>>Welche Bewegungen die Arme des Roboters dabei machen, soll NX selbst entscheiden, ich möchte nur ein Maß in einer Richtung vorgeben.
Computer sind stur und dumm. Sie tun genau das, was ihnen der Anwender sagt.
"Selbst entscheiden" ist nicht drin.
Aber Dein Beispiel ist ein relativ einfaches geometrisches Problem.
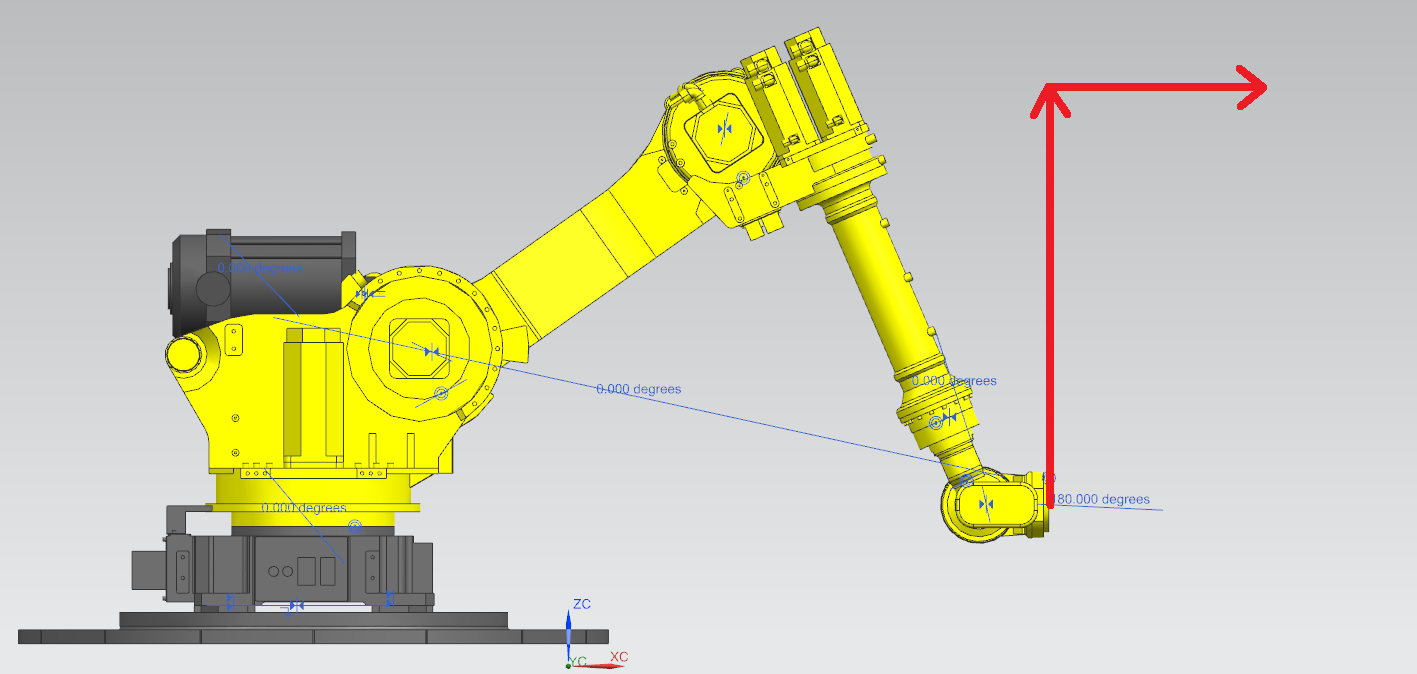
Du hast zwar 3 Gelenke, aber die vertikale Bewegung betrifft nur die beiden langen Hebel.
Der kurze Hebel muss lediglich in der Horizontalen gehalten werden.
Also ergibt sich ein Dreieck, dessen linker Punkt fixiert ist, während der rechte Punkt eine Bewegung in der Z-Achse vollzieht.
(Der horizontale Abstand zwischen dem linken und dem rechten Gelenk ist konstant.)
Nimm t = 0 ... 100 als Zeitschritte.
Nimm dZ als 1/100 der vertikalen Strecke.
Nun kannst Du für jeden Zeitschritt die erforderlichen Winkel bestimmen.
Das müsste sich doch lösen lassen...
------------------
Rainer Schulze
[Diese Nachricht wurde von Rainer Schulze am 15. Feb. 2016 editiert.]
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|