Hallo,
in einem Verbrennungsmotor wird am Zylinderkopf ein Sensor integriert.
Selbstverständlich kann er nicht die Vorgänge im gesamten Zylindervolumen
detektieren, sondern nur im "realen Sichtkegel".
Zur besseren Vorstellung sei auf die Bilder verwiesen.
Aufgabe:
- das Volumen des Sichtkegels in Abhängigkeit vom Kurbelwinkel anzugeben
- die "koaxiale Eindringtiefe" (Distanz der Schnittpunkte, welche sich durch das Schneiden
der Rotationsachse des Sichtkegels mit der Kolbenfläche bzw. Sichtkegel-Stirnfläche.
Das ist deswegen etwas problematisch, da die Kolbenoberfläche nicht eben, sondern eine
omega-Mulde aufweist.
Aktueller Stand:
Ich konnte mit Hilfe von Pubizier-Geometrien von Kolben, Zylinderwand und Sichtkegel,
den realen Sichtkegel ableiten.
Allerdings weiß ich nicht, wie ich dem realen Sichtkegel ein Volumen zuweisen,
noch wie ich die axiale Eindringtiefe als KE festlegen kann um diese in Abh. vom Kurbelwinkel zu berechnen.
Als Stichwort fiel die "Sensitivitätsanalyse". Neben den zuvor genannten Problemen,
habe ich auch nicht herausgefunden, wie man bei dieser Analyse die Kurbelwelle drehen lassen kann.
Anbei noch zwei Bilder:
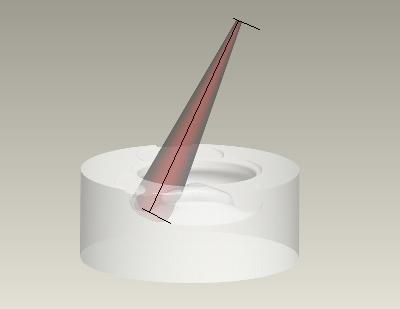
in rot wird der reale Sichtkegel dargestellt, dessen Volumen und koaxiale Distanz ich berechnen will
in Abhängigkeit vom Kurbelwinkel.
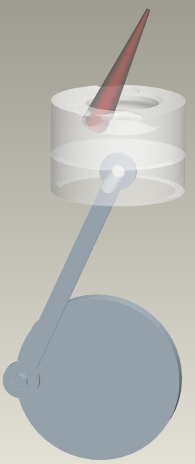
Im zweiten Bild sieht man noch die Kurbelwelle. Auf Grund einer Deachsierung möchte ich mich direkt
auf den Kurbelwinkel beziehen und nicht auf die Position des Kolbens.
Ich konnte mit den vorhanden Threads leider nicht so viel anfangen können, da ich in Sachen ProE ins
kalte Wasser geworfen wurde.
Deswegen wäre ich auch für Litaraturhinweise dankbar, die mein Problem mehr oder weniger erfassen.
Prinzipiell bin ich an Lösungen interessiert, die mich an meinem jetzigen Punkt abholen könnten.
Vorweg 2 Fragen:
- Ist die Bestimmung der beiden gesuchten Größen möglich?
- Befinde ich mich auf einem richtigen Weg?
Habe Zugriff auf: Wildfire 4.0 educational, Floating License
mit freundlichem Gruß
Michael
[Diese Nachricht wurde von eldi am 29. Mai. 2013 editiert.]
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
| 



























 Keine Panik, Du arbeitest mit Pro/E! Und Du hast cad.de gefunden!
Keine Panik, Du arbeitest mit Pro/E! Und Du hast cad.de gefunden! 
 Verwundert über die Antworten?
Verwundert über die Antworten?  Dann schnell nachfolgende Links durchlesen.
Dann schnell nachfolgende Links durchlesen.