| | |
 | Wie eine leistungsfähige Visualisierung das Model Based Enterprise , eine Pressemitteilung
|
|
Autor
|
Thema: Sub-Mechanismen verbinden (10997 mal gelesen)
|
Dede
Mitglied

   Beiträge: 29
Registriert: 20.04.2004 DMU Fitting - V5R18
|

 erstellt am: 08. Okt. 2004 15:48
erstellt am: 08. Okt. 2004 15:48  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo, möchte noch einmal ein schon altes Problem aufgreifen: http://ww3.cad.de/foren/ubb/Forum136/HTML/000083.shtml In meinem Fall möchte ich die Öffnung einer Motorhaube simulieren. Dazu habe ich ein Viergelenk und eine Gasfeder (die Gasfeder ist an einer Seite an dem Viergelenk befestigt und dreht an dem anderen Ende um eine feste Achse), die sich per Kinematik-Bedingungen bewegen sollen. Zusammen in einem Part mit einem Mechanismus läuft es einwandfrei.
Jetzt möchte ich aber Gelenk und Gasfeder in getrennten Parts und mit getrennten Mechanismen erstellen. Das Viergelenk alleine läßt sich auch simulieren. Die Gasfeder erhält von mir nur eine Prismatic-Bedingung.
Nun möchte ich in einem Zusammenbau(Product) Viergelenk und Gasfeder zusammenbringen. Ich möchte dann die beiden Sub-Mechanismen importieren und mit einem übergeordneten Mechanismus simulieren. In dem übergeordneten Mechanismus würde dann die Verbindung zwischen Gasfeder und Viergelenk (Spherical-Joint) und die Anbindung der Gasfeder um die feste Achse (Cylindr-Joint) definiert werden müssen. Wer weiß Rat, wie ich meine Sub-Mechanismen verbinden kann ?
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Stekolschik
Mitglied
Dipl.-Ing.
Beiträge: 54
Registriert: 07.02.2004 Windows XP
512 MB Speicher
DELL Precision M60
NVidia FX Gp 1000
|
 erstellt am: 11. Nov. 2004 10:06 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
erstellt am: 11. Nov. 2004 10:06 <-- editieren / zitieren --> Unities abgeben: Nur für Dede 
Hallo, man kann die Mechanismen nicht verbinden. was man machen kann:
1. Dress-UPs definieren (so dass bei der Bewegung eines Mechanismus die in DRESS-IP definierten Teile mitgenommen werde)
2. Simulation definieren, in der 2 Mechanismen die Bestandteile sind. Gruß, Alexander ------------------
__________________________________ Dipl.-Ing. Alexander Stekolschik Wissenschaftlicher Mitarbeiter
Ruhr-Universität Bochum, Lehrstuhl für Maschinenbauinformatik (ITM) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
busdi
Mitglied
Beiträge: 60
Registriert: 27.10.2004
|
erstellt am: 15. Apr. 2005 14:10 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
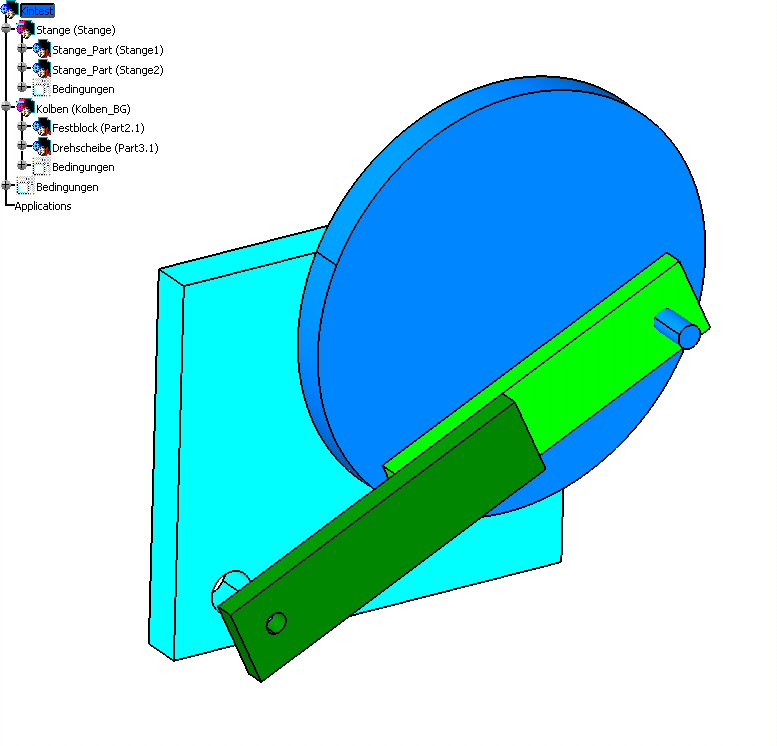
Das ermöglicht aber nur starre Verbindungen. Die möglichkeit einer Flexiblen Verbindung zwischen Mechanismen ist so nicht möglich. z.b.: -Drehung einer Kurbelwelle zu einem Fixpart im einen Produkt mit Kin. -der Kolben mit Kin (Ein/Ausziehbar) in einem 2. Produkt -dir Verbindung der beiden funkionen in einem Überprodukt (siehe Anhang) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 15. Apr. 2005 17:12 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Die Frage ist immer noch: Lassen sich zwei oder drei Mechanismen verbinden ? Meines Wissens nach nicht. Das Dressup hat uebrigens keinesfalls die gewuenschten Effekte, wenn man zwei voellig verschiedene Bewegungen miteinander ablaufen lassen will, denn raeumliche Entfernungen haben auch andere Verfahrwege an bestimmten Stellen zur Folge - also DRESSUP ist immer nur moeglich, wenn sich die geometrie wirklich genauso, um die gleichen punkte etc. bewegen wie die fuer die Kinematik herangezogenen Elemente es tun. (Das nur als kleiner Einwurf dazu). Gruss
Catrin ------------------
CATIS GmbH 38444 Wolfsburg
catrin.eger@catis.de www.catis.de
 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Daedalus321
Mitglied
Student Maschbau
Beiträge: 38
Registriert: 20.04.2005
|
erstellt am: 06. Mai. 2005 11:21 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Komisch, das es da keine Lösung zu geben scheint ... Also ich hab ein ähnliches Problem Ich habe einen Werkstattkran, der durch einen Zylinder bewegt wird.
Den Zylinder habe ich als Produkt aus zwei Unterprodukten in das Hauptprodukt eingefügt. Die nötigen Drehbewegungen der Gelenke (Gestell-Ausleger , Zylinder-Ausleger , Zylinder-Gestell alle als Gabel-Stange Verbindung mit Bolzen) sind nun im Hauptprodukt. Die Verschiebung des Kolbens im Zylinder ist im Unterprodukt. Wenn ich nun den Submechanismus importiere ist es mir nicht möglich das Ausfahren des Zylinders und die Drehung der drei Gelenke miteinander zu kombinieren. Es scheint nur dann zu funktionieren, wenn ich den Zylinder und die Koblenstange als getrennte Produkte im Hauptprodukt Einfüge. Vielleicht wer nen Tipp? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
cybexx
Mitglied
wiss. MA
Beiträge: 36
Registriert: 06.05.2005
|
erstellt am: 16. Jun. 2005 09:35 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Tja und auch ich plage mich mit diesem Problem und weiß noch keinen Rat: In einem Ober-Product sind (u.a.) mehrere (viele) gleiche "Förderbänder" als Unter-Product mit Mechanismus zum Bewegen des Bandes (derzeit: der Antriebswelle). Im Haupt-Product ist ein Mechanismus, der die Anlage steuert. Ich schaffe es aber nicht Winkelgeschwindigkeit oder Verfahrweg an die Mechanismen der Unterprodukte (Förderbänder) zu übergeben. Auch ich wäre für einen Rat dankbar.... Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Knowledge
Mitglied
Dipl. Ing.
Beiträge: 106
Registriert: 02.03.2004
|
erstellt am: 17. Jun. 2005 12:54 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Liebe Leute, das verbinden von zwei kinematiken ist gar kein Problem. Man nehme zwei Mechanismen und setze die kinematische Zeit von einem der beiden Mechanismen als Steuernde Größe an. Die Verbindung der Kinematiken kann nun mit Hilfe einer Regel erfolgen, die die Abläufe der verschidenen Antriebe zweitlich miteindander verkettet.
Wenn kinematikzeit zw. 1 und 10 s, dann Antrieb 1 Mechanismus 1 bewegen. Wenn Kinematikzeit zw. 5 und 15s, dann Antrieb 1 Mechanismus 2 bewegen... usw.
Mit einer solchen Regel verkette ich dann die kinematischen Abläufe.
Einziges Manko: diese Methode ist etwas undurchsichtig. Wenn du Probleme bei der Umsetzung hast, dann mekde dich doch. Du brauchst im Übrigen die Lizenz KWA. vlg Ralf
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
stengel
Mitglied
Beiträge: 7
Registriert: 12.11.2003
|
erstellt am: 13. Jul. 2005 17:14 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Hallo, das habe ich nicht ganz verstanden.
Ich habe folgendes Problem:
in Produkt p_1 sind die Produkte p_1_1 und p_1_2 mit den Mechanismen m_p_1_1 und m_p_1_2.
Nun möchte ich im Produkt p_1 einen Mechanismus m_p_gesamt erstellen, der die beiden anderen Mechanismen beinhaltet, also beide nach EINER Zeit mit Regeln simuliert werden (gleichzeitig). Ist dies damit möglich?
(Ohne natürlich einen Mechanismus komplett neu erstellen zu müssen.)
Wenn ja, wäre ich für einen kleinen Hinweis dankbar. Gruß
Gregor
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
cybexx
Mitglied
wiss. MA
Beiträge: 36
Registriert: 06.05.2005
|
erstellt am: 14. Jul. 2005 08:08 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Hallo, Laut Knowledge müßte das über die Verbindung der Simulationszeit (KinTime) gehen, ich hab's aber bis jetzt nicht resproduzieren können. Einen klassischen, "ofiziellen" Weg gibt's leider nicht. Vieleicht hat ja jemand ein einfaches Beispiel zum Vorschlag von knowledge, das man hier hochladen könnte? Grüße cybexx Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
corso
Mitglied
Dipl.-Ing. (FH)
Beiträge: 206
Registriert: 18.08.2004 R14 SP5 HF30
|
 erstellt am: 14. Jul. 2005 08:16 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
erstellt am: 14. Jul. 2005 08:16 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Hallo! Wenn ich Knowledge's richtig verstanden habe, dann gibts zu der KWA-Verkettungs-Geschichte noch eine weitere Alternative. Die Lösung hierbei heißt "Sequence", und ist unter dem DMU-Player zu finden, insofern man eine weitere Lizenz gezogen hat (z.B. DMN - DMU Navigator oder FIT - DMU Fitting). Hier kann man nun (leider nur mit Laws behaftete Mechanismen oder aber gespeicherte Simulations) zeitlich zueinander anordnen, inclusive Verzögerungen. Die Beschreibung des Befehls findet sich im übrigen in der DMU Fitting Doku. Gruss
Matthias Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
corso
Mitglied
Dipl.-Ing. (FH)
Beiträge: 206
Registriert: 18.08.2004 R14 SP5 HF30
|
erstellt am: 11. Aug. 2005 15:46 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Hallo! Habe mich mit dem Thema nun etwas näher beschäftigt und muss meinen vorigen Beitrag etwas einschränken. Mit einer Sequence kann ich Mechanismen nur als komplette Einheit miteinander/nacheinander laufen lassen. Selektives Verfahren von verschiedenen Commands, welche nur in einem Zeitabschnitt einer steuernden KINTime-Variable verfahren werden, bekommt man mit einer Sequence nicht hin. Ich habe nun natürlich versucht, die Methode von Knowledge mit der Rule zu reproduzieren, bin aber nicht zum Ziel gekommen. Das Verknüpfen von Zeitvariablen oder Commandvariablen verschiedener Mechanismen mit der steuernden Zeitvariable eines Mechanismus hat hat zwar funktioniert, jedoch will mir die synchrone Simualtion der Mechanismen nicht gelingen. Es bewegt sich immer nur der eine Mechanismus, dessen Zeitvariable ich zum Steuern verwendet habe. KNOWLEDGE: Bitte hilf uns da mal! Erklär bitte, wie Du Dein System zum Laufen gebracht hast. Vielleicht hast Du auch ein kleines Beispiel-Product, wo wir uns Deine Lösung mal anschauen können? Dieses Thema zieht sich nun schon so lange hin (der Thread ist ja schon bald 1 Jahr alt!!!), es wird glaub ich endlich mal Zeit für eine praktikable Lösung, meint ihr nicht auch?? Viele Grüsse aus München Matthias
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
cybexx
Mitglied
wiss. MA
Beiträge: 36
Registriert: 06.05.2005
|
erstellt am: 11. Aug. 2005 16:09 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Hallo zusammen, auch ich habe versucht die Sache weiter zu bringen aber bis jetzt leider völlig ohne Erfolg.
Folgender Versuchs"aufbau" kam zumn Einsatz:
- Ein Submechanismus (Subprodukt), bei dem eine Achse nach einem grafischen Law ausfährt
- Ein Obermechanismus (Produkt), bei dem sich eine Platte auf einem Zylinder dreht, ebenfalls über grafisches Law.
(--> Ergo ein Kran als Testobjekt :-) Die einzelnen Mechanismen bewegen sich wie im Law vorgegeben, nur beide zusammen waren leider nicht drin. Ich schließ emich corso an, wer da ein auch noch so kleines Beispielchen hat (idealerweise als Catia-Datei) sei herzlich eingeladen dieses zu posten (Knowledge?)- dafür geb ich alle meine Unities her :-) Danke im Voraus Grüße ebenfalls aus München [Diese Nachricht wurde von cybexx am 11. Aug. 2005 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
cybexx
Mitglied
wiss. MA
Beiträge: 36
Registriert: 06.05.2005
|
 erstellt am: 12. Aug. 2005 13:33 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
erstellt am: 12. Aug. 2005 13:33 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Anbei mal mein Testmodell (ohne die Regelkurve als grafisches Law) Ich stehe vor folgender Situation:
- Ich habe zwei Produkte mit jeweils definiertem und funktionierendem Mechanismus (Mast-Produkt und Ausleger-Produkt)
- Ich baue das Ausleger-Produkt in das Mast-Produkt ein Damit habe ich das Problem, daß der Ausleger-Mechanismus gar nicht mehr sichtbar ist und auch egal was ich mache nicht mehr erscheinen will. Ich müßte das neu definieren (was wir ja gerade nicht machen wollen). Endziel wäre es (unsinnig aber auf dieses Beispiel gemünzt) einen Masten als Hauptprodukt zu haben, auf dem ich n Ausleger montieren kann, die sich alle nach der Kintime des Haputmechanismus richten. Anbei auch noch ein Screenshot von zwei Regeln, mit denen ich sagen wir mal eine X und Y-Achse steuere. Darin sieht man schön wie man die steuernde Kintime festlegt (Rollomatik\Kintime). Rollomatik ist hier der Mechanismusname, wenn das Ganze in einem Submechanismus steht muß hier halt der name vom Hauptmechanismus mit rein. Viel Glück...:-) [Diese Nachricht wurde von cybexx am 12. Aug. 2005 editiert.] [Diese Nachricht wurde von cybexx am 12. Aug. 2005 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 12. Aug. 2005 14:23 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
cybexx, Du musst den mechanismus in das uebergeordnete Produkt importieren. Dafuer gibt es extra ein Icon. Damit uebernimmst Du aus einem Unterprodukt den Mechanismus. CATIA sucht alle Unterprodukte durch und importiert saemtliche in diesen enthaltene Mechanismen. Leider habe ich trotzdem immer noch keine Loesung gefunden, um diese Mechanismen miteinander zu verbinden. In V4 gab es KIENMAT - UNION - in V5 gibt es imho keine vergleichbare Funktion. Gruss
Catrin ------------------
CATIS GmbH 38444 Wolfsburg
catrin.eger@catis.de www.catis.de
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
cybexx
Mitglied
wiss. MA
Beiträge: 36
Registriert: 06.05.2005
|
erstellt am: 12. Aug. 2005 15:53 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
So, das muss doch zu schaffen sein, oder? Anbei nochmal der aktuelle Stand, da feht nur noch ein Mikrometer meine ich. Mal das "Mast_Produkt" öffnen. In diesem Das Oberprodukt mit dem Mast und das Unterprodukt mit dem Ausleger. Submachanismus ist importiert.
Die Kintimes sind abgestimme aber dazu noch später. Je nachdem ob man zuletzt im Hauptmechanismus oder im Submechanismus geklickt hat kommt - nach einem Klick auf "Simulation mit Regeln" - Der Simulationsdialog. Wenn man das dann laufen lässt bewegt sich halt leider nur EINER. Varianten: Formel im Submechanismus mit
- Mast\Kintime
- Unterprodukt\Kintime + Unterprodukt\kintime=Mast\Kintime
in allen Variationen: NÜSCHTS! --> funktioniert nicht. Die Kunst wäre jetzt also die Kintimes so zu verbinden, daß diese nicht nur den gleichen Wert beinhalten (wenn man beide gleichsetzt steht der Submechanismus immer auf dem Wert des Hauptmechanismus) sondern dann auch die Simulation so ausführen. So, ich mach heute erst mal Schluß, ein schönes langes WE allerseits!
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
kpr
Mitglied
Beiträge: 18
Registriert: 31.03.2005
|
 erstellt am: 06. Sep. 2005 21:51 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
erstellt am: 06. Sep. 2005 21:51 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Hallo Ich habe, so glaube ich, eine Lösung über die Sequenz. Die beiden Mechanismen in einer Sequenz hintereinander einfügen und dann "Nach oben zusammenfügen" drücken --> Beide Mechanismen laufen gleichzeitig ab. Siehe Beilage. Gruss René Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
cybexx
Mitglied
wiss. MA
Beiträge: 36
Registriert: 06.05.2005
|
 erstellt am: 07. Sep. 2005 09:29 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
erstellt am: 07. Sep. 2005 09:29 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
|
Daniel321
Mitglied
Beiträge: 13
Registriert: 12.10.2006
|
erstellt am: 09. Nov. 2006 19:52 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Ich habe ein ähnliches Problem. Ich hab ein Product mit 2 unterprodukten. Diese haben jeweils eine Kinematik, die aber völlig unabhängig voneinander ist. Ich habe einen Greifmechanismus und einen Schwenkmechanismus. Jetzt soll der Greifer auf den Schwenkmechanismus drauf und sich bewegen, wenn der Schwenkmechanismus den Flansch, an dem das Produkt "Greifer" angeflanscht ist, in Bewegung verstezt. Also in Produkt "Schwenkmechanismus" bewegt sich etwas und das Produkt "Greifer" soll sich einfach nur mit bewegen. Beide sind Unterprodukte von "Gelenk_Assembly". Die Mechanismen der beiden Unterprodukte wurden in "Gelenk_Assembly" importiert. Aber weiter weiß ich nicht. Danke für jede Hilfe. P.S.: CATIA V5 R16 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
busdi
Mitglied
Beiträge: 60
Registriert: 27.10.2004
|
erstellt am: 14. Nov. 2006 13:17 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
|
Siassei
Mitglied
MB - Student
Beiträge: 490
Registriert: 08.07.2007 SWX
NX 3 und höher ;)
Windows and UNIX
C, C++, Java, Phyton,...
|
erstellt am: 28. Feb. 2008 13:49 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Zitat:
jedoch kann man damit keine Submechanismen verbinden die sich Gegenseitig bedingen oder?
Interessante Frage die mich auch interessiert. Gibt es hierfür eine möglichkeit? [Edit]Weitere "ältere" Beiträge die sich mit diesem Problem beschäftigen[/Edit] ------------------
Hopfen und Mals
Gott erhalts  [Diese Nachricht wurde von Siassei am 28. Feb. 2008 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
HolländerD
Mitglied
Dipl. Ing.
Beiträge: 28
Registriert: 24.05.2005
|
erstellt am: 06. Mrz. 2008 09:55 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Hallo an Alle, mit Interesse lese ich immer wieder diese Fragen bzgl. verbinden von Submechanismen. Ich habe den Eindruck, daß sehr viel Zeit verwendet werden muß, um diese Aufgabe innerhalb von V5 zu lösen? Sehe ich das richtig?
Ich selbst beschäftige mich einem V5-integrierten Tool, welches auch dynamische Analysen zuläßt (also dem Trend weg von DMU hin zu FDMU folgt).
In diesem Tool, das auch als Add-on für V5 Nutzer angeboten wird (unterstützt 100% die parametrik und die Assoziativität), ist die Verbindung von Submechanismen eine Sache von 2 Minuten, oder im Skript ein 3Zeiler. Falls nun der Aufwand zum Verbinden solcher Submechanismen in V5 wirklich hoch ist zahlt sich die Investition in ein solches Tool sehr schnell aus. Abgesehen von der Vereinfachung der Verbindung von Submechs hat man auch noch die Option DYNAMISCHE Analysen durchzuführen. Gerade für z.B. Bauraumanalysen sehr hifreich... Gruß
------------------
LMS Deutschland GmbH
Dominique.Hollaender@lmsintl.com
<http://www.lmsintl.com> Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Siassei
Mitglied
MB - Student
Beiträge: 490
Registriert: 08.07.2007 SWX
NX 3 und höher ;)
Windows and UNIX
C, C++, Java, Phyton,...
|
erstellt am: 06. Mrz. 2008 16:34 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Servus, LMS, ja mit sicherheit ein tolles Tool. Doch sowas muss doch Catia auch selber können. Scheinbar kann sie's nicht  Wie sieht's denn bei diesen Produkt mit einer Version für einen fleissigen Student aus? MfG,
Thomas ------------------
Hopfen und Mals
Gott erhalts Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
HolländerD
Mitglied
Dipl. Ing.
Beiträge: 28
Registriert: 24.05.2005
|
erstellt am: 07. Apr. 2008 08:50 <-- editieren / zitieren --> Unities abgeben: Nur für Dede
Hallo, etwas verspätet....
Ja, es gibt auch Hochschulprogramme. Möglicherweise ist das Tool ja auch schon an Ihrer Hochschule verfügbar? Gruß ------------------
LMS Deutschland GmbH
Dominique.Hollaender@lmsintl.com
<http://www.lmsintl.com> Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|