>> Ich möchte nun das die äußere Welle die axiale Bewegung der inneren mitmacht, die rotatorische aber nicht. Dazu wollte ich die äußere Welle mit der innen über ein "revolute" Joint verbinden. Da ich dachte, dass dieser die rotatorische Bewegung der innenliegenden Welle zulässt, die translatorische aber nicht.
>>A revolute joint connects two links, allowing one rotational degree of freedom about the Z-axis. A revolute joint does not allow translational movement in any direction between the two links. You can assign a motion driver to a revolute joint.
>>Da ich dachte...
Im ersten Ansatz also schon mal richtig gedacht.
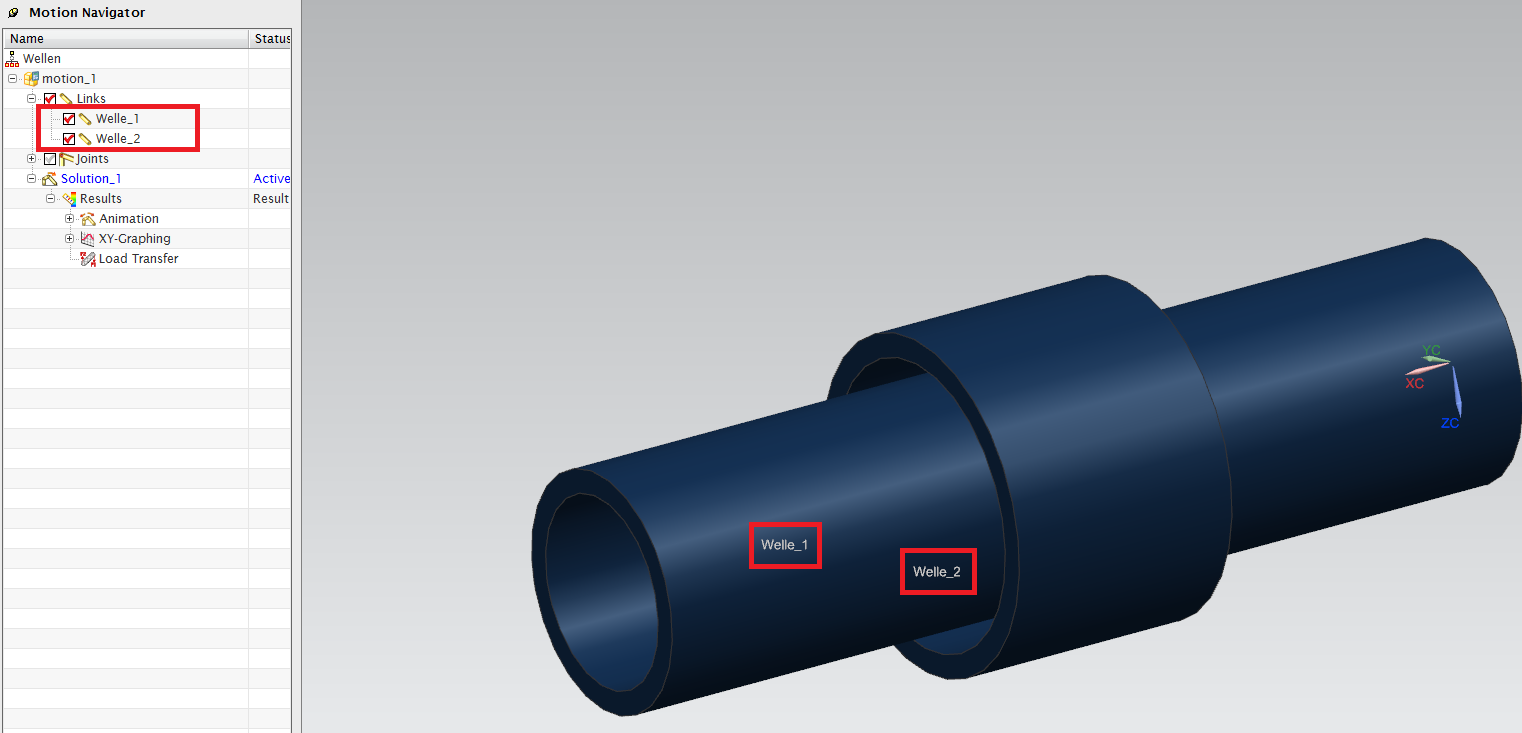
Aus dem Bild kann man nicht erkennen, warum die äussere Welle sich ebenfalls dreht.
Und umgekehrt - was soll die Welle von einer Rotation abhalten?
Aber bedenke bitte, dass mindestens 1 Element der Anordnung fixiert sein muss, damit die Simulation korrekt durchgeführt wird.
Wie hast Du denn den Antrieb von Joint1 "verankert"?
Gegen was arbeitet dieser Antrieb?
>>PS: Als Lösung könnte man jetzt ...
Um Himmels Willen!
Da würde ich eher die äussere Welle mit einem Schiebegelenk gegen "Erde" fixieren.
>>Ein Schiebegelenk verknüpft zwei Verbindungen, und lässt ein translationales Freiheitsgrad zwischen den Verbindungen zu. Schiebegelenke lassen keine rotationale Bewegung zwischen zwei Verbindungen zu. Einem Schiebegelenk kann ein Kinematiktreiber zugewiesen werden.
------------------
Rainer Schulze
>>Aus dem Bild kann man nicht erkennen, warum die äussere Welle sich ebenfalls dreht.
Hast Du eventuell bei der Einrichtung des Gelenks Reibung aktiviert?
[Diese Nachricht wurde von Rainer Schulze am 14. Okt. 2014 editiert.]
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|