| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für Autodesk Produkte |
| | |
 | PDM: Unser Schritt in Richtung Digitalisierung zahlt sich jetzt bereits mehrfach aus. (GAIN Collaboration,PDM,PDM System,PLM,PLM System) |
|
Autor
|
Thema: Dynamische Simulation - 3D Kontakt (2661 mal gelesen)
|
Manta-Hai
Mitglied

   Beiträge: 52
Registriert: 06.05.2009 Inventor Pro 2015
Lenovo W530
|

 erstellt am: 26. Sep. 2014 11:22
erstellt am: 26. Sep. 2014 11:22  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
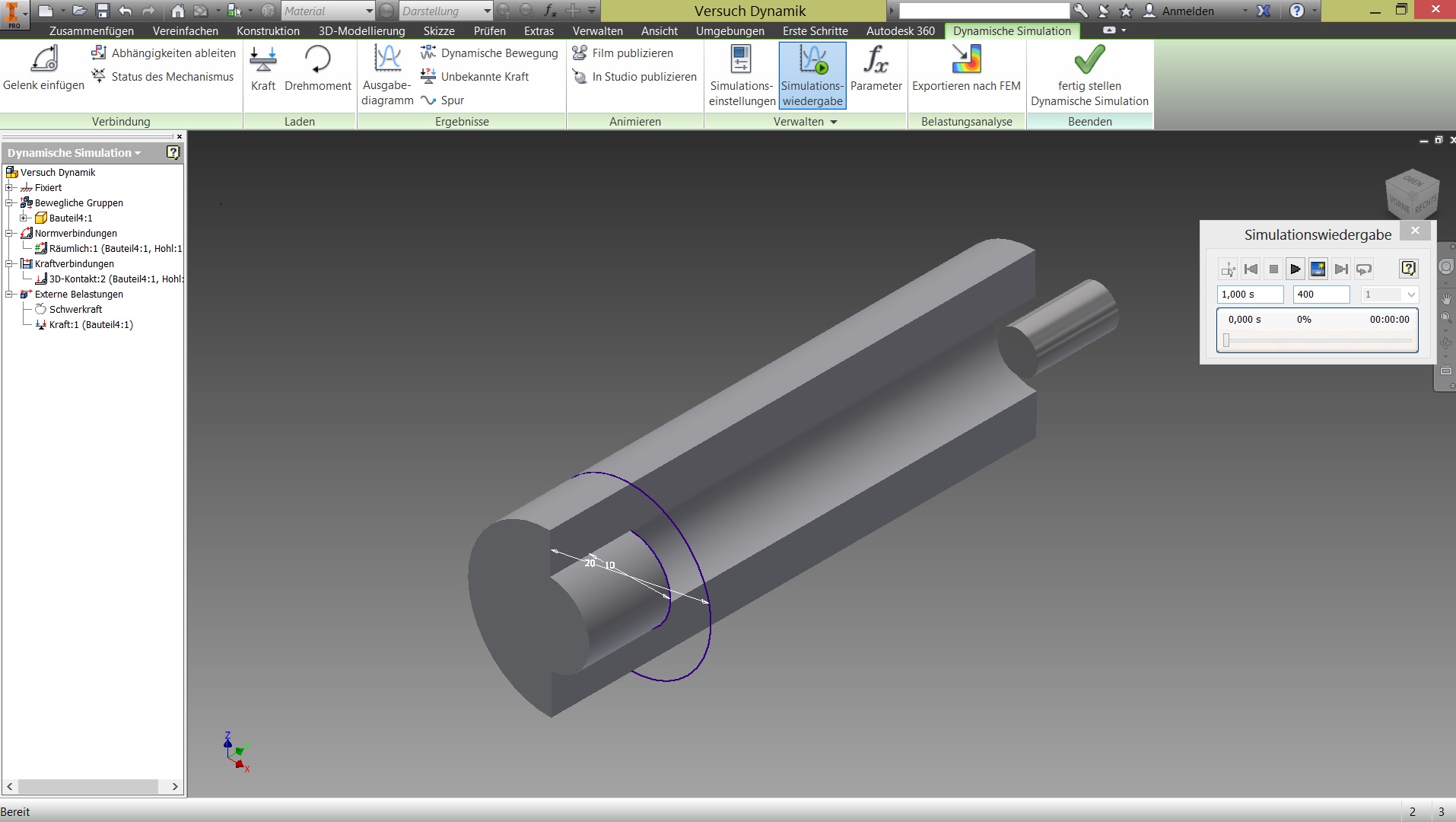
Hallo, ich habe eine Frage zur Dynamischen Simulation im speziellen zum 3D-Kontakt. Das angehängte Bild zeigt um was es geht: Der kleine Stift soll bis zum Boden des großen Körpers bewegt werden und sobald sich die beiden berühren stoppen. Mit den 3D-Kontakt Standardeinstellungen klappt es, aber nur wenn ich mit aktivierter Schwerkraft und ohne eine zusätzliche Kraft arbeite. Mit einer zusätzlichen Kraft funktioniert es nicht mehr, der Stift rauscht durch den großen Körper... Woran liegt es, irgendwelche Tips? [Diese Nachricht wurde von Manta-Hai am 26. Sep. 2014 editiert.] [Diese Nachricht wurde von Manta-Hai am 26. Sep. 2014 editiert.] [Diese Nachricht wurde von Manta-Hai am 26. Sep. 2014 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jupa
Ehrenmitglied V.I.P. h.c.
Ruheständler
Beiträge: 6051
Registriert: 16.09.2004 Inventor Prof. bis 2022
|
erstellt am: 26. Sep. 2014 12:23 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai 
Baugruppe ohne zugehörige Bauteile? Und Angabe der verwendeten Inventor-Version in der System-Info wäre hilfreich. Jürgen ------------------
Bildung kommt nicht vom Lesen, sondern vom Nachdenken über das Gelesene. (Carl Hilty) [Diese Nachricht wurde von jupa am 26. Sep. 2014 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Manta-Hai
Mitglied
Beiträge: 52
Registriert: 06.05.2009 Inventor Pro 2015
Lenovo W530
|
 erstellt am: 26. Sep. 2014 17:43 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 26. Sep. 2014 17:43 <-- editieren / zitieren --> Unities abgeben:
|
jupa
Ehrenmitglied V.I.P. h.c.
Ruheständler
Beiträge: 6051
Registriert: 16.09.2004 Inventor Prof. bis 2022
|
erstellt am: 26. Sep. 2014 20:05 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai
Hallo, bei einem ersten kurzen Blick habe ich gesehen, daß Dein 3D-Kontakt mit einer Steifigkeit = 0 definiert ist, d.h. daß nichts da ist, was sich einem gegenseitigen Durchdringen der Bauteile in den Weg stellt.
Außerdem bezweifle ich, daß Deine Werte für Steifigkeit, Dämpfung und Reibung den Standardwerten entsprechen (bei mir 1000, 1 und 0).
Kann mich aber erst am Sonntag wieder näher damit beschäftigen ... Jürgen ------------------
Bildung kommt nicht vom Lesen, sondern vom Nachdenken über das Gelesene. (Carl Hilty) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jupa
Ehrenmitglied V.I.P. h.c.
Ruheständler
Beiträge: 6051
Registriert: 16.09.2004 Inventor Prof. bis 2022
|
erstellt am: 27. Sep. 2014 19:06 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai
Ok, bin wieder da. Habe die Eigenschaften des 3D-Kontaktes etwas günstiger gewählt (Steifigkeit 5000, Dämpfung 0,01, Reibung 0) und außerdem - ganz wichtig - die Anzahl der Berechnungsschritte deutlich erhöht (von 400 auf 10000) - und schon klappt's auch mit Schwerkraft + zusätzlicher Kraft. Bei zu geringer Schrittanzahl für die Berechnung kann es nämlich passieren, daß sich das bewegte Teil bei einem Berechnungsschritt noch zu weit vom zweiten Teil entfernt befindet, beim nächsten Schritt aber schon zu weit eingetaucht ist und somit der Kontaktzeitpunkt gewissermaßen "verpaßt" wird - dann rauscht es gnadenlos durch.
(Angehängtes Beispiel in IV 2015 gespeichert) Have fun
Jürgen ------------------
Bildung kommt nicht vom Lesen, sondern vom Nachdenken über das Gelesene. (Carl Hilty) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Manta-Hai
Mitglied
Beiträge: 52
Registriert: 06.05.2009 Inventor Pro 2015
Lenovo W530
|
 erstellt am: 27. Sep. 2014 21:00 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 27. Sep. 2014 21:00 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von jupa:
Ok, bin wieder da.Habe die Eigenschaften des 3D-Kontaktes etwas günstiger gewählt (Steifigkeit 5000, Dämpfung 0,01, Reibung 0) und außerdem - ganz wichtig - die Anzahl der Berechnungsschritte deutlich erhöht (von 400 auf 10000) - und schon klappt's auch mit Schwerkraft + zusätzlicher Kraft. Bei zu geringer Schrittanzahl für die Berechnung kann es nämlich passieren, daß sich das bewegte Teil bei einem Berechnungsschritt noch zu weit vom zweiten Teil entfernt befindet, beim nächsten Schritt aber schon zu weit eingetaucht ist und somit der Kontaktzeitpunkt gewissermaßen "verpaßt" wird - dann rauscht es gnadenlos durch.
(Angehängtes Beispiel in IV 2015 gespeichert) Have fun
Jürgen
Sau gut  , vielen Dank! Aber wie weiß ich welche Steifigkeit ich nehmen muss (sollte ja eigentlich von den Materialen abhängig sein). , vielen Dank! Aber wie weiß ich welche Steifigkeit ich nehmen muss (sollte ja eigentlich von den Materialen abhängig sein). Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
jupa
Ehrenmitglied V.I.P. h.c.
Ruheständler
Beiträge: 6051
Registriert: 16.09.2004 Inventor Prof. bis 2022
|
erstellt am: 28. Sep. 2014 10:07 <-- editieren / zitieren --> Unities abgeben: Nur für Manta-Hai
Zitat:
Original erstellt von Manta-Hai:
wie weiß ich welche Steifigkeit ich nehmen muss
Gute Frage! Nächste Frage bitte ...  Nee, im Ernst, genau diese Frage (verallgemeinert: woher nehme ich die Werte für die Eingangsgrößen Gelenkeigenschaften) stelle ich mir auch seit langem und habe sie auch schon mal hier im Forum angesprochen - leider ohne Resultat.
Ich denke, da bleibt einem nicht viel mehr, als mit Erfahrungswerten zu arbeiten. Schlimmstenfalls selbst Testreihen mit verschiedenen Materialpaarungen fahren(?). Direkt aus den üblichen Materialeigenschaften sind sie IMHO") nicht abzuleiten. nicht abzuleiten.
Die in vielen Lehrbüchern gezeigte Methode - so lange an den Werten "rumfummeln" bis einem das Ergebnis gefällt - halte ich für völlig unsinnig. Ich will ja das Verhalten eines Mechanismus vorhersagen und nicht ein beobachtetes Verhalten "nachbauen". Aber vllt. hat einer der Gurus hier noch eine gute Idee ... Jürgen ------------------
Bildung kommt nicht vom Lesen, sondern vom Nachdenken über das Gelesene. (Carl Hilty) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|