| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für Creo |
| | |
 | BOM Assistant für Stücklistenerstellung , eine App
|
|
Autor
|
Thema: Einbauproblem Koordinatensysteme (2400 mal gelesen)
|
stefanglass
Mitglied
Konstrukteur

   Beiträge: 440
Registriert: 04.04.2003 Creo2 (M100)
SUT 2013
|

 erstellt am: 29. Jun. 2005 12:53
erstellt am: 29. Jun. 2005 12:53  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo, ich habe wie schon oben genannt ein Einbauproblem.
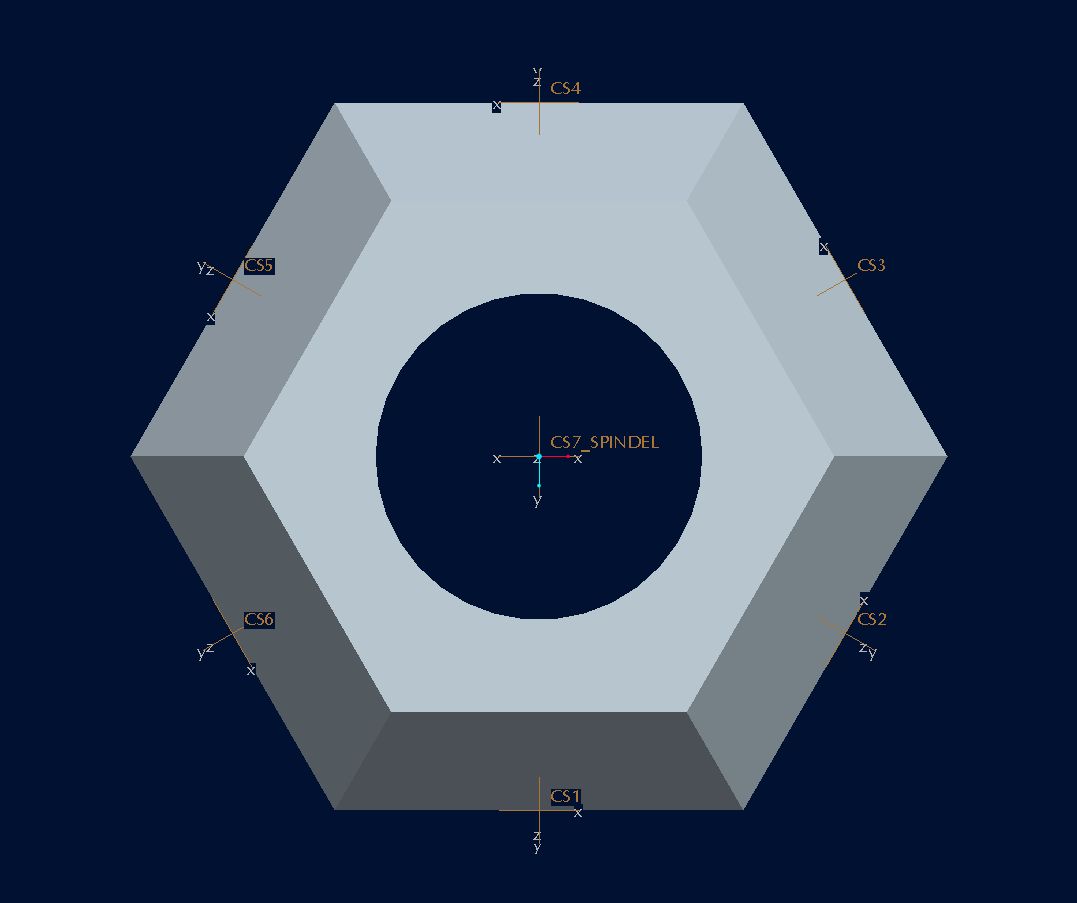
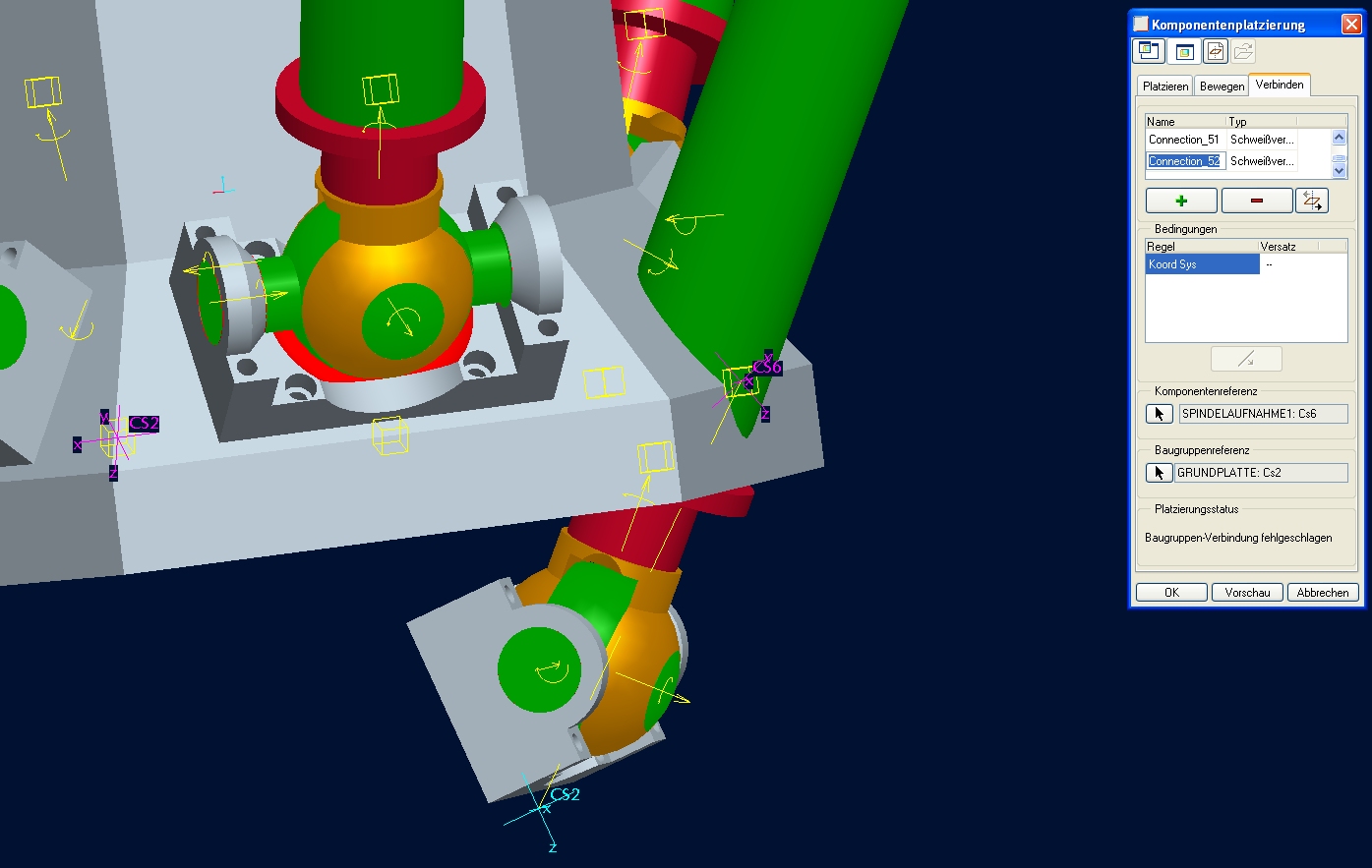
Im ersten Bild ist eine Spindelaufnahme zu sehen. Diese hat an den Seitenflächen 6 Koordinatensysteme zum Einbau von Gelenken.
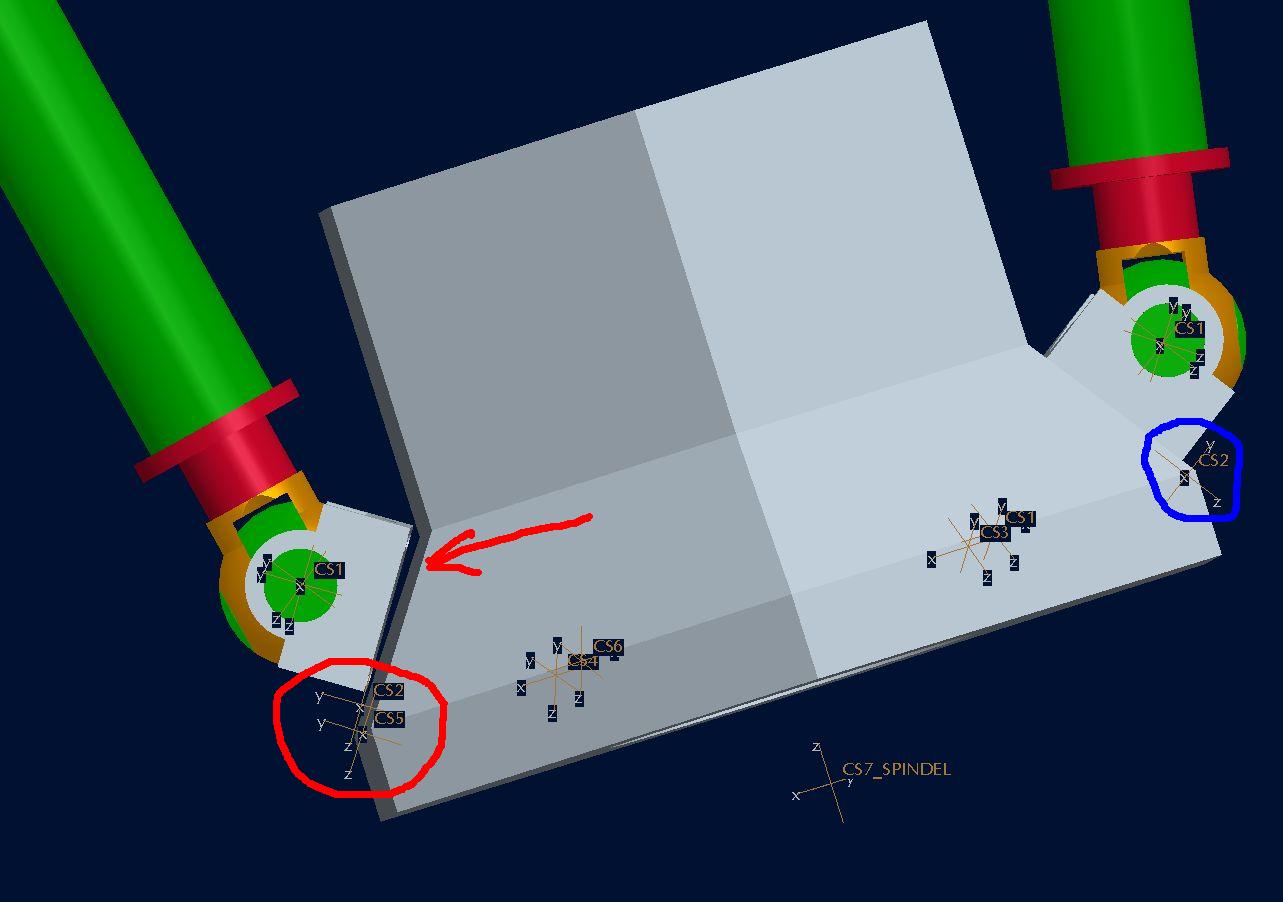
Im zweiten Bild sieht man die Einbaulage. Das rechte Gelenk ist richtig auf dem Koordinatensystem plaziert (blauer Kreis).
Ich möchte zusätzlich eine zweite Einbaubedingung definieren, indem das zweite Gelenk auch auf dem Koordinatensystem der Spindelaufnahme sitzt (roter Kreis). Dabei kommt es leider zum Versatz (Pfeil).
Ich habe schon ein wenig rum probiert und versucht, mittels Connections eine starre Verbindung zu definieren. Da kann ich aber nur ein Koordinatensystem angeben. Bei dem zweiten meckert er dann rum.
Ziel ist es, mittels Simulation eine definierte Bewegung der Spindel zu realisieren. Kann mir dabei irgendwer helfen? Gruß Stefan
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
stefanglass
Mitglied
Konstrukteur
Beiträge: 440
Registriert: 04.04.2003 Creo2 (M100)
SUT 2013
|
erstellt am: 29. Jun. 2005 12:55 <-- editieren / zitieren --> Unities abgeben:
|
rjordan
Mitglied
ProE-Admin, Konstrukteur
Beiträge: 1428
Registriert: 17.03.2003 Creo 3
Win 10 Pro 64bit
Intel Xeon 3,7 GHz
Nvidia Quadro P4000
|
erstellt am: 29. Jun. 2005 14:30 <-- editieren / zitieren --> Unities abgeben: Nur für stefanglass 
Hallo Stefan, verstehe es richtig ? Du baust das Gelenkteil mit 2 Einbaubedingungen ein ?
Wenn Du über Koordinatensystem einbaust, ist das Teil eindeutig bestimmt. Dann baust es ein zweites Mal ein und nimmst das gegenüberliegende Koordinatensystem. ------------------
Scheinbare Rechtschreibfehler beruhen auf eine individuelle Rechtschreibreform Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
stefanglass
Mitglied
Konstrukteur
Beiträge: 440
Registriert: 04.04.2003 Creo2 (M100)
SUT 2013
|
erstellt am: 29. Jun. 2005 14:56 <-- editieren / zitieren --> Unities abgeben:
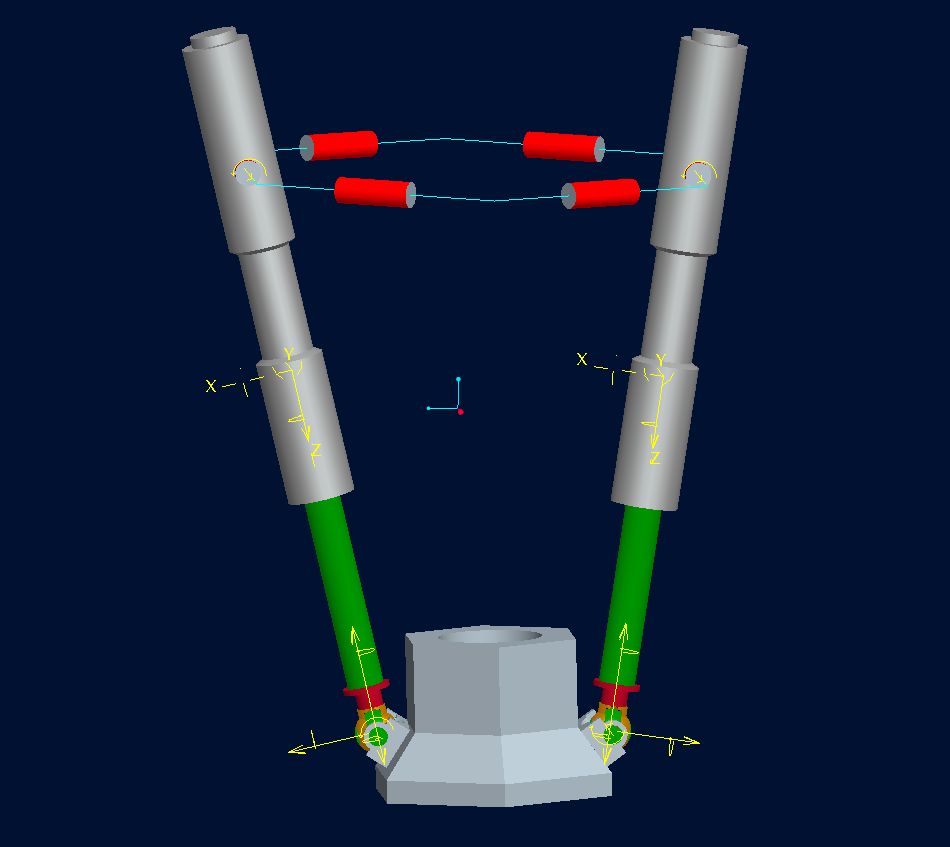
genau, ich baue die Spindelaufnahme mit zwei Bedingungen ein. Das funktioniert ja auch, nur positioniert er das zweite Gelenk nicht so , wie ich es möchte (es ist dann in der beliebigen Position fest). Ich habe zum besseren Verständnis noch einmal ein Bild als Gesamtansicht angehängt. Da erkennt man, daß ich die übrigen Einbaubedingungen mittels Connections realisiert habe. Ich möchte ja nur, das ProE mir die Gelenke dann mit den zwei Einbaubedingungen an die richtige Stelle setzt. Vielleicht setzte ich aber auch zuviel Intelligenz voraus? Gruß Stefan Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
rjordan
Mitglied
ProE-Admin, Konstrukteur
Beiträge: 1428
Registriert: 17.03.2003 Creo 3
Win 10 Pro 64bit
Intel Xeon 3,7 GHz
Nvidia Quadro P4000
|
erstellt am: 29. Jun. 2005 15:58 <-- editieren / zitieren --> Unities abgeben: Nur für stefanglass
Zitat:
Original erstellt von stefanglass:
genau, ich baue die Spindelaufnahme mit zwei Bedingungen ein.
Du baust doch nicht mit 2 Bedingungen ein, sondern das ganze Teil wird zweimal eingebaut.
Da die Koordinatensystem gleich orientiert sind, sehe ich anhand der Bilder kein Grund, warum es nicht funktioniert.
Vielleicht kannst du mal die Aufnahme und das Gelenk hier einstellen. ------------------
Scheinbare Rechtschreibfehler beruhen auf eine individuelle Rechtschreibreform Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 29. Jun. 2005 15:58 <-- editieren / zitieren -->
das geht glaube ich so nicht. Wenn das ganze beweglich blieben soll, darf das Gelenkteil nur auf ein Koordinatensystem eingebaut werden (Schweißverbindung). Alle weiteren Gelenke müssten über Achsen oder Punkte verbunden werden. Noch eine Frage zum Verständnis: Welches Teil wird zuerst einebaut bzw. hat die wenigsten Freiheitsgrade. ------------------
Gruß aus dem Norden |
rjordan
Mitglied
ProE-Admin, Konstrukteur
Beiträge: 1428
Registriert: 17.03.2003 Creo 3
Win 10 Pro 64bit
Intel Xeon 3,7 GHz
Nvidia Quadro P4000
|
erstellt am: 29. Jun. 2005 16:07 <-- editieren / zitieren --> Unities abgeben: Nur für stefanglass
Zitat:
Original erstellt von Peddersen:
das geht glaube ich so nicht.
Wenn das ganze beweglich blieben soll, darf das Gelenkteil nur auf ein Koordinatensystem eingebaut werden (Schweißverbindung). Alle weiteren Gelenke müssten über Achsen oder Punkte verbunden werden.
Ich denke mal, daß die Gelenke fest mit Spindelaufnahme verbunden sein sollen. Das geht schon. ------------------
Scheinbare Rechtschreibfehler beruhen auf eine individuelle Rechtschreibreform Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
stefanglass
Mitglied
Konstrukteur
Beiträge: 440
Registriert: 04.04.2003 Creo2 (M100)
SUT 2013
|
erstellt am: 29. Jun. 2005 16:15 <-- editieren / zitieren --> Unities abgeben:
anbei die Dateien zu dem Ganzen. Das erste Teil in der Baugruppe ist die Kurve mit den Zylindern (rote Mantelfläche), welches die Streben aufnimmt. Danach werden die Streben und Gelenke eingebaut (über Drehgelenke). Zum Schluß will ich die Gelenke mit der Spindelaufnahme verbinden. Gruß Stefan
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
rjordan
Mitglied
ProE-Admin, Konstrukteur
Beiträge: 1428
Registriert: 17.03.2003 Creo 3
Win 10 Pro 64bit
Intel Xeon 3,7 GHz
Nvidia Quadro P4000
|
erstellt am: 30. Jun. 2005 07:33 <-- editieren / zitieren --> Unities abgeben: Nur für stefanglass
Moin Stefan, ich würde dir empfehlen, den Lagerbock fürs Gelenk nicht in Baugruppe GLAE_F-232220 einzubauen, sondern erst die Spindelaufnahme mit den Böcken und dann erst mit den Schubstangen montieren. ------------------
Scheinbare Rechtschreibfehler beruhen auf eine individuelle Rechtschreibreform Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
stefanglass
Mitglied
Konstrukteur
Beiträge: 440
Registriert: 04.04.2003 Creo2 (M100)
SUT 2013
|
erstellt am: 30. Jun. 2005 10:33 <-- editieren / zitieren --> Unities abgeben:
Moin, also ich habe jetzt mal die Einbaureihenfolge verändert.
Leider bringt das auch nicht den gewünschten Erfolg (eine Einbaubedingung akzeptiert er, bei der zweiten meckert er dann rum).
Hat noch jemand einen anderen Vorschlag?
Wie gesagt, vielleicht setzte ich ja auch einfach zuviel Intelligenz voraus? Gruß Stefan Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 30. Jun. 2005 13:13 <-- editieren / zitieren -->
@rjordan: Widerspruch!!! Einbau in ein Koordinatensystem geht definitif nur 1mal! Umwandeln in Schweißverbindung führt dazu, das anhängende Elemente der Baugruppe ihre Freiheitsgrade behalten. Ich habe leider im Moment keine Zeit mir die Baugruppe im einzelnen anzusehen. Prinzipiell folgendes beachten: -Strebaufnahme als 1.Teil o.k. -Gelenkrohr 1 einbauen -Verbindungen bzw. Freiheitgrade innerhalb dieser Baugruppe genau festlegen (nicht allgemein verwenden) -Spindelaufnahme an 1.Gelenkrohr koords.-umwandeln in Schweißverbindung -Gelenkrohr 2 einbauen koords.-umwandeln in Schweißverbindung -Bohrung von Gelenkrohr mit Aufnahme Verbinden. Geht wenn die Freiheitgrade richtig festgelegt sind -weiter mit den anderen Gelenkrohren ------------------
Gruß aus dem Norden |
stefanglass
Mitglied
Konstrukteur
Beiträge: 440
Registriert: 04.04.2003 Creo2 (M100)
SUT 2013
|
erstellt am: 30. Jun. 2005 14:14 <-- editieren / zitieren --> Unities abgeben:
... so ich habe jetzt die Verbindung von Strebe und Tauchrohr in eine Schubverbindung umgewandelt. Wenn ich mich an die oben genannte Einbauweise halte, kommt die selbe Fehlermeldung. Alternativ mit meiner Variante aber auch. Gruß Stefan Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
rjordan
Mitglied
ProE-Admin, Konstrukteur
Beiträge: 1428
Registriert: 17.03.2003 Creo 3
Win 10 Pro 64bit
Intel Xeon 3,7 GHz
Nvidia Quadro P4000
|
erstellt am: 30. Jun. 2005 16:10 <-- editieren / zitieren --> Unities abgeben: Nur für stefanglass
Hallo Stefan, ich hab's !!! Du hast zu viele drehbare Gelenke in den Schubstangen. Zwischen der Strebe und Tauchrohr habe ich ein Schubgelenk definiert. Oder du verbietest die Drehbarkeit.
Außerdem zwischen Kugel und Drillachse oder Drillachse und Tauchrohr muß eine feste Verbindung definiert sein. Dann kann man auch die Aufnahme an die 2 KS der Gelenkböcke anschweissen.
Voala, dann funktionierst ! ------------------
Scheinbare Rechtschreibfehler beruhen auf eine individuelle Rechtschreibreform [Diese Nachricht wurde von rjordan am 30. Jun. 2005 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
stefanglass
Mitglied
Konstrukteur
Beiträge: 440
Registriert: 04.04.2003 Creo2 (M100)
SUT 2013
|
erstellt am: 30. Jun. 2005 16:27 <-- editieren / zitieren --> Unities abgeben:
Hmm... da sag ich erstmal danke, auch wenn es bei mir nicht so wie bei Dir hingehauen hat. Schubgelenk habe ich definiert (in der Strebe). Gelenk und Strebe (besser Tauchrohr) habe ich über eine strarre Verbindung eingebaut??? Kanns Du mir vielleicht Deine/meine Baugruppe einstellen? Gruß Stefan Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
rjordan
Mitglied
ProE-Admin, Konstrukteur
Beiträge: 1428
Registriert: 17.03.2003 Creo 3
Win 10 Pro 64bit
Intel Xeon 3,7 GHz
Nvidia Quadro P4000
|
erstellt am: 01. Jul. 2005 08:45 <-- editieren / zitieren --> Unities abgeben: Nur für stefanglass
Hallo Stefan, den Upload scheint unsere Firewall zu unterbinden. Schicke mir ne Mail, damit ich dir die geänderten ASMs zusenden kann. ------------------
Scheinbare Rechtschreibfehler beruhen auf eine individuelle Rechtschreibreform Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
stefanglass
Mitglied
Konstrukteur
Beiträge: 440
Registriert: 04.04.2003 Creo2 (M100)
SUT 2013
|
erstellt am: 01. Jul. 2005 16:30 <-- editieren / zitieren --> Unities abgeben:
Hallo, hier noch einmal die Vorgehensweise zum Lösen des Problems:
- die Gelenkverbindungen müssen eindeutig definiert sein (Allgemein vermeiden)
- Einbau über mehrere Koordinatensysteme erfolgt über eine Schweissverbindung
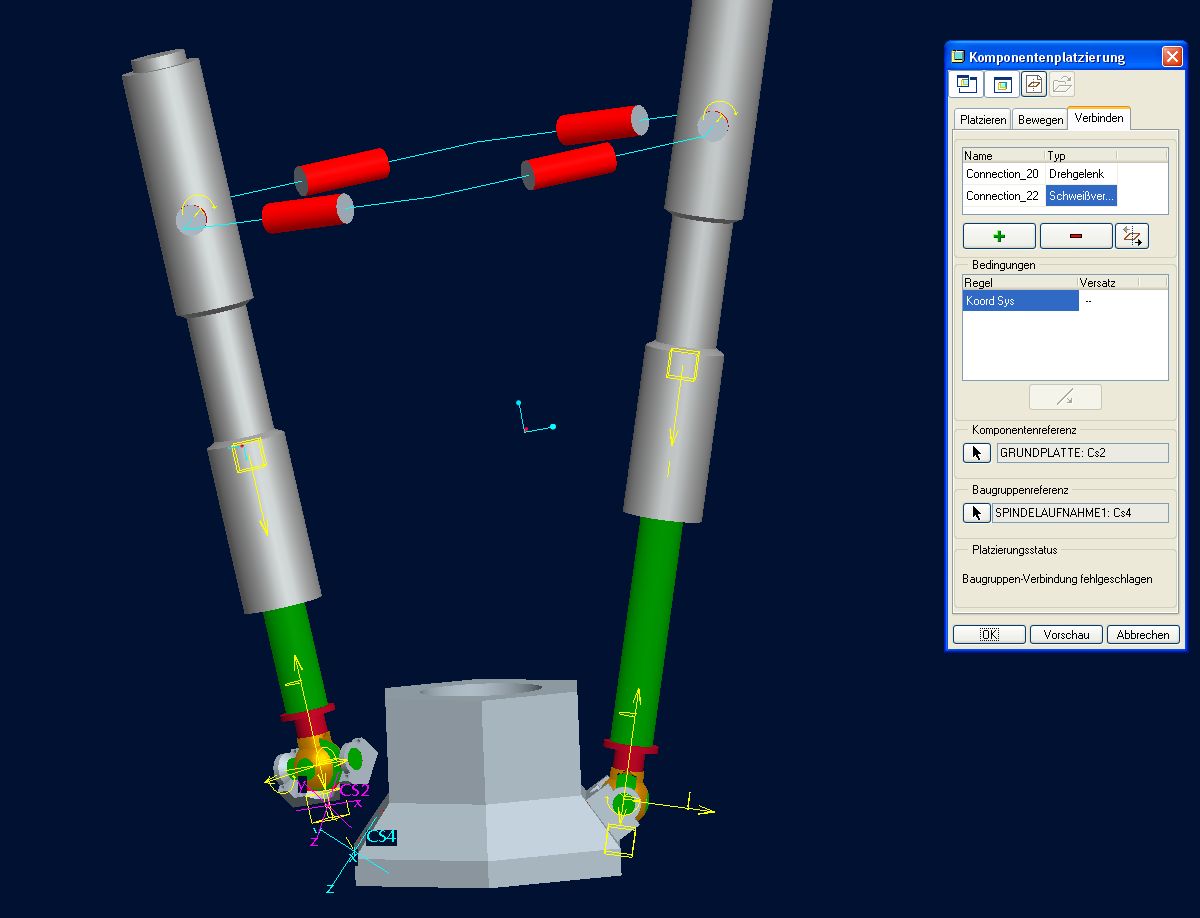
- die Fehlermeldung ignorieren bzw. Einbau bestätigen (siehe Screen1)
- im Mechanismus erfolgt dann beim Ziehen des Körpers die richtige Einbauposition (siehe Screen2) Mein Dank geht an rjordan, der mich tatkräftig dabei unterstützt hat! Gruß Stefan Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|