Zitat:
Original erstellt von diyex:
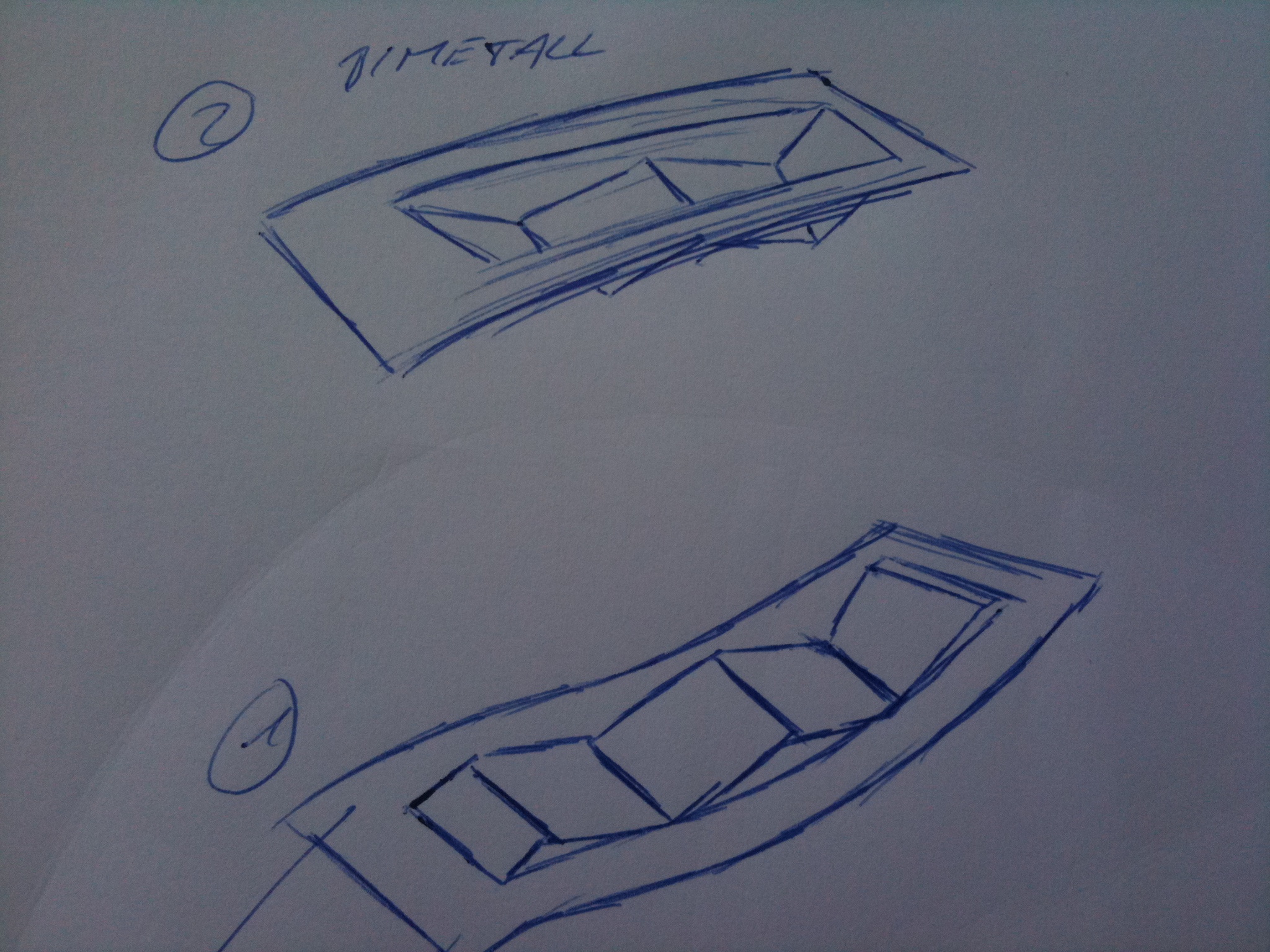
Guten Abend liebes Forum,da ich gerade versuche eine Idee umzusetzen stoße ich auf folgendes Problem (1. [d.A]).
Ich möchte wie man aus den Bilder hoffentlich sehen kann, ein Biegemetall so gestalten- das es sich in die andere Richtung verformt. (2. [d.A.])
Man kennt so etwas von Knackfröschen oder auch Bonbondosen. (2a. [d.A.})
Drückt man drauf und es macht klick ändert sich die Richtung. (3. [d.A.])
Nun die Frage:
Welches Material eignet sich hierfür am Besten und welche Stärke. (4. [d.A.])
Das skizzierte Bauteil hat ein maß von 80mmx40mm.
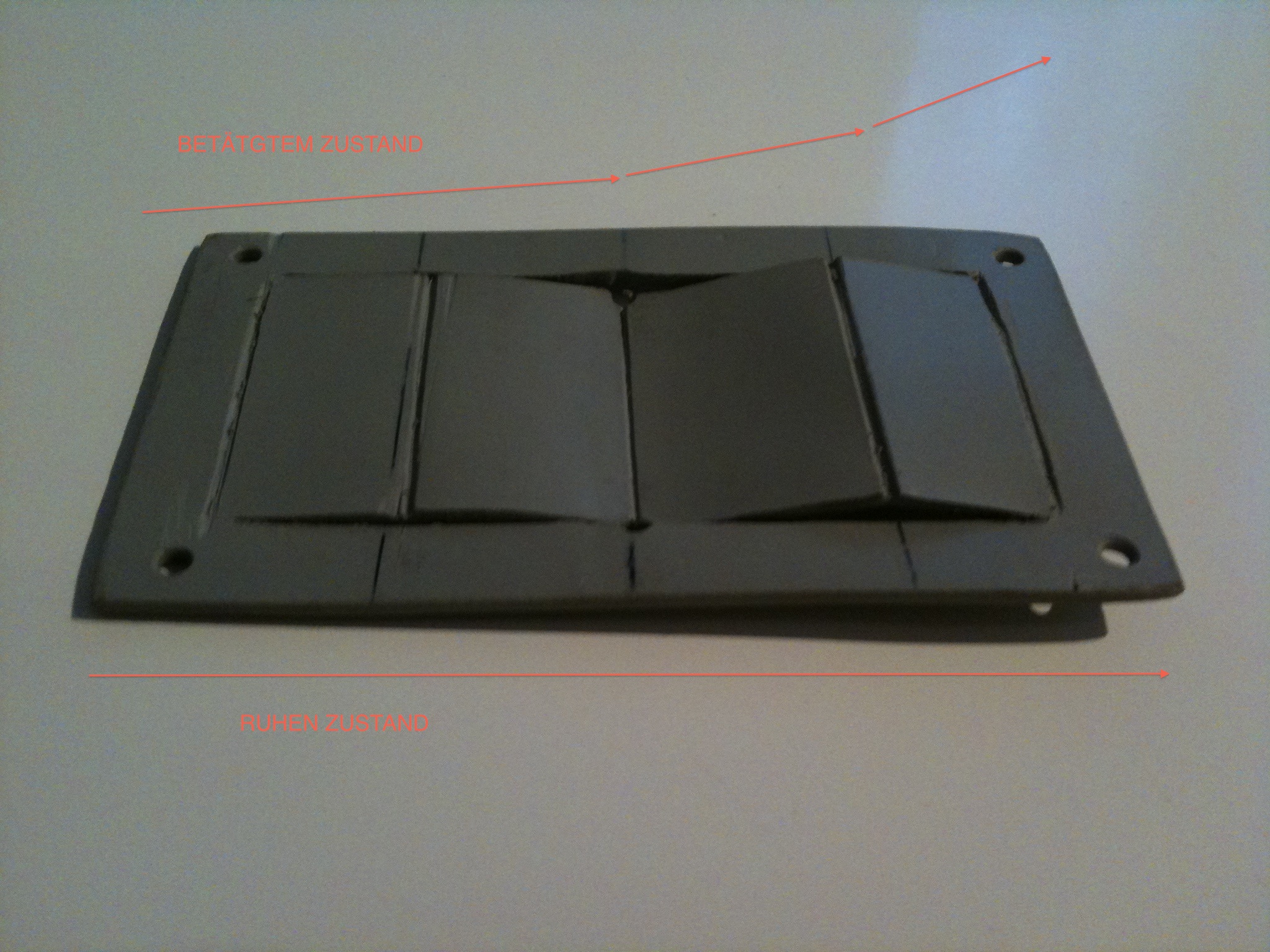
Hab auch ein Modell aus Kunststoff gemacht aber das ging in die Hose, wäre Kunststoff überhaupt denkbar?
(5. [d.A.])
danke für eure Hilfe.
Fehlerkorrektur: Im nachhinein sieht man doch dumme Fehler --- "copy and waste" lassen grüßen.
1) Studi MB hat wohl ein eher grundlegendes Problem. Er hätte in Elastizitätstheorie (bzw. Elastzitätstheorie III) aufpassen sollen, noch schlimmer, man hätte sie ihm lehren sollen. So hat er jetzt wirklich ein Problem, leider!
Wenn Deine Frage sich auf eine Studienleistung bezieht, dann gib die folgende Hilfestellung bitte an, zu Deiner eigenen Sicherheit.
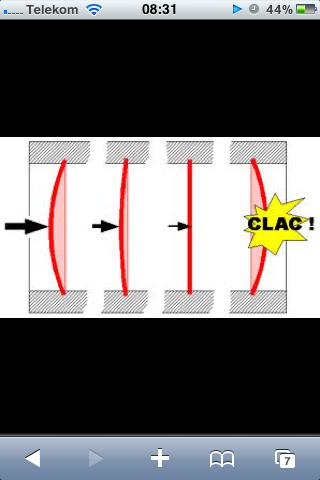
2) Deine Frage ist nicht präzise formuliert, Deine Skizzen wiedersprechen ggf. Deinen formulierten Ansprüchen. Ich muss hier Ansätze aus der Stabilitäts- und Potentialtheorie benutzen, ansonsten bleibt die Darstellung wirr. Unter der Annahme, dass die Dicke der Pfeile den Betrag der Karft zur Auslenkung darstellen sollen:
Die Ausgangsposition ist sicher stabil, es wird eine Kraft benötigt, um die Konstr. auszulenken.
Die Position "CLAC" ist undefiniert. Die angegebene Kraft zur Auslenkung ist hier Null, dies ist eigentlich physikalisch unsinnig.
3) Benötigt die Position "CLAC" eine der usprünglichen Kraft entgegengesetzte Kraft (also nach links gerichtet) (A), um die Ausgangsposition wieder zu erreichen, oder muss die ursprüngliche (nach rechts gerichtete Kraft) Null anehmen, um die Ausgangsposition zu erreichen (B).
Im Fall A sind beide Positionen stabil, Du hast also ein bistabiles System. Im Fall B ist die Position B nur metastabil, Du hast nur ein insgesamt monostabiles System. Welches willst Du?
Der Zustandsübergang "Ausgangsposition" nach "CLAC" benötigt immer eine Kraft, und damit eine Energie (Kraft entlang eiens Weges). Diese wird immer gespeichert. Im Fall A ist sie im Zustand "CLAC" <EDIT> teilweise (Falsch: "vollkommen") dissipiert (in Wärme und Schall umgewandelt), im Fall B überhaupt nicht (falsch: "nur teilweise". </EDIT>
Der Zustandübergang "CLAC" nach "Ausgangsposition benötigt im Fall A) den <EDIT> einen, ggf. gleichen Energieeinsatz >/EDIT> wie oben, es gilt alles das gleiche. Im Fall B) erlaubt das Wegfallen der äusseren Kraft den Zustandübergang "CLAC" nach "Ausgangsposition", die restliche, (elastisch) gespeicherte Energie wird <EDIT> vollkommen </EDIT> dissipiert (in Wärme und Schall.)
<EDIT> In Sicherheitsgerichteten Anwendungen darf nur ein Zustand global stabil sein, definitionsgemäß der "sichere", meist der mit der geringsten gespeicherten Energie, dem geringsten Potential etc. ... Dies wird erreicht, indem die anderen Zustände (hier Dein "CLAC") immer ein höheres Potential haben als der sichere Zustand, hier Deine Ausgangsposition. </EDIT>
4) Damit können wir auch eine Werkstoffauswahl treffen: Der Werkstoff muss die für die Zustandübergänge benötigte Energie elastisch speichern können. Wie viel das ist, hängt von Deiner Konstruktion ab, wie steif sie ist und wieviel Auslenkung sie haben soll....Da das letztendlich ein Federproblem ist, setzte man üblicherweise Federmaterialien ein, für Knackfrösche Teifziehblech, das durch Umformen aushärtet, für Stellglieder in mechanischen, bistabilen Ventilen Federbleche (Stahl, rostfreier Stahl, CuBe).
5) Soweit obiges Kriterium erfüllt bleibt, kannst Du die Konstruktion sicher auch aus, ggf. (faser-)verstärkten, Kunststoffen einschliesslich Elastomeren machen.
mfg HA
[Diese Nachricht wurde von adamsh am 07. Sep. 2010 editiert.]
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de