Hallo alle miteinander
Ich habe folgende Aufgabe und wehre dankbar für ein paar konstruktive Vorschläge.
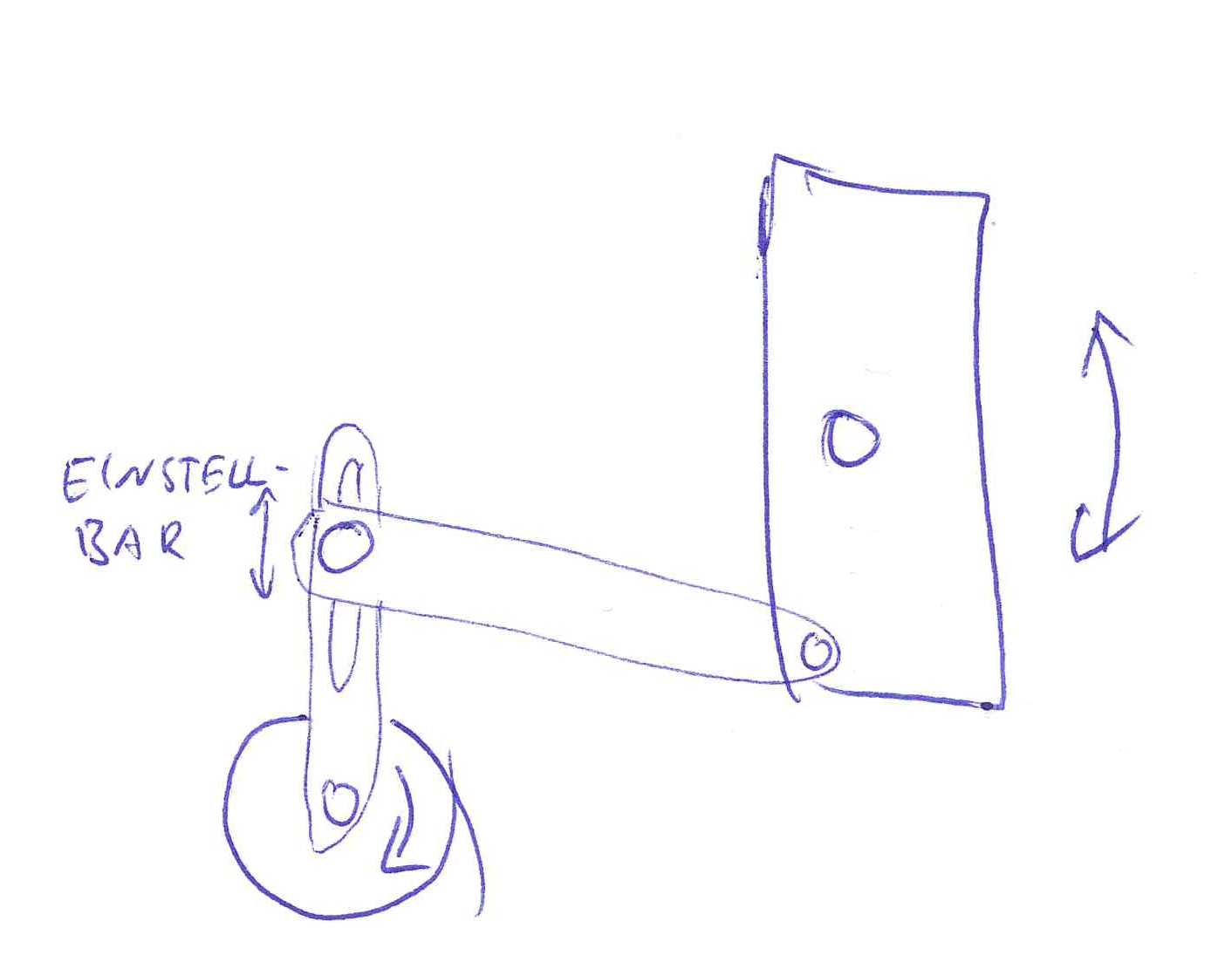
Ich soll ein Objekt (ca. 4 kg) entsprechend im Schwerpunkt lagern und mittels Aktuator ständig um ein paar grad (ca. 10 grad) vor und zurück bewegen. Ich möchte also die Winkelbewegung kontrollieren können, weil der Winkel abhängig von der Situation variieren kann. Die Lagerung im Schwerpunkt ist deswegen damit ich keinen Drehmoment bewältigen muss sondern halt nur das Trägheitsmoment. Die Schwingbewegung soll ca. 3 Hz betragen. All das soll ziemlich langlebig sein. Die Üblichen verdächtigen, die mir so einfallen sind: Schrittmotor, Servomotor, Linearmotor. Mich würde interessieren, welcher Aktuator für mein Problem die besten Eigenschaften hat, was die Belastungen angeht und die Langlebigkeit. Also es besteht ständige Beschleunigung und Abbremsung, wobei die bewegte Masse eigentlich nicht groß ist. Was die Übersetzung angeht, habe ich die freihielt es optimal zu gestalten falls erforderlich (1:1). Wie schon gesagt würde mich freuen über konstruktive Vorschläge.
------------------
Nothing eases pain like a human touch (Fischer)
[Diese Nachricht wurde von Grandmaster am 23. Jun. 2013 editiert.]
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de