| | |
 | SchraubTec Bochum - Die regionale Fachmesse für Schraubverbindungen, eine Veranstaltung am 30.09.2026
|
|
Autor
|
Thema: Lagerung Roboter tisch (3237 mal gelesen)
|
wuptal
Mitglied
student

   Beiträge: 28
Registriert: 29.07.2009
|

 erstellt am: 17. Jan. 2012 19:24
erstellt am: 17. Jan. 2012 19:24  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo, ich konstruiere grade für die Uni einen Roboter. Ich habe ein Problem mit der Lagerung des Roboters und zwar mit der Achse die sich um die Z Achse dreht. Also so dass er sich um sich selbst drehen kann.
Ich wollte eigentlich ein Drehtischlager nehmen, aber die sind alle unverschämt teuer. Und ein weitere Problem meiner Konstruktion ist die geforderte genaue Fertigung.
Denn ich habe einen Unterbau und den Oberbau dazwischen wäre mein Drehtischlager.
Der Robiter wird durch drei Motoren bewegt die jeweils in der Achse sitzen müssen. Dieser Motor müsste auch mit dem Unterbau und dem Oberbau verschraubt werden. Also wenn jemand eine Idee hat wie man es geschickt Lagern kann. Wie gesagt es geht nur um die Lagerung in Z Achse. Ich hoffe es ist verständlich, was ich meine? Danke euch! Gruß wuptal Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ThoMay
Ehrenmitglied V.I.P. h.c.
Konstrukteur

Beiträge: 5260
Registriert: 15.04.2007 SWX 2019
Windows 10 x64
|
erstellt am: 17. Jan. 2012 19:33 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal 
Hallo und einen guten Start in den Tag wuptal. Du schreibst:
Zitat:
ich konstruiere grade für die Uni einen Roboter.
Cool echt.
Ich habe gerade für eine Uni einen Roboter gekauft.
Dies nach den Auswahlkriterien:
max. Gewicht an der Hand
Max Geschwindigkweit.
Widerholgenauigkeit der Bewegungen. => Daraus resulieren:
Gewicht, Drehzahl, Genauigkeitsklasse der Lagerung, Berechnung der Lagerbeslastung, Lebensdauer,..... Will ganz einfach sagen.
Recht dürftige Angaben von dir ergebn hier nicht ganz passende Antworten. Sei bitte so nett und lies dir die Verweis meiner Fußzeile mal durch => vor allem Richtig fragen. Gruß
ThoMay
------------------
Hast du Fragen?
Brauchst du 
Schaut mal nach im Bereich
Alle Foren => Wissenstransfer.
oder
Konstrukteure Online hier bei CAD.de
Richtig fragen -
Nettiquette - Konstruktionshilfen - Systeminfo - Unities - CAD Freeware - Forenübersicht - 3D Modelle - SolidWorks Videos Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Doc Snyder
Ehrenmitglied V.I.P. h.c.
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen

Beiträge: 13772
Registriert: 02.04.2004 Autodesk Inventor
|
erstellt am: 17. Jan. 2012 19:59 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
Moin! Schau Dir die für solche Anwendungen üblichen Kreuzrollenlager an und bau eins nach! Die Rollen kann man preiswert kaufen; der Rest sind nur 3 Bauteile. Das ist dann auch mit minimalem Aufwand spielfrei einstellbar. Wenn der Roboter keine Höchst- und Dauerleistung bringen soll, reicht normaler bis etwas besserer Stahl ohne teure Wärmebehandlung, wobei wir damals an der RWTH-Aachen ähnliches Zeug für kein Geld bei befreundeten Instituten sogar Ion-nitrieren lassen konnten. ------------------
Roli
www.Das-Entwicklungsbuero.de [Diese Nachricht wurde höchstwahrscheinlich nach ihrer Erstellung von Doc Snyder noch ein Mal editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
wuptal
Mitglied
student
Beiträge: 28
Registriert: 29.07.2009
|
erstellt am: 17. Jan. 2012 20:20 <-- editieren / zitieren --> Unities abgeben:
Hallo, danke für die schnellen Antworten. Die Idee ein Kugellager selber zu bauen wäre eine gute Idee. Nur leider ist esmir nicht ganz klar wie ich es aufbauen soll. Daher suche ich noch nach einer "Anleitung". Lagerung und motor werden auf eine Platte geschraubt, was es "überbestimmt" machen wird/ könnte bei schlcheter Fertigung, daher suche ich dafür auch noch eine Idee. Danke Gruß wuptal [Diese Nachricht wurde von wuptal am 17. Jan. 2012 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
GWS
Ehrenmitglied V.I.P. h.c.
Konstrukteur Sondermaschinenbau

Beiträge: 2454
Registriert: 23.07.2001 Zurzeit kein CAD zur Verfügung
|
 erstellt am: 18. Jan. 2012 09:17 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
erstellt am: 18. Jan. 2012 09:17 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
|
ulrix
Mitglied
Maschinenbauingenieur
Beiträge: 744
Registriert: 10.07.2007 Core 2 Duo 2,13 GHz / 2GB RAM
GeForce 7900 / 256 MB
Space Navigator
XP Pro SP2
AIS 2010
|
erstellt am: 18. Jan. 2012 12:32 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
|
wuptal
Mitglied
student
Beiträge: 28
Registriert: 29.07.2009
|
erstellt am: 20. Jan. 2012 12:40 <-- editieren / zitieren --> Unities abgeben:
Ja das mag sein aber das Probem es soll spielfrei sein. Und das einzige Lager welches ich gefunden habe ist von INA/FAG und kostet 1500 aufwärts. Das ist der Uni zu teuer! Nun suche ich eine andere Möglichkeit.
Vielleicht muss mann auch kein Kugellager verwenden!? Hat jemand vielleicht eine andere Idee es zu lagern? Danke euch gruß wuptal Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ThoMay
Ehrenmitglied V.I.P. h.c.
Konstrukteur
Beiträge: 5260
Registriert: 15.04.2007 SWX 2019
Windows 10 x64
|
erstellt am: 20. Jan. 2012 13:32 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
|
wuptal
Mitglied
student
Beiträge: 28
Registriert: 29.07.2009
|
erstellt am: 20. Jan. 2012 14:08 <-- editieren / zitieren --> Unities abgeben:
|
peter2308
Mitglied
Beiträge: 328
Registriert: 16.12.2004 ACAD 2010 Mec
Inv 2010 Subscr.
Vista 64
|
erstellt am: 20. Jan. 2012 14:11 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
|
wuptal
Mitglied
student
Beiträge: 28
Registriert: 29.07.2009
|
erstellt am: 20. Jan. 2012 15:12 <-- editieren / zitieren --> Unities abgeben:
|
wuptal
Mitglied
student
Beiträge: 28
Registriert: 29.07.2009
|
erstellt am: 20. Jan. 2012 15:21 <-- editieren / zitieren --> Unities abgeben:
Hallo, das Problem ist nun, dass dieses Lager ein maximales Kippmoment von 1000Nm verkraftet.
Wie rechne ich es sinnvoll aus? Muss ich dabei nicht auch die beschleuningung der Motoren beachten? Gruß wuptal Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister

Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 21. Jan. 2012 11:53 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
Hallo, Du gehst schon recht frischfröhlichblauäugig an die Sache ran, aber was solls... Eine Lagerung spielfrei hinzubekommen ist ja keine Hexerei, das gelingt sogar mit klassischen Kugellagern, noch leichter mit Schulterkugellager, Kegelrollenlagern, usw.
Der Hauptgrund warum bei Robotern (als unterste Achse) meist ein Drehkranz verwendet wird dürfte der Platzverbrauch sein, und eben darum gibts solche Drehkränze auch gleich mit verzahnten Ringen (Aussen- oder Innenverzahnung).
So eine Einheit kostet viel, bringt aber auch viel. Aber die schwierigere Aufgabe beim Erreichen der Wiederholgenauigkeit liegt eher bei eben jener Verzahnung, also bei der letzten Getriebestufe.
Wenn Du 0,05mm Gesamt-Wiederholgenauigkeit haben willst musst Du Dich ganz schön anstrengen, da darfst Du nirgendwo, bei keinem Element, auch nur ein Hundertstel verschlampen, da muss nicht nur (nahezu) Alles spielfrei sein, sondern da musst Du Dich auch mit der Elastizität/Nachgiebigkeit ausführlich beschäftigen. Und ja, auch die Dynamik spielt eine Rolle.
Insgesamt ist es ein iterativer Prozess:
Du musst einen groben Entwurf analysieren, Konstruktion verändern/optimieren, dann wieder mit den neuen Werten analysieren, usw.
Natürlich kommst Du wesentlich schneller zum Ziel wenn Du Dir ein paar passende Roboter div. Hersteller vorher etwas genauer anschaust, dann wirst Du Dir ein paar der ersten Iterationsschritte sparen können. ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
tuxometer
Mitglied
Beiträge: 271
Registriert: 05.10.2006 Inventor 2011 Pro;
Win 7 Pro;
|
erstellt am: 21. Jan. 2012 15:37 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
Hallo, Zitat:
das Problem ist nun, dass dieses Lager ein maximales Kippmoment von 1000Nm verkraftet.
Wie rechne ich es sinnvoll aus?
1000Nm sind ja nicht gerade viel.
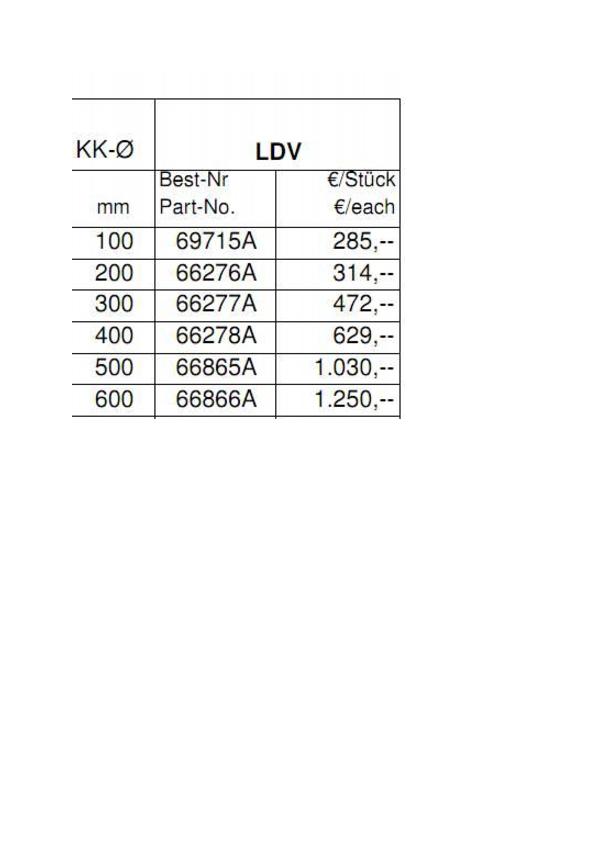
Ich habe mal eine Drehverbindung mit INA-Nadellagern für einen Roboterarm selbst gebaut.
Die Nadellager sollten recht günstig zu bekommen sein (je nach Abmessung), die
Spielfreiheit axial (bzw. geringe Vorspannung) wurde eingeschliffen.
Der Arm bewegt sich heute noch 
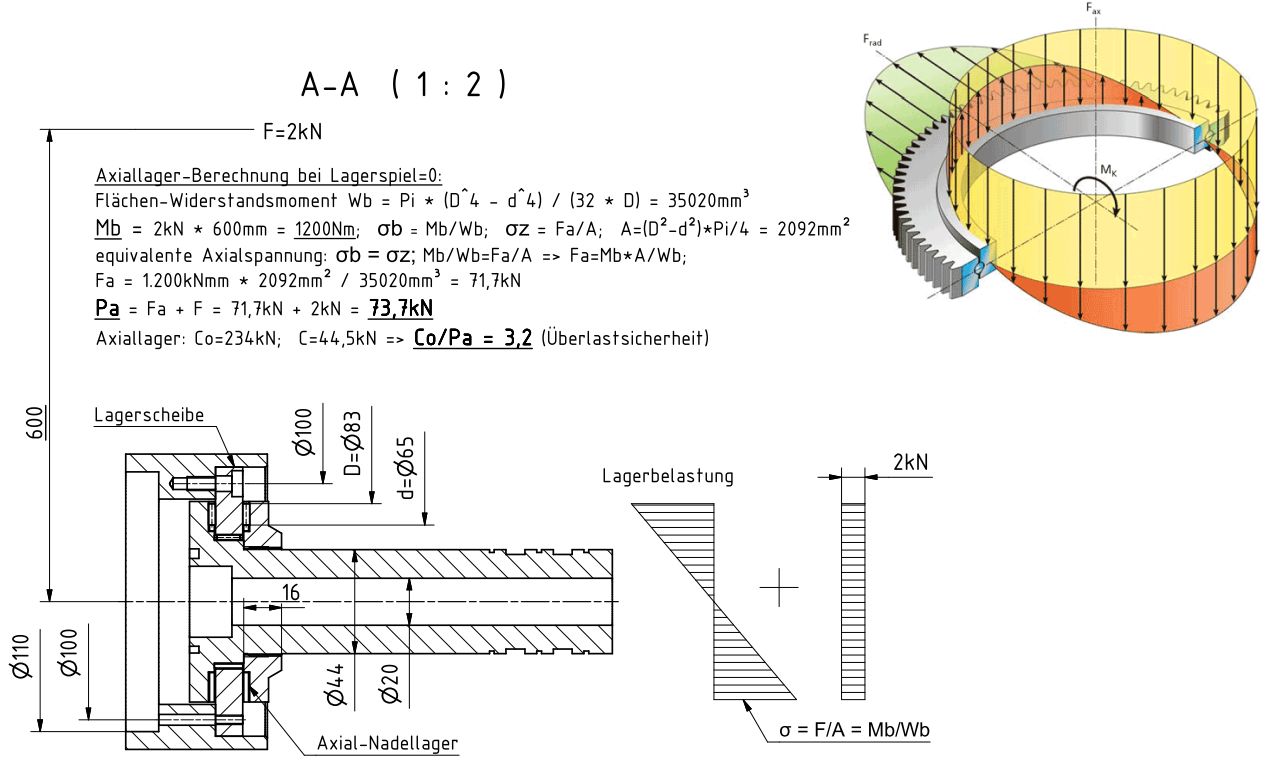
Die Berechnung (wie im Anhang dargestellt) hab ich mir selbst ausgedacht,
deshalb ohne Gewähr  ------
Erich
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
wuptal
Mitglied
student
Beiträge: 28
Registriert: 29.07.2009
|
erstellt am: 22. Jan. 2012 19:42 <-- editieren / zitieren --> Unities abgeben:
|
GWS
Ehrenmitglied V.I.P. h.c.
Konstrukteur Sondermaschinenbau
Beiträge: 2454
Registriert: 23.07.2001 Zurzeit kein CAD zur Verfügung
|
erstellt am: 23. Jan. 2012 12:49 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
Zitat:
Original erstellt von wuptal:
Könntest du mir noch ein paar Tipps geben zum eigenbau?Danke für deine berechnung, leider hilft mir die noch nicht viel ;-)
Irgendwie wäre es an der Zeit, dass du in Vorleistung gehst: Du konstruierst etwas, legst deine Berechnungen dazu dar, stellst es vor, lässt es von uns bewerten. Hier lesen hauptsächlich Profis mit, denen du Zeit (und damit Geld) stiehlst, nur weil du deine Hausaufgaben nicht machen willst. (Oder deine Vorlesung verschlafen hast) Sorry, das musste ich mal los werden. Günter [ein paar Rechtschreibfehler gegen andere ausgetauscht]
[Diese Nachricht wurde von GWS am 23. Jan. 2012 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
wuptal
Mitglied
student
Beiträge: 28
Registriert: 29.07.2009
|
erstellt am: 24. Jan. 2012 19:20 <-- editieren / zitieren --> Unities abgeben:
|

 Foren auf CAD.de
Foren auf CAD.de