: 23. Apr. 2007 16:56  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo Ihr, ich soll gerade eine Linearachse für ein Entnahmehandling in Teleskopausführung realisieren. Dabei soll ich auch die Vorteile darlegen. Hier die Vorteile, die ich gefunden hab - doppelte Endgeschwindigkeit - halbe Belastung der Lager, da die Enddynamik ja in zwei Stufen aufgenommen wird. -Bauraum einsparen
Mein Chef meint jetzt aber, dass es noch zusätzliche Beschleunigungsvorteile geben muss, da ich ja auch die zu bewegende Masse in zwei Schlitten aufteile und ich ja dann pro Schlitten auch weniger Masse beschleunigen muss. (F=m*a)
Ich hingegen sehe das nicht so. Da die Gesamtmasse sich zwar auf zwei Schlitten aufteilt, aber im der Summe wieder gleich bleibt, müsste doch auch die maximal erreichbare Beschleunigung gleich bleiben. Die zwei Schlitten sind ja über einen Riemen miteinander gekoppelt. Oder bin ich damit auf dem Holzweg?
Ich hoffe ich hab meine Problematik einigermaßen verständlich dargelegt. Danke schonmal
Matthias Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
tanzbaer1963
Mitglied
Maschinenbautechniker, Konstrukteur
Beiträge: 824
Registriert: 15.02.2007
|
erstellt am: 23. Apr. 2007 18:24 <-- editieren / zitieren --> Unities abgeben: Nur für ledock 
Hallo Matthias, um bei der Physik zu bleiben: a=v/t
Zitat:
- doppelte Endgeschwindigkeit
Wenn ich also in der gleichen Zeit die doppelte Geschwindigkeit erreiche, habe ich dann nicht automatisch eine größere Beschleunigung? Natürlich muss ich für die größere Beschleunigung auch eine größere Kraft aufwenden (F=m*a).
Wenn nun, wie Du beschrieben hast, die beiden Schlitten miteinander gekoppelt sind (ich verstehe dass so, dass Du nur einen Antrieb dann hast), muss dieser Antrieb dann diese erforderliche Kraft aufwenden, egal ob Du 2, 3, 4 oder mehr Schlitten hast.
Auf der anderen Seite bedeutet ein zusätzlicher Schlitten auch zusätzliche Masse, die ebenfalls beschleunigt werden muss. Ich hoffe, ich habe Deine Problematik einigermassen verstanden. Gruss Ingo
------------------
Theorie ist,wenn man alles weiß und nichts funktioniert.
Praxis ist,wenn alles funktioniert und keiner weiß warum.
Bei mir wird Theorie und Praxis vereint: Nichts funktioniert und keiner weiß warum!  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004 Win 10 64bit
Core I7 9700K
16HBRAM
Intel UHD Graphics 630
Direct Modelling Express
|
erstellt am: 24. Apr. 2007 09:43 <-- editieren / zitieren --> Unities abgeben:
Hallo Tanzbär, ich glaube schon dass du meine Problematik verstanden hast.
Ich will genau wie du geschrieben hast nur einen Motor verwenden. Das heißt bei F=m*a bleibt mein F konstant, egal wie viele Schlitten ich benutze. Der Schlitten bringt zwar auch eine zusätzliche Masse , diese ist aber vernachlässigbar, da er ja nur eine "Übersetzungsfunktion" hat und somit sehr leicht (z.B. Karbon) gebaut werden kann.
Ich werd mal versuchen ne Prinzipskizze zu zeichnen, um das ganze sichtbar zu machen. Jetzt nochmal zu meiner Frage:
Bleibt bei konstanter Kraft auch die Beschleunigung konstant? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
tanzbaer1963
Mitglied
Maschinenbautechniker, Konstrukteur
Beiträge: 824
Registriert: 15.02.2007
|
erstellt am: 24. Apr. 2007 10:11 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Hallo Matthias, Die Frage ist schon durch die Formel F=m*a erklärt. Wenn F konstant ist und m konstant ist kann sich a nicht verändern. heisst im Umkehrschluss aber auch, dass sich die Endgeschwindigkeit nicht ändert, weil a=v/t bzw. v=a*t. Was ich mit meiner Antwort sagen wollte ist:
Eine Verbesserung von Beschleunigung bzw. Endgeschwindigkeit ist demnach nicht eine Frage der Anzahl der Schlitten sondern eine Frage des Antriebes. EDIT: sofern die bewegte Masse gleich bleibt! Gruss Ingo ------------------
Theorie ist,wenn man alles weiß und nichts funktioniert.
Praxis ist,wenn alles funktioniert und keiner weiß warum.
Bei mir wird Theorie und Praxis vereint: Nichts funktioniert und keiner weiß warum! [Diese Nachricht wurde von tanzbaer1963 am 24. Apr. 2007 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004 Win 10 64bit
Core I7 9700K
16HBRAM
Intel UHD Graphics 630
Direct Modelling Express
|
erstellt am: 24. Apr. 2007 10:58 <-- editieren / zitieren --> Unities abgeben:
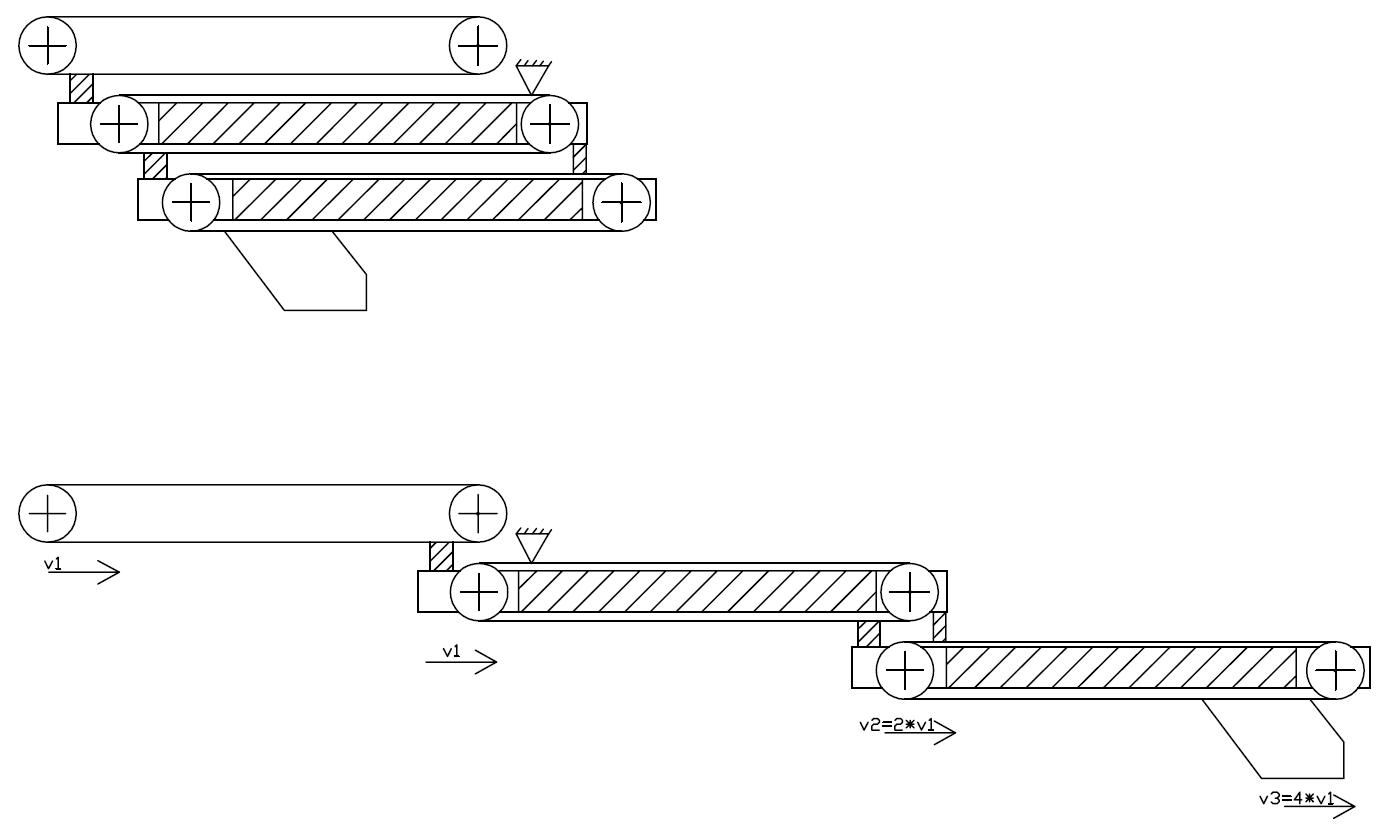
So, ich hab hier mal ne Skizze als Teleskop mit 3 Ebenen. Ich gehe jetzt davon aus, dass die gesamte Masse gleich ist, wie bei einem normalen Riemenantrieb ohne Teleskop und meine Motorkraft ebenfalls gleich ist. Dann ändert sich doch in der Beschleunigung nichts, oder? Grüße Matthias Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
tanzbaer1963
Mitglied
Maschinenbautechniker, Konstrukteur
Beiträge: 824
Registriert: 15.02.2007
|
erstellt am: 24. Apr. 2007 11:08 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
unter den gegebenen Bedingungen in der Beschleunigung nicht. Aber auch nicht in der Endgeschwindigkeit, weil die ja ebenfalls von der Beschleunigung abhängig ist. Bliebe von den in Deinem ersten Posting genannten Vorteilen IMHO nur noch der geringere Bauraum. nur noch der geringere Bauraum. Gruss Ingo ------------------
Theorie ist,wenn man alles weiß und nichts funktioniert.
Praxis ist,wenn alles funktioniert und keiner weiß warum.
Bei mir wird Theorie und Praxis vereint: Nichts funktioniert und keiner weiß warum! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Jonischkeit
Ehrenmitglied V.I.P. h.c.
Freiberuflicher Ingenieurdienstleister (CSWP)

Beiträge: 2684
Registriert: 29.07.2003 CSWP
Solidworks
verschiedene Rechner
|
 erstellt am: 24. Apr. 2007 12:22 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
erstellt am: 24. Apr. 2007 12:22 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Zitat:
Original erstellt von tanzbaer1963:
Bliebe von den in Deinem ersten Posting genannten Vorteilen IMHO nur noch der geringere Bauraum.
.... und evtl. der Nachteil, daß das ganze filigraner ist, leichter klemmt, teurer herzustellen... wobei der kleinere Bauraum ein unschlagbarer Vorteil sein kann.
Für ein höheres Tempo würde ich eher versuchen, einen möglichst einfachen Aufbau im Gewicht zu optimieren. HTH
Michael
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004
|
erstellt am: 24. Apr. 2007 14:49 <-- editieren / zitieren --> Unities abgeben:
Hallo Ihr, eure Antworten bestätigen meine Gedankenweise.
Trotzdem sieht man im der Spritzgussautomation immer wieder Achsen mit Teleskopierung. Auf http://www.petersuhlingautomation.de/ wird dies z.B. folgenderweise begründet:
"Wie unsere standard Entnahmegeräte werden auch die Seitenentnahmen teleskopiert. Hierbei wird nur die geringe Masse unseres Entnahmegreifers auf die eigentliche Endgeschwindigkeit bis ca. 8 m/s beschleunigt. Ca. 85% der bewegten Masse benötigt also nur die halbe Beschleunigung und die halbe Geschwindigkeit." Meiner (, und ich denke in diesem Fall auch eurer) Meinung nach ist diese Aussage falsch. Mein Chef glaubt meiner Argumentation aber nicht so wirklich. Mir fehlen momentan irgendwie einfach die Argumente um dagegen anzukommen. Nur mit der Formel F=m*a wird es vermutlich schwer werden ihn zu überzeugen. Er vermutet da was komplizierteres dahinter Ich will auch nochmal sagen, dass ich mir selbst noch nicht ganz sicher bin ob meine Argumetation richtig ist  Matthias @Tanzbär:
Zitat:
heisst im Umkehrschluss aber auch, dass sich die Endgeschwindigkeit nicht ändert, weil a=v/t bzw. v=a*t.
die Endgeschwindigkeit wird schon doppelt so groß, nur benötigt man eben auch die doppelte Zeit bis die Geschwindigkeit erreicht wird. Vorrausgesetzt natürlich das der Weg lang genug ist. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004 Win 10 64bit
Core I7 9700K
16HBRAM
Intel UHD Graphics 630
Direct Modelling Express
|
erstellt am: 24. Apr. 2007 15:12 <-- editieren / zitieren --> Unities abgeben:
Ich hab jetzt mal versucht das ganze formelmäßig zu begründen. Als Grundformel hab ich die der Leistung genommen. Die Motorleistung beträgt P=M*n. Die Leistung, die der Antrieb aufnimmt ist P=F*v. Logischerweise kann ich doch aus diesen Formeln schließen, dass bei konstanter Endgeschwindigkeit ich immer nur eine betimmte Kraft zur Verfügung hab. Somit kann ich eine theoretisch maximale Beschleunigung bei einer bestimmten Geschwindigkeit, oder umgekehrt festlegen. Dieser Wert kann ich doch auch nicht mit irgendwelchen "vermeintlich" geschickten Antriebsanordnungen erhöhen, oder Grüße Matthias Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 24. Apr. 2007 15:34 <-- editieren / zitieren -->
Hallo, wenn Du die Leistung bei Deiner Berechnung zugrundelegst, gehe ich davon aus, dass es Dir auf ein möglichst effektives System ankommt. Anhand der zu bewegenden Masse und der gewünschten Beschleunigung läßt sich die erforderliche Leistung errechnen. Alles was dazwische passiert ist ersteinmal vernachlässigbar.
Im Detail wird's bei den zusätzlichen Massen und event. Reibung dann wieder interessant. Daher:
so einfach wie möglich bauen. ------------------
Gruß aus dem Norden |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister

Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 24. Apr. 2007 15:35 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Zitat:
Original erstellt von ledock:
...Mein Chef meint jetzt aber, dass es noch zusätzliche Beschleunigungsvorteile geben muss...
Hallo Matthias, Ich bin auch der Meinung dass man einen Vorteil bei der Beschleunigung erzielen kann, insbesondere wenn man einen leichteren Anteil (= die 2. Teleskopstufe) auf die Endgeschwindigkeit beschleunigt, einen schwereren Anteil (= die 1. Teleskopstufe) aber lediglich auf die halbe Endgeschwindigkeit (und da das in der gleichen Zeit passiert, auch mit entsprechend geringerer Beschleunigung).
Jetzt darf nur nicht so unglücklich konstruiert werden, dass viele zusätzliche Masse den Vorteil wieder auffrisst <G> Schau in die Natur, die für sehr Vieles in der Technik als Vorbild dienen kann: Teleskop-Ausleger kenn ich keine, aber z.B. der Fangarm der Gottesanbeterin, der äusserst rasant bewegt werden kann, hat zwei "Hauptsegmente", Eines bewegt sich mit halber Geschwindikeit den halben Weg, das Andere mit voller Geschwindigkeit den vollen Weg. ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Doc Snyder
Ehrenmitglied V.I.P. h.c.
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen

Beiträge: 13772
Registriert: 02.04.2004 Autodesk Inventor
|
 erstellt am: 24. Apr. 2007 15:36 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
erstellt am: 24. Apr. 2007 15:36 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Das ist ja schlichtweg nicht zu ertragen hier!  Wie man so was richtig und systematisch analysiert und löst, lernt man an entsprechenden Fach- oder Hochschulen, und wenn es daran fehlt, dann beauftragt mit der Lösung dieser Entwicklungs- und Konstruktionsaufgabe bitte jemanden, der es kann! [PS: Ich meinte hier ausdrücklich nicht die beiden Kollegen, deren Beiträge ich erst jetzt sehe. Die wären eher welche, denen man das besser anvertrauen sollte.] ------------------
Roland
www.Das-Entwicklungsbuero.de [Diese Nachricht wurde von Doc Snyder am 24. Apr. 2007 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004
|
erstellt am: 24. Apr. 2007 15:49 <-- editieren / zitieren --> Unities abgeben:
Dann werd ich mir jetzt wohl jemand anderes suchen der sich damit auskennt. Den Anderen (besonders den beiden Kollegen, denen man das besser anvertrauen sollte  ) nochmals vielen Dank für die Ratschläge und Hilfe ) nochmals vielen Dank für die Ratschläge und Hilfe [Diese Nachricht wurde von ledock am 24. Apr. 2007 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Zapfonator
Mitglied
Ingenieur
Beiträge: 115
Registriert: 31.07.2003
|
erstellt am: 24. Apr. 2007 15:58 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Schöner Denksport vor Feierabend.... Betrachten wir mal die Relativsysteme: Ein Schlitten alleine bewegt sich mit der Geschwindigkeit v und erfährt dabei die Beschleunigung a, er legt dabei den Weg s in der Zeit t zurück. Setze ich diesen Schlitten auf einen anderen Schlitten der sich ebenfalls mit v bewegt, addieren sich die Geschwindigkeiten zu 2*v und er legt den doppelten Weg 2*s zurück. Da die Zeit t konstant bleibt, muss er die doppelte Beschleunigung erfahren haben. Setzt man diese beiden Schlitten auf einen dritten, beginnt das Spiel von vorne. 3-fache Geschwindigkeit, 3-facher Weg, 3-fache Beschleunigung da konstante Zeit t.... Die Relativgeschwindigkeiten addieren sich somit. Die Summe der Kräfte jedes Einzelsystems ergeben deine benötigte Gesamtkraft, hierbei auf die bwegten Massen der einzelnen Stufen beachten.
Anschauliches Beispiel:
Eine Fliege die sich mit 5km/h im ICE bewegt, rast außerhalb des Zuges betrachtet auch mit 250 Km/h + 5 km/h durch die Landschaft....
Bin ich auf dem Holzweg ?
------------------
----------------------------------
Mit Humor geht alles besser....... Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004 Win 10 64bit
Core I7 9700K
16HBRAM
Intel UHD Graphics 630
Direct Modelling Express
|
erstellt am: 24. Apr. 2007 16:38 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Da die Zeit t konstant bleibt, muss er die doppelte Beschleunigung erfahren haben.
Das ist genau der springende Punkt. Da die Antriebskraft vom Motor gleich bleibt, bleibt meiner Meinung nach die Beschleunigung konstant und die Zeit verdoppelt sich. Klar, ich könnte einen stärkeren Motor nehmen, nur der würde auch ohne Teleskopierung eine höhere Beschleunigung bewirken.
Das ist ja genau das Problem:
Kann ich bei gleicher Motorisierung, mit einem anderem Antriebskonzept (in diesem Fall Teleskopierung) eine höhere Dynamik erhalten? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 24. Apr. 2007 16:43 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Hast Du durchgelesen was ich oben geschrieben habe? IMHO ist es möglich, durch ein geschicktes Konzept bei gleicher Motorisierung eine höhere Dynamik zu erhalten.
Eben durch die Aufteilung in zwei Teleskop-Segmente, wie Du ja vorhast.
Einschränkung wie auch oben beschrieben: Die Gesamtmasse der Konstruktion wird eher höher werden, der bewegte Anteil darf aber nicht so hoch werden dass der positive Effekt wieder übertönt wird. ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
tanzbaer1963
Mitglied
Maschinenbautechniker, Konstrukteur
Beiträge: 824
Registriert: 15.02.2007
|
erstellt am: 24. Apr. 2007 17:10 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Hallo Leo, etwas verstehe ich bei Deiner Erklärung noch nicht so ganz. Wenn F=m*a (Naturgesetze stelle ich zunächst mal nicht in Frage) F soll konstant sein
m wird eher etwas grösser (wegen der zusätzlichen Bauteile) wie kann dann auch a grösser werden? Vor allem, wenn man bedenkt, dass ich nach dem Hebelgesetz und dem Energieerhaltungssatz, an der Antriebseite genau so viel Energie in das System einbringen muss, wie an der Abtriebseite zur Verfügung stehen soll (Reibungsverluste mal ausser acht gelassen). Gruss Ingo ------------------
Theorie ist,wenn man alles weiß und nichts funktioniert.
Praxis ist,wenn alles funktioniert und keiner weiß warum.
Bei mir wird Theorie und Praxis vereint: Nichts funktioniert und keiner weiß warum! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 25. Apr. 2007 07:27 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Hallo Ingo, Was willst Du erreichen? IMHO einen Greifer und ein Werkstück möglichst schnell im Raum von A nach B bewegen. Wenn Du nun die bewegte Masse aufteilst in zwei (Teleskop-)Teile, einen Teil davon mit geringer Geschwindigkeit nur bis A' bewegst, und einen anderen Teil den ganzen Weg von A nach B, kannst Du daraus einen Vorteil lukrieren.
Aber wie schon mehrfach betont: Der Vorteil muss behutsam rausgearbeitet werden, er wird auch nicht sehr gross sein. ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004
|
erstellt am: 25. Apr. 2007 09:47 <-- editieren / zitieren --> Unities abgeben:
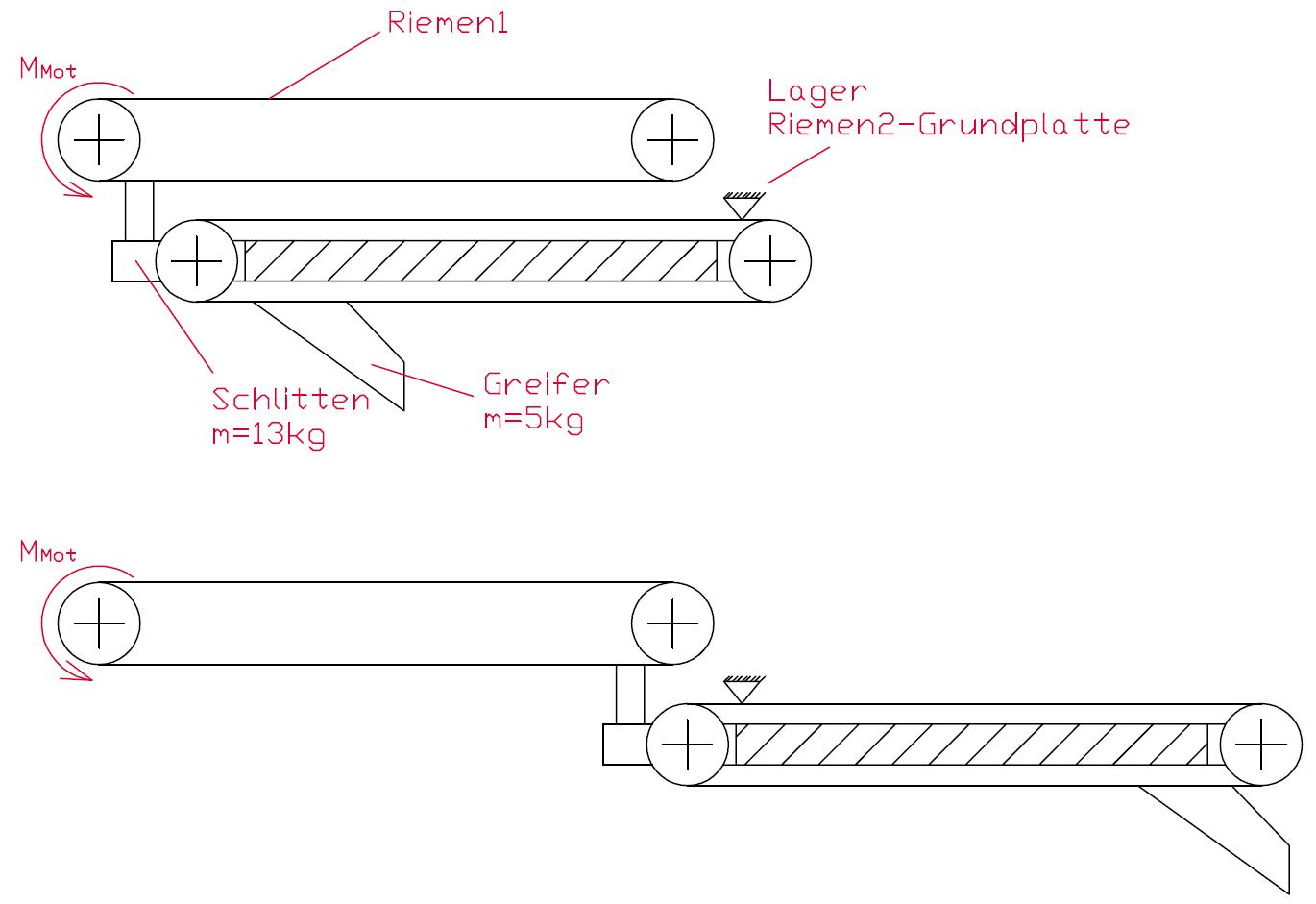
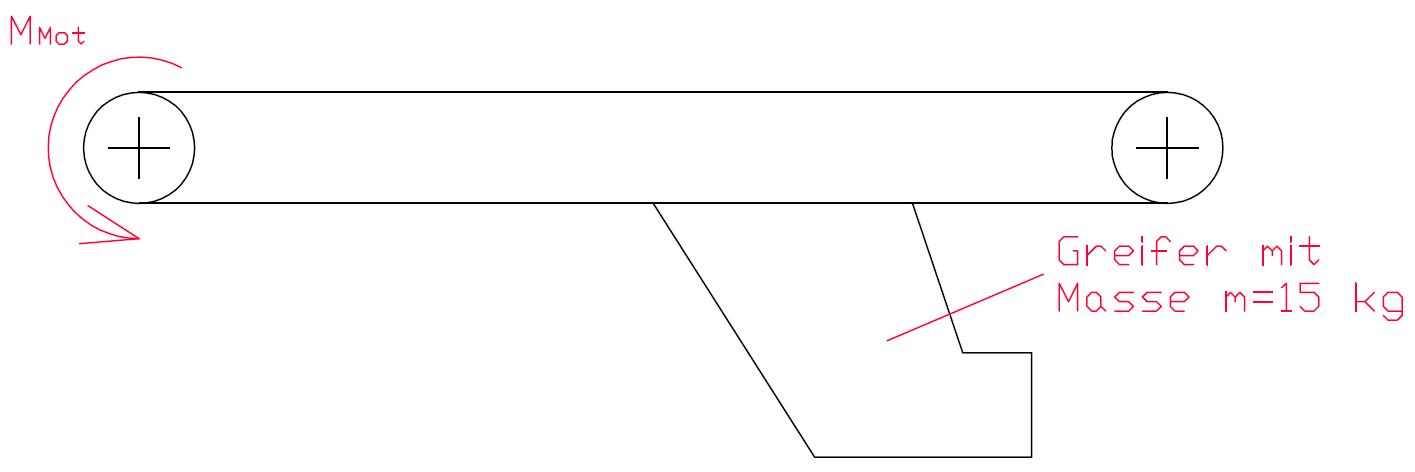
Also ich hab jetzt mal versucht das ganze nachzurechnen. Als erstes mal mit einem Standardantrieb (siehe Anhang: standard) Der Motor leistet 100 Nm Drehmoment bei einer max. Drehzahl von 1000 1/min. Die Riemenscheibe hat einen Durchmesser von 0,1 m. Der Greifer wiegt 15 kg. Das Massenträgheitsmoment des Motors lasse ich aussen vor, da es bei beiden Varianten gleich ist.
Daraus folgt:
a = F/m --> a = (2*M)/(d*m) --> a = (2*100)/(0,1*15) --> a = 133 m/s²
Die max. Höchsgeschwindigkeit ist:
v = n*U = (1000*pi*d)/60 = (1000*pi*0,1)/60 = 5,23 m/s Jetzt mach ich das Gleiche mit meinem Teleskopantrieb (siehe Anlage 2-er Teleskop).
Die Motordaten und der Riemendurchmesser bleiben gleich. Die Masse hab ich jetzt auf 10 kg (13kg Schlitten + 5kg Greifer) erhöht.
Daraus folgt:
Beschleunigung Schlitten: a = (2*100)/(0,1*18) = 111,11 m/s²
Die max. Geschwindigkeit bleibt gleich. Jetzt verlasse ich meinen "sicheren Boden" und komme in den Bereich von Vermutungen.
Meine Lösung ist:
Da der 2. Riemen mit der Grundplatte verbunden ist, erfährt er die gleiche Beschleunigung wie der Schlitten daraus würde sich eine Beschleunigung des Greifers von 2*111,11 = 222,22 m/s² ergeben. Die Endgeschwindigkeit würde ebenfalls 2*5,24 = 10,47 m/s betragen. Irgendwie habe ich meiner Meinung nach bei bei dieser Lösung die Reaktionskräfte des Lagers, welches mit der Grundplatte verbunden ist, vernachlässigt.
Wenn ich sie aber aus der Greifermasse herleiten will, hätte ich die Masse doppelt berücksichtigt.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
tanzbaer1963
Mitglied
Maschinenbautechniker, Konstrukteur
Beiträge: 824
Registriert: 15.02.2007 Office
PRDSU 2015 & 2018 Ultimate
Win 10 64
Home
C2D 2*2,13GHz 4GB-Ram Quaddro FX1500
Win 7 64
PDS 2014
|
erstellt am: 26. Apr. 2007 14:39 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Hallo zusammen, Mann o Mann, wie man doch manchmal daneben liegen kann! Aber ich bin ja lernfähig (manchmal  ). Mein Fehler war, ich habe zunächst nur Greifer und Nutzlast als bewegte Masse gesehen.  Also ledlock, ich habe mir die ganze Geschichte nochmal genauer angesehen, mit den Daten, die Du zum Schluss noch angegeben hast.
Als Nutzlast habe ich einfach mal 2kg angenommen.
Nach den vorliegenden Daten zieht Dein Antrieb mit F=2000N am Zahnriemen. Um daraus jetzt die max.mögliche Beschleunigung zu ermitteln: 1. einfacher Schlitten:
F=m(greifkopf)*a + m(nutzlast)*a
a=2000N/17kg =117,647m/s² 2. Teleskopschlitten
Übersetzung 1:2 Darum Beschleunigung für denSchlitten nur a/2 F=m(schlitten)*a/2 + m(greifkopf)*a + m(nutzlast)*a
F= 13kg*a/2 + 5kg*a + 2kg*a
F= 13,5kg*a a= 2000N/13,5kg
= 148,148 m/s² ACHTUNG: alles NUR theoretische Werte!!! Aber man sieht, es ist eine Verbesserung möglich.
Sie ist allerdings nicht so gross, dass ich gegenüber der ursprünglichen Konstruktion die Beschleunigungswerte und damit auch die Endgeschwindigkeit, verdoppeln könnte. Leo, kannst Du mir noch mal verzeihen? Gruss Ingo ------------------
Theorie ist,wenn man alles weiß und nichts funktioniert.
Praxis ist,wenn alles funktioniert und keiner weiß warum.
Bei mir wird Theorie und Praxis vereint: Nichts funktioniert und keiner weiß warum! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 26. Apr. 2007 14:47 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Zitat:
Original erstellt von tanzbaer1963:
...Leo, kannst Du mir noch mal verzeihen?...
So oft, wie ich selber mal wo danebenliege, ist's klug, stets das Verzeihens-Konto positiv zu halten.
Also: Ja, wird gerne verziehen! <G> ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004
|
 erstellt am: 26. Apr. 2007 16:18 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 26. Apr. 2007 16:18 <-- editieren / zitieren --> Unities abgeben:
Ich danke euch, jetzt hab sogar ich es verstanden  Mein Problem war glaub ich, dass ich die Formel zu früh nach a aufgelöst und drum den Zusammenhang nicht erkannt hab. Sicherlich kommt auch noch mein mangelndes Verständnis für die Dynamik (TM3 >>  ) hinzu. Sobald ich an meinem Rechner zuhause bin wird es Unities hageln (ich kann hier aufgrund der Firewall keine vergeben) Danke nochmals Matthias [Diese Nachricht wurde von ledock am 26. Apr. 2007 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004 Win 10 64bit
Core I7 9700K
16HBRAM
Intel UHD Graphics 630
Direct Modelling Express
|
erstellt am: 08. Mai. 2007 09:48 <-- editieren / zitieren --> Unities abgeben:
Hallo Ihr, da ich nur dank eurer Hilfe auf die komplette Lösung gekommen bin, bin ich sie euch auch schuldig.
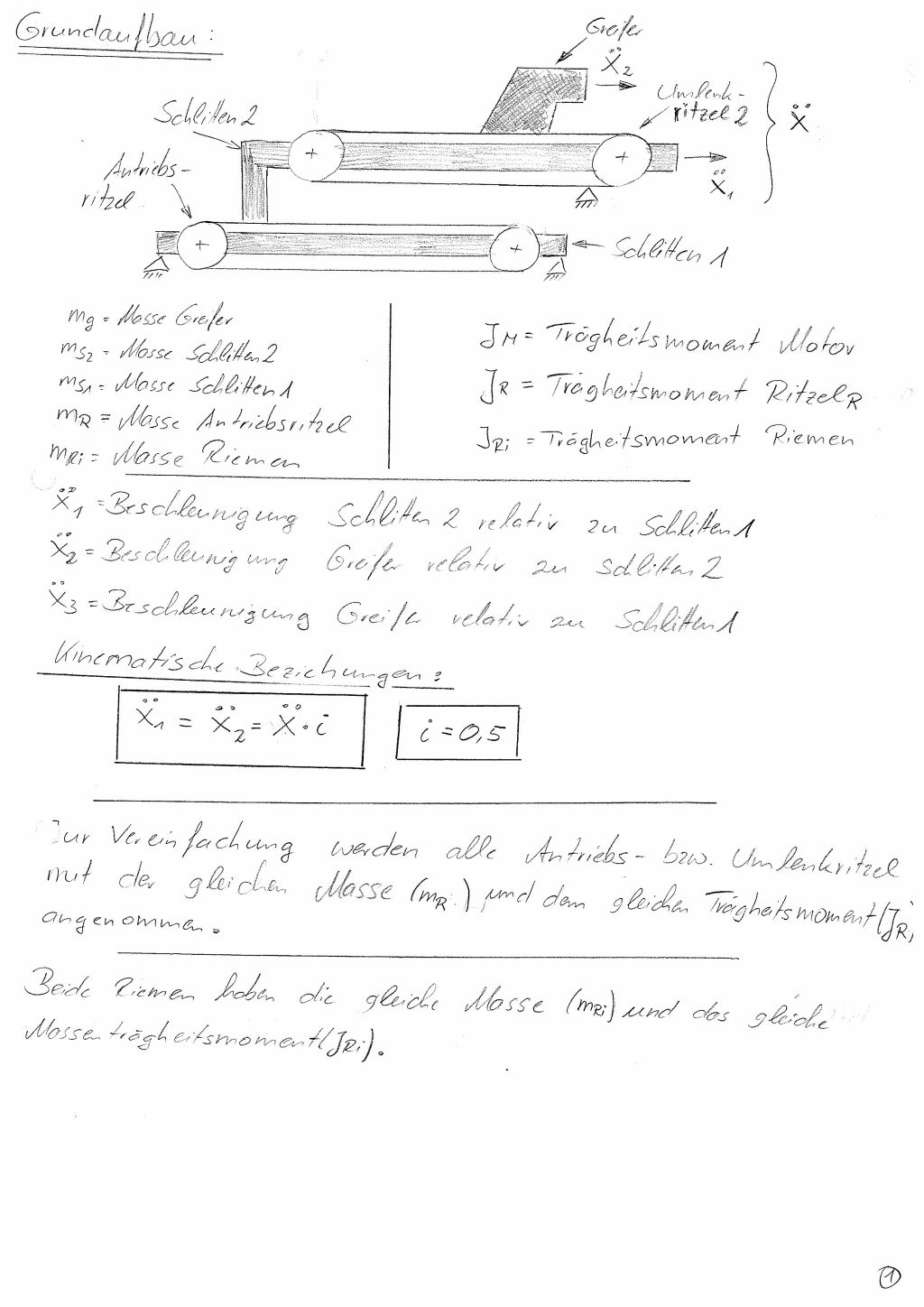
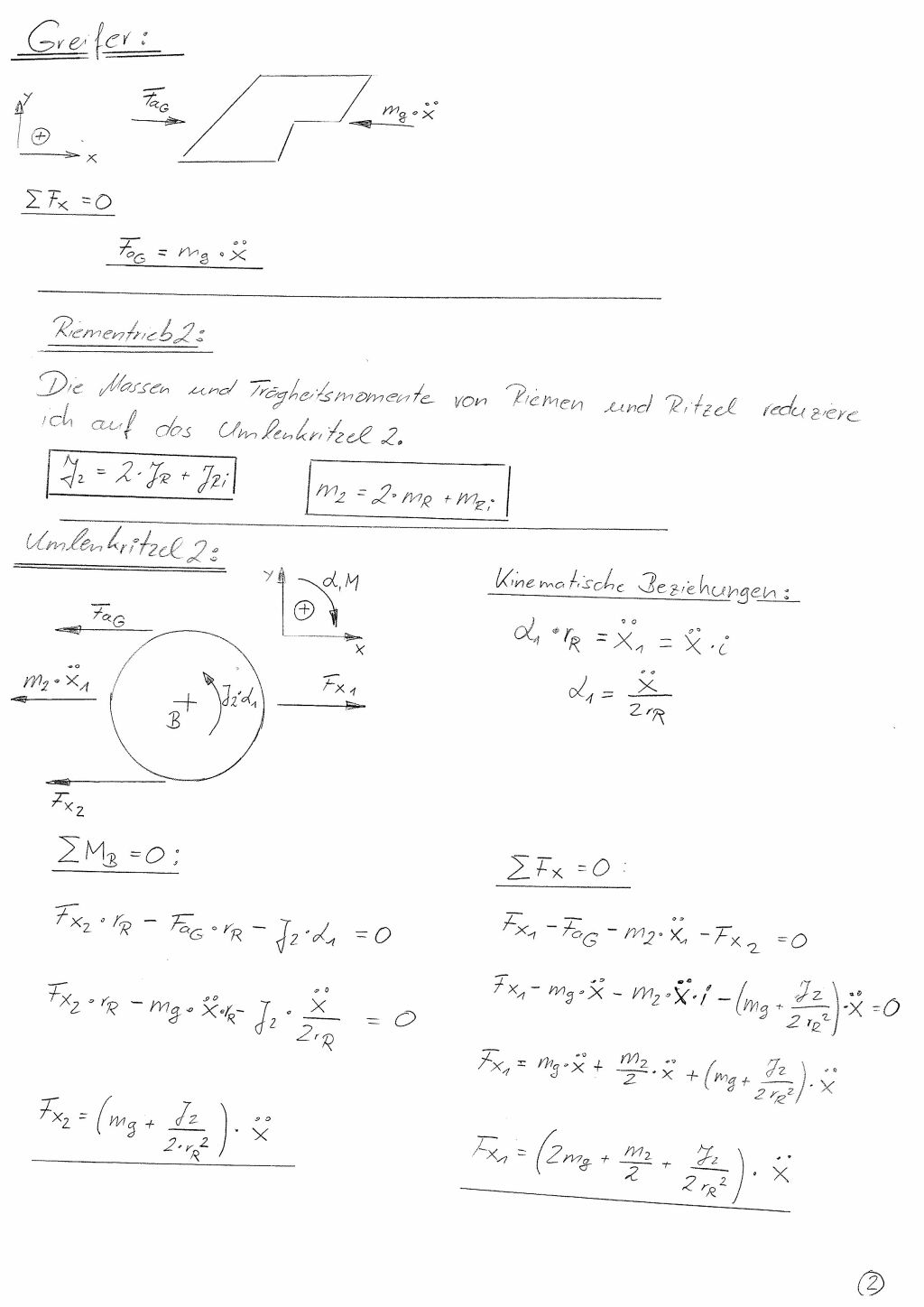
Ich hab jetzt mal die Teleskopierung unter Berücksichtigung sämtlicher Massen und Trägheitsmomente hergeleitet.
Ich denke, dass es so richtig ist. Da wenn man nur die Greifer und Zwischenschlittenmasse betrachtet auf die Löung von Tanzbär kommt. Vielen Dank nochmals und macht so weiter... Matthias ------------------
Treffen sich ne Null und ne Acht. Sagt die Null: "Hey schicker Gürtel" Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004
|
erstellt am: 08. Mai. 2007 09:51 <-- editieren / zitieren --> Unities abgeben:
|
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004 Win 10 64bit
Core I7 9700K
16HBRAM
Intel UHD Graphics 630
Direct Modelling Express
|
erstellt am: 08. Mai. 2007 16:45 <-- editieren / zitieren --> Unities abgeben:
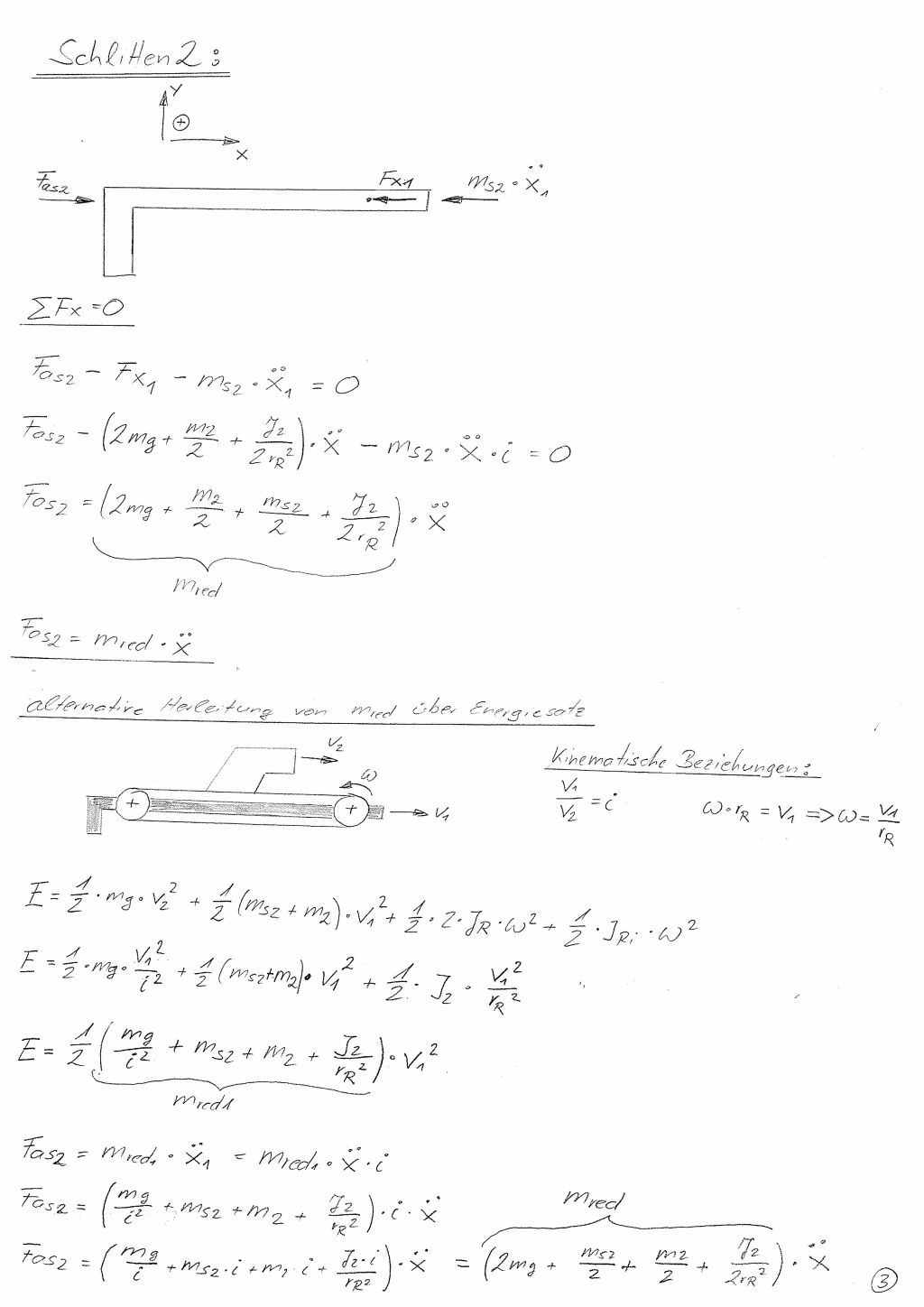
ich hab noch zwei größere Fehler festgestellt: 1. Die Beschleunigung für die Reaktionskraft auf Blatt2 des Greifers muss die Absolutbeschleunigung sein. 2. Ich habe vernachlässigt, dass die Umlenkrollen und Riemen translatorisch und rotatorisch bewegen Hab also noch was zu verbessern. Matthias ------------------
Treffen sich ne Null und ne Acht. Sagt die Null: "Hey schicker Gürtel" Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004
|
erstellt am: 15. Mai. 2007 16:26 <-- editieren / zitieren --> Unities abgeben:
Hallo Ihr, ich hab das Ganze jetzt nochmals gerechnet und komm jetzt aber auf ne andere Lösung wie tanzbär.
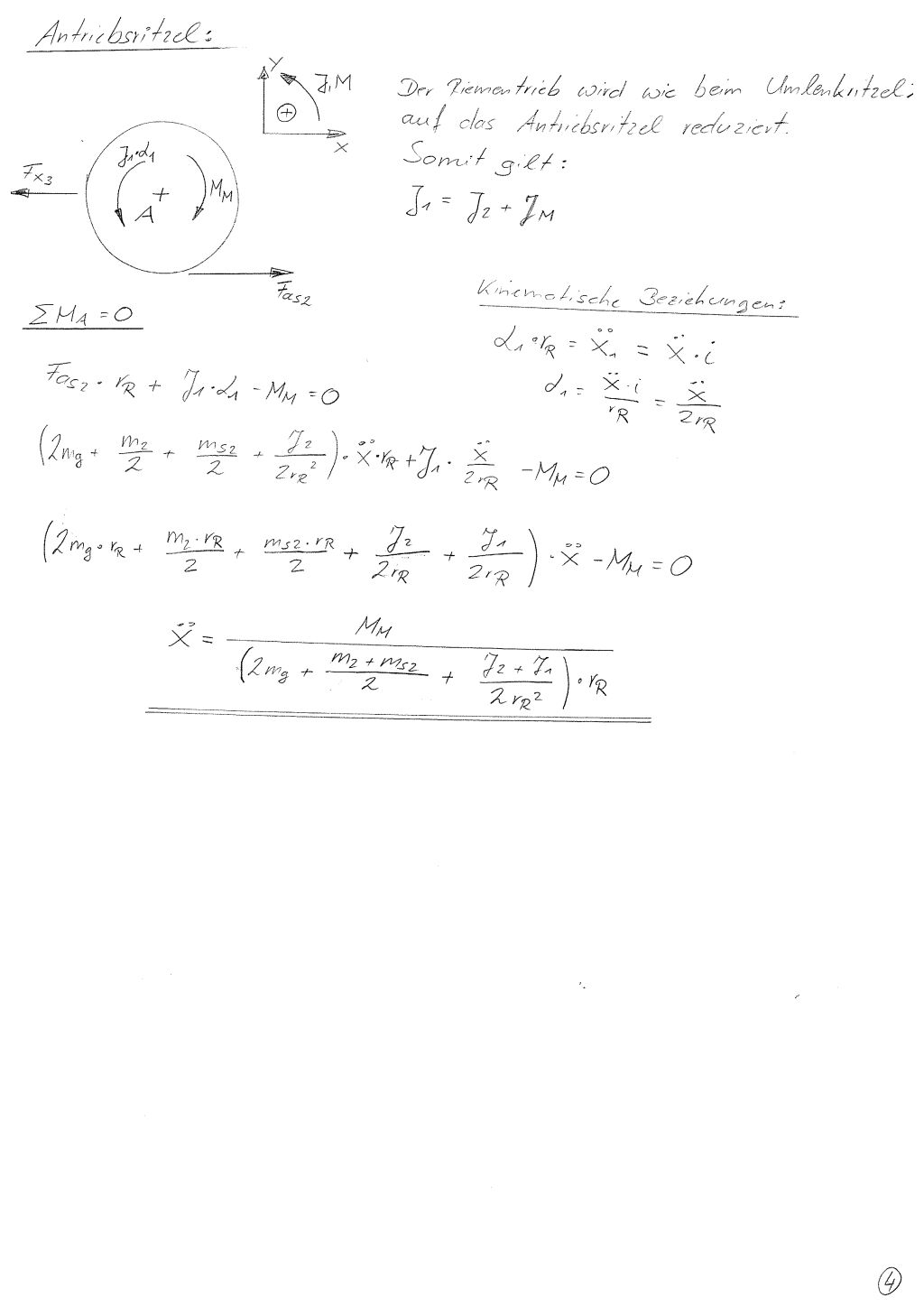
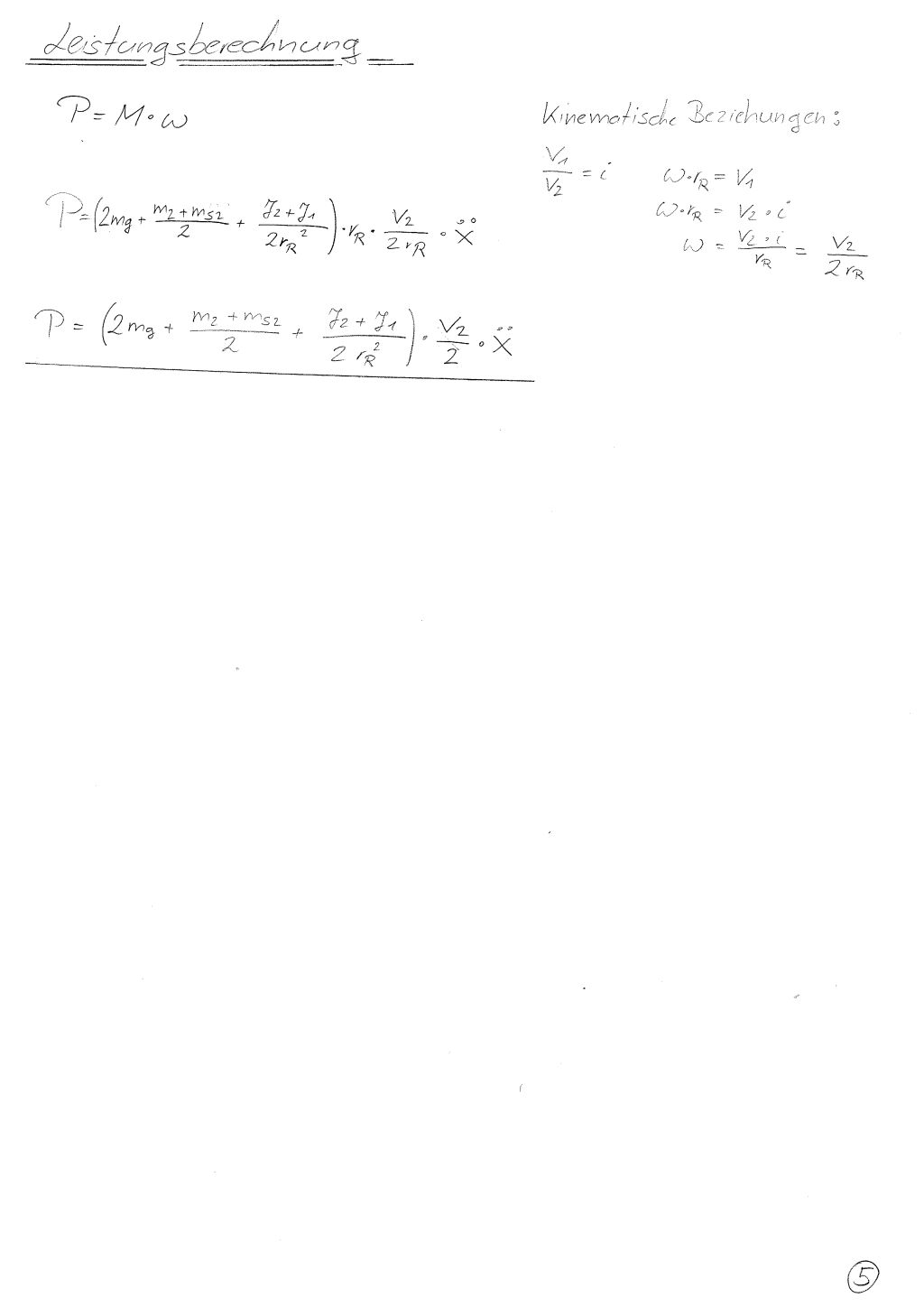
Meine Lösung ist auf Blatt 4 zu finden. Vernachlässige ich dabei die Auswirkungen von Riemen und Umlenkrolle komme ich auf
F=M/r=m(greifkopf)*2a + m(schlitten)*a/2 Bei meinem Rechenweg finde ich keinen Fehler. Hat von euch jemand ne Ahnung ob ich nen Fehler im Ansatz habe? Grüße und Danke
matthias ------------------
Treffen sich ne Null und ne Acht. Sagt die Null: "Hey schicker Gürtel" Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004 Win 10 64bit
Core I7 9700K
16HBRAM
Intel UHD Graphics 630
Direct Modelling Express
|
erstellt am: 15. Mai. 2007 16:29 <-- editieren / zitieren --> Unities abgeben:
|
tanzbaer1963
Mitglied
Maschinenbautechniker, Konstrukteur
Beiträge: 824
Registriert: 15.02.2007
|
erstellt am: 15. Mai. 2007 17:06 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Hallo Mathias, ohne auf Deine detaillierten Berechnungen zu gehen, nur eine kleine Zwischenfrage:
Zitat:
F=M/r=m(greifkopf)*2a + m(schlitten)*a/2
Hiesse: 2a : a/2 wie 4:1
Hiesse, Du hast ein anderes Übersetzungsverhältnis? Gruss Ingo EDIT: PS: Desweiteren vermisse ich in Deinen Überlegungen die Nutzlast (halte ich für nicht ganz ungefährlich).
Müsste es auf Seite 2 nicht heissen F(aG) =mg * x3 ? ------------------
Theorie ist,wenn man alles weiß und nichts funktioniert.
Praxis ist,wenn alles funktioniert und keiner weiß warum.
Bei mir wird Theorie und Praxis vereint: Nichts funktioniert und keiner weiß warum! [Diese Nachricht wurde von tanzbaer1963 am 15. Mai. 2007 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004 Win 10 64bit
Core I7 9700K
16HBRAM
Intel UHD Graphics 630
Direct Modelling Express
|
erstellt am: 15. Mai. 2007 23:17 <-- editieren / zitieren --> Unities abgeben:
Hallo Ingo, hast recht, es müßte laut meiner Beschreibung auf Blatt1 x3 heißen. Ändert aber am Wert nichts. Als Übersetzung komme ich aufgrund der Telskopierung auf 2:1. 4:1 würde IMHO nur mit einer Zwischenübersetzung funktionieren. Die Nutzlast kann ich vernachlässigen, da es zu 99% nur kleine Spritzgussteile mit ein paar Gramm Gewicht sind. Ansonsten kann ich sie doch auch einfach zum Greifergewicht addieren, oder? ------------------
Treffen sich ne Null und ne Acht. Sagt die Null: "Hey schicker Gürtel" Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
tanzbaer1963
Mitglied
Maschinenbautechniker, Konstrukteur
Beiträge: 824
Registriert: 15.02.2007
|
erstellt am: 16. Mai. 2007 06:52 <-- editieren / zitieren --> Unities abgeben: Nur für ledock
Hallo Mathias, Wenn Du wie in Deiner Formel oben den Greifkopf mit 2*a beschleunigst
und den Schlitten mit a/2 hättest Du ein Verhältnis von 2a : a/2 = 4 : 1 Da aber mechanisch bedingt nur ein Verhältnis von 2:1 sein kann, würde ich mal tippen, dass auf dem Weg zu Deiner Formel
Zitat:
F=M/r=m(greifkopf)*2a + m(schlitten)*a/2
irgendwo ein qausus knacksus steckt. Leider konnte ich Deine Aufstellungen zeitlich bedingt noch nicht auseinander dröseln. Gruss Ingo ------------------
Theorie ist,wenn man alles weiß und nichts funktioniert.
Praxis ist,wenn alles funktioniert und keiner weiß warum.
Bei mir wird Theorie und Praxis vereint: Nichts funktioniert und keiner weiß warum! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004 Win 10 64bit
Core I7 9700K
16HBRAM
Intel UHD Graphics 630
Direct Modelling Express
|
erstellt am: 16. Mai. 2007 10:32 <-- editieren / zitieren --> Unities abgeben:
wie schon geschrieben hatte ich bei der ersten Rechnung das gleiche Ergebnis wie du. Hab da allerdings den Fehler gemacht, dass ich für die Beschleunigungskraft für den Greifer nur die Relativbeschleunigung des Greifers zum Zwischenschlitten genommen hab. Für Reaktionskräfte muss ich aber die Absolutbeschleunigung nehmen. Diese ist ja genau doppelt so groß. Deshalb hab ich am Greifer jetzt auch 2a. Vielleicht hab ich aber auch in der Rechnung nen Fehler. Ich werd sie mir auch jeden Fall nochmals anschauen. ------------------
Treffen sich ne Null und ne Acht. Sagt die Null: "Hey schicker Gürtel" Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ledock
Mitglied
Dipl. Ing. Maschinenbau
Beiträge: 515
Registriert: 12.11.2004
|
 erstellt am: 20. Jul. 2007 15:24 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 20. Jul. 2007 15:24 <-- editieren / zitieren --> Unities abgeben:
Hallo Ihr, zuerst einmal möchte ich mich gleich dafür entschuldigen, dass ich so ein altes Thema wieder nach oben schiebe. Für mich hat sich das Problem aber immer noch nicht gelöst. Wie schon oben beschrieben, klingt mir die Lösung von Tanzbär und Leo plausibel. Ich hab diese Lösung ja auch mit meiner ersten Berechnung erhalten.
Dabei hab ich jedoch den Fehler gemacht, dass ich als Reaktionkraft für den Greifer nicht die Absolutbeschleunigung, sondern die Relativebeschleunigung zwischen Greifer und Schlitten 2 genommen habe.
Mit der neuen Berechnung komme ich auf das oben gepostete Ergebnis. Ich habe diese Rechnung mehrmals kontrolliert und auch von meinem Professor kontrollieren lassen. Wir konnten keine Fehler finden.
Trotzdem zweifel ich das Ergebnis noch an, da ich wie schon erwähnt die Lösung von Tanzbär und Leo plausibler finde.
Meinen Professor will ich jetzt erst einmal nicht mehr länger damit konfrontieren, darum fände ich es super, falls ihr euch in einer freien Minute die Lösung bei einem Bierchen mal anschauen könnte und berichten was er dazu meint.
Falls es erforderlich ist, kann ich die erste (jedoch vermutlich falsche) Lösung gerne nochmals posten. Danke schonmal und Grüße
Matthias P.S.: Wie Tanzbär schon erkannt hat ist auf Seite 1 ein Fehler zu finden. Die Beschleunigung x3 muss x heissen, dann passt es auch wieder auf Seite 2 ------------------
Treffen sich ne Null und ne Acht. Sagt die Null: "Hey schicker Gürtel" Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de