| | |  | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für PTC CREO | | | |  | Neuer Geschäftsführer bei Software Factory GmbH, eine Pressemitteilung
|
|
Autor
|
Thema: mechanismus (808 mal gelesen)
|
ProEler01
Mitglied

   Beiträge: 13
Registriert: 04.04.2007
|

 erstellt am: 04. Apr. 2007 16:21
erstellt am: 04. Apr. 2007 16:21  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
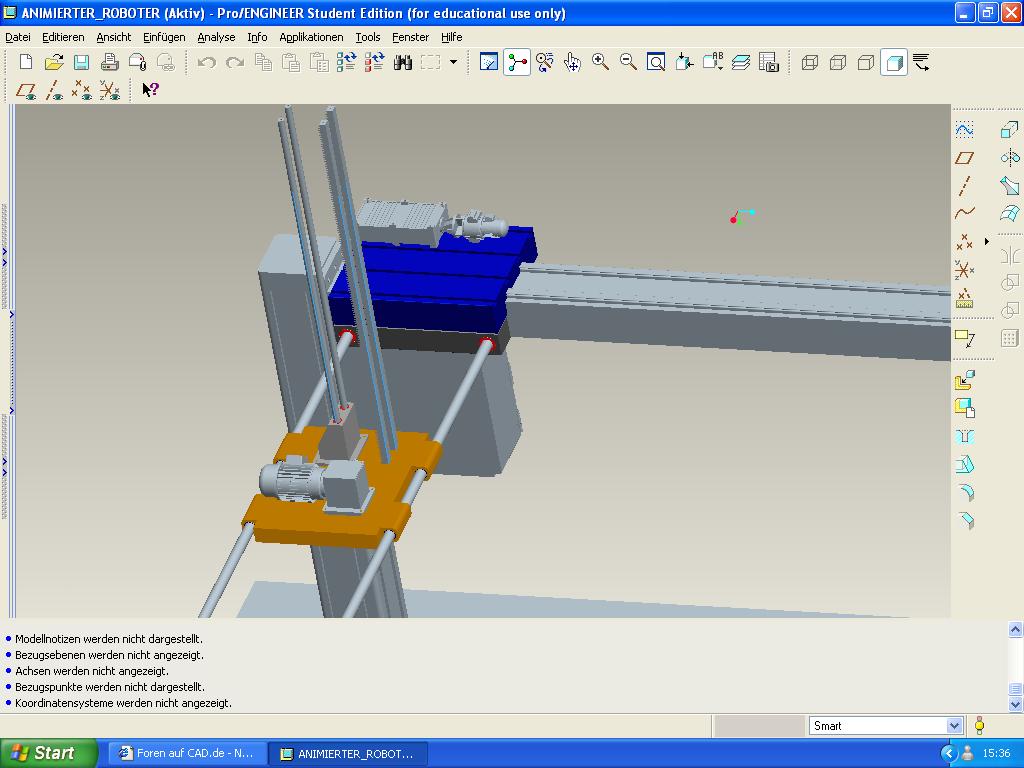
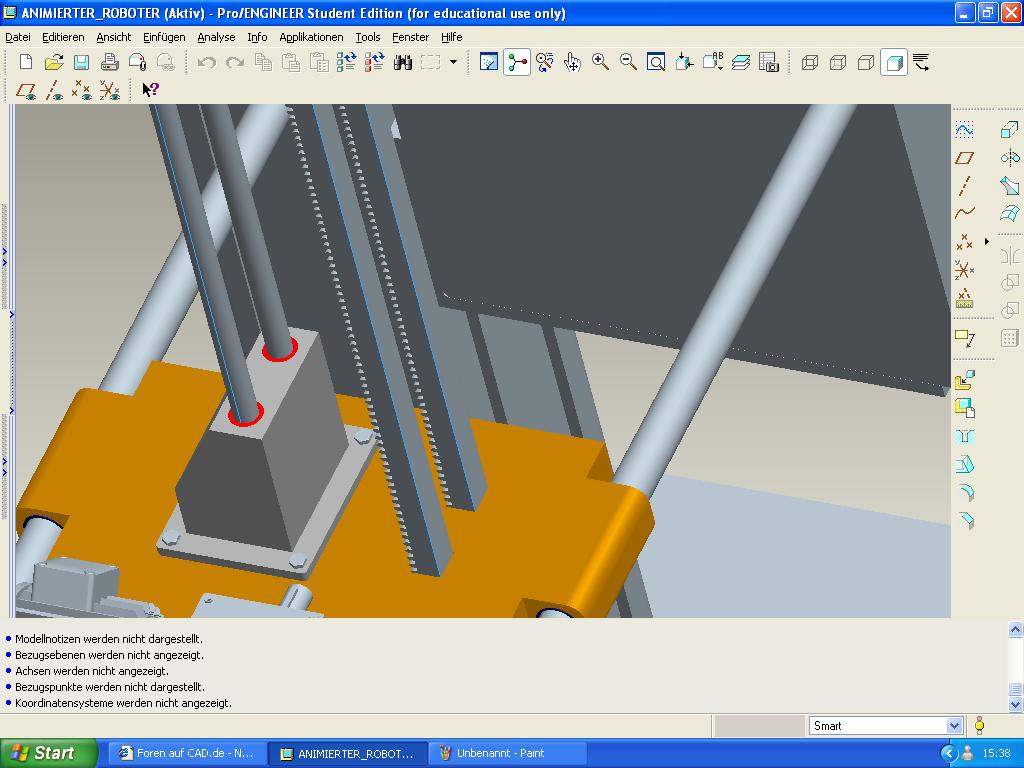
hey Leute Ich habe ein Mechanismus Problem. Und zwar arbeite ich gerade an einem Portalroboter und versuche die Hubbeweggung zu animieren. Für die beiden Zahnstangen und die beiden ( ich nenn sie jetz einfach mal Hubwellen), verwende ich schubgelenke. Ich habe auch im Mechanismus unter Führungen bereits die Leitkurve, die ich durch eine Skizze erstellt habe, definiert. Auch Start und Endpunkt stehen fest. Jedoch habe ich große Probleme beim definieren des Kopplungspunktes, mir ist einfach nciht klar wo ich den plazieren kann beziehungsweise darf. Bei den beiden Wellen zum Beispiel liegen die Kopplungspunkte dort wo sich Welle und Buchse treffen. Wenn ich versuche das ganze ablaufen zu lassen, funktioniert es zwar, jedoch nur eine gewisse zeit. Nach ungefähr der Hälfte der Zeit sagt er mir das der Mechanismus nicht zusammengebaut werden konnnte. Kann mir jemand bezüglich dieses Kopplungspunktes einen Ratschlag geben? dankee 
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
UJung
Mitglied
Dipl.-Ing.
Beiträge: 73
Registriert: 06.06.2005 WF4 M220
WC 10.0 M030
i5 , 8GB RAM, W7
|
erstellt am: 16. Apr. 2007 14:22 <-- editieren / zitieren --> Unities abgeben: Nur für ProEler01 
Hallo, zwei Ansätze:
1) Ein Schubgelenk ist eine Kombination aus Zylinderlager und planarem Lager. Vielleicht hilft es, das Schubgelenk in diese zwei einzelnen Verbindungen aufzulösen. 2) Ist vielleicht der Mechanismus überbestimmt? Mit zwei (parallelen) Zylinderlagern ist er es im Prinzip schon. Vielleicht hilft es, nur die unbedingt nötigen Verbindungen zu verwenden. Lässt sich der Mechanismus von Hand so weit verschieben, wie es später der Antrieb machen soll? Uwe Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ProEler01
Mitglied
Beiträge: 13
Registriert: 04.04.2007
|
erstellt am: 19. Apr. 2007 23:03 <-- editieren / zitieren --> Unities abgeben:
Hey Uwe Ja der Mechanismus ließ sich verschieben, hab das Problem aber inzwischen gelöst. Ich hatte Leitkurven verwendet, die ich anscheinend bei einen Schubgelenk das einfach eine translatorische geradlinige bewegung ausführt, nichgt tun muss oder Soll. Als ich diese wegggelassen habe also die (Führungen gelöscht hatte) ging es. schöne Grüße Proeler Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
| Anzeige.:
Anzeige: (Infos zum Werbeplatz >>)
 |

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|