Hallo Zusammen! Ich bin Andreas und seit kurzem an meiner Maschinenbau Bachelorarbeit im Bereich Roboter Simulation beschäftigt.
Nachdem ich jahrelang stiller Mitleser war, habe ich heute beschlossen mich im Forum anzumelden. Ich hoffe, dass bei meinem Problem weitergeholfen wird und ich in Zukunft auch die ein oder andere Frage beantworten kann.
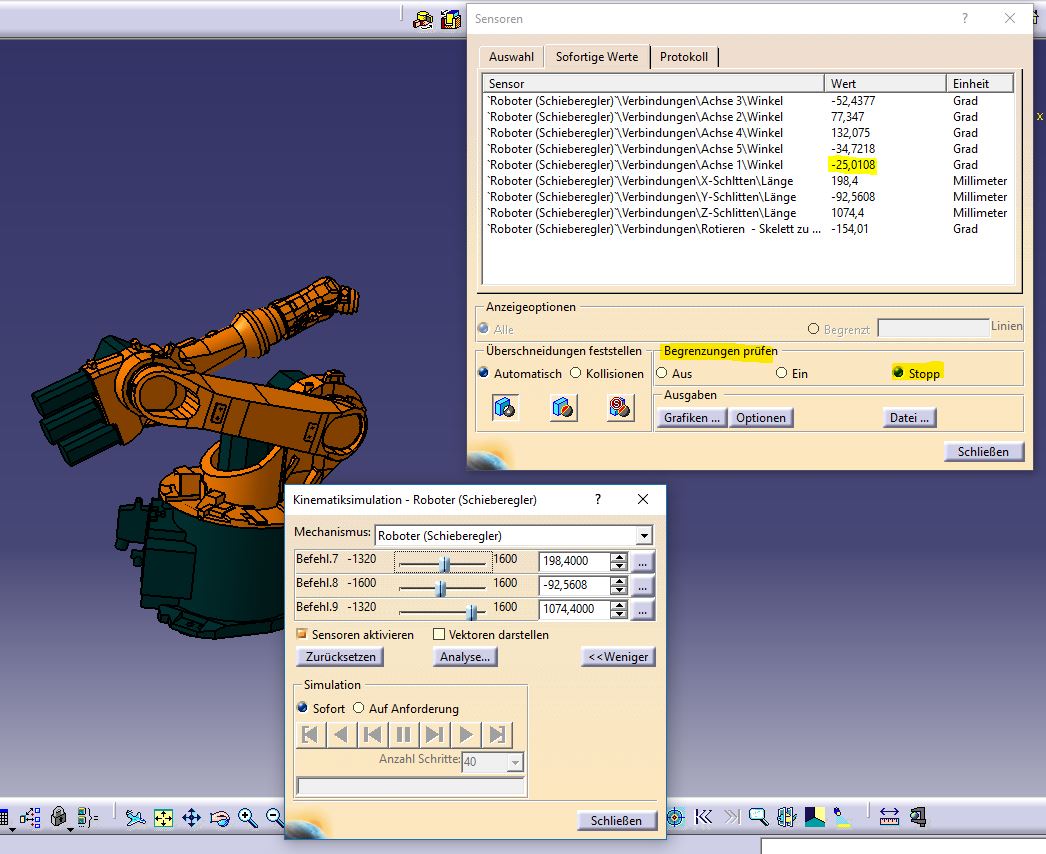
Ich habe in CATIA DMU Kinematiken einen 6 Achs KUKA Roboter erstellt, welcher sich über die einzelnen Achswinkel, innerhalb deren Grenzen steuern lässt. Die 7. Achse stellt sein Tool dar, welches schwenkbar ist.
Soweit funktioniert das auch ganz schön. Leider ist es wenig praktikabel, da man ja nicht gezielt in x,y,z Richtung fahren kann, sondern lediglich die einzelnen Achsen ansteuert. Gezielt Positionen anfahren ist schier unmöglich.
Ich habe mir hierzu 3 prinzipielle Möglichkeiten überlegt, welche jedoch entweder wenig praktikabel sind, oder an der Umsetzung scheitern:
1.) Mit dem Kompass das Tool des Roboters an eine gewünschte Stelle verschieben, anschließend fixieren und danach den Roboter aktualisieren. Führt dazu, dass der Roboter die Achswinkel so einstellt, dass er das Werkzeug erreicht. Wenig praktikabel, ehrlich gesagt sogar ziemlich nervig. Man muss dauernd zwischen den Oberflächen DMU und Assembly Design hin und her springen und sich meistens in extrem kleinen Schritten weiterangeln, da der Roboter ansonsten Konfigurationen einnimmt, welche zum Crash führen.
Den Kompass mit gedrückter shift Taste bewegen und so Bedingungen beizubehalten ist kaum machbar. Er lässt sich dabei in manche Richtungen gar nicht erst bewegen und "springt" dann plötzlich extrem weit.
2.) Schöner wäre eine Möglichkeit das Tool, also das "Ende" des Roboters in alle 3 Raumrichtungen innerhalb der DMU Kinematik Umgebung simulieren zu können, während der restliche Roboter dem ganzen mit Achsbewegungen "folgt", ohne dass sich seine Base verschiebt. Wie das ganze (evtl. mit Dummy Parts für die einzelnen Raumrichtungen) umsetzbar sein könnte weiß ich jedoch nicht. Prinzipiell müsste es eine simple Manipulation des Tools sein, welche lediglich durch die Achswerte des Roboters begrenzt wird.
3.) Was ebenfalls eine nette Alternative wäre, ist die Möglichkeit das Tool entlang einer Raumkurve zu bewegen, während der Roboter folgt:
https://www.youtube.com/watch?v=FLWVpRChRso
Auch hier sind meine CATIA Kentnisse leider überstiegen.
Entschuldigung für den langen Post. Ich hoffe mein Problem ist dadurch klar und mir kann auch durch meine kleinen Ansätze weitergeholfen werden. Vielen herzlichen Dank schon mal im Voraus.
PS: CATIA Delmia ist ein mir bekanntes Programm. Leider habe ich im Rahmen der Abschlussarbeit keinen Zugriff auf die Lizenz. Wenn jemand weiß, ob und wie man als Student an eine Educational Lizenz oder dergleichen kommen kann würde ich mich freuen.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|