| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für PTC CREO |
| | |
 | Effiziente Migration nach PTC Windchill: Software Factory stellt Migration Factory für komplexe Transformationsprojekte vor, eine Pressemitteilung
|
|
Autor
|
Thema: Step Dateien beweglich machen (3277 / mal gelesen)
|
lausbub1504
Mitglied
Student
   Beiträge: 9
Registriert: 20.01.2016 Schnöder Laptop mit I3 Prozessor, Nvidia Geforce Cuda, 500Gb SSD und 16Gb Ram..
Win 7 64bit
|

 erstellt am: 20. Jan. 2016 15:44
erstellt am: 20. Jan. 2016 15:44  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo zusammen, im Rahmen meiner Bachelorarbeit muss/darf ich ein bisschen mit Creo spielen.. Leider hab ich mit Creo Parametric noch nicht soo viel gearbeitet.. (anderes Programm geht nicht, weil keine Lizenz =P) Zu meinem Problem: Ich möchte mittels Simulink einen Industrieroboter energetisch simulieren, dazu brauch ich ein komplettes "funktionsfähiges" Modell des Roboters..
Soweit so gut => Step Datei von der Herstellerhompage geholt, aus Creo exportiert und in Simulink importiert.
Leider kennt Simulink das Ding nicht wirklich, Simulink sieht alle Teile als verschweißt an =(
Daher kann ich so keine Bewegungen simulieren.. Hab den Roboter in "Einzelteile zerlegt und möchte ihn jetzt so neu zusammen bauen, dass alle Teile beweglich sind.
Ähnlich wie in diesem Video (https://www.youtube.com/watch?v=0zfcIFB3N70). In dem Video verbindet er die Teile mittels Drehgelenk (Achse vom Teil und Achse vom Hauptteil). Leider funktioniert das bei mir nicht. Muss ich hier irgendetwas gesondert beachten? Bin für jede Hilfe dankbar! Freundliche Grüße
lausbub ------------------
Wer fehler Findet darf sie behalten  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
lausbub1504
Mitglied
Student
Beiträge: 9
Registriert: 20.01.2016 Schnöder Laptop mit I3 Prozessor, Nvidia Geforce Cuda, 500Gb SSD und 16Gb Ram..
Win 7 64bit
|
erstellt am: 20. Jan. 2016 15:47 <-- editieren / zitieren --> Unities abgeben:
|
Rainer Schulze
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. im Ruhestand

Beiträge: 4419
Registriert: 24.09.2012
|
erstellt am: 20. Jan. 2016 16:04 <-- editieren / zitieren --> Unities abgeben: Nur für lausbub1504 
>>Wer fehler Findet darf sie behalten Ach, danke - davon habe ich schon genug. >> energetisch simulieren Was bitte soll man sich darunter vorstellen? >>verbindet er die Teile mittels Drehgelenk Also meinst Du eine kinematische Simulation (Bewegungsabläufe darstellen)? >>Leider kennt Simulink das Ding nicht wirklich,... Ist SimuLink nicht ohnehin nur der "Vermittler" zwischen Matlab und anderen Anwendungen?
Ist nicht so recht mein Fach, aber nach allem was ich so aufgeschnappt habe, musst Du in Matlab ebenso wie im CAD-Modell für jede Komponente eine geeignete Beschreibung anlegen.
Und bei der Vielfalt der Antriebe und Gelenke eines Roboters wirst Du da wohl keine Langeweile erleiden... >>Bin für jede Hilfe dankbar! Ich denke, in Deiner Beschreibung fehlt eine verständliche Aussage, an welcher Stelle Du nicht zurecht kommst. Einen umfassenden Trainingskurs für Kinematiksimulation wird Dir im Forum niemand geben.
------------------
Rainer Schulze Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
lausbub1504
Mitglied
Student
Beiträge: 9
Registriert: 20.01.2016 Schnöder Laptop mit I3 Prozessor, Nvidia Geforce Cuda, 500Gb SSD und 16Gb Ram..
Win 7 64bit
|
 erstellt am: 20. Jan. 2016 16:27 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 20. Jan. 2016 16:27 <-- editieren / zitieren --> Unities abgeben:
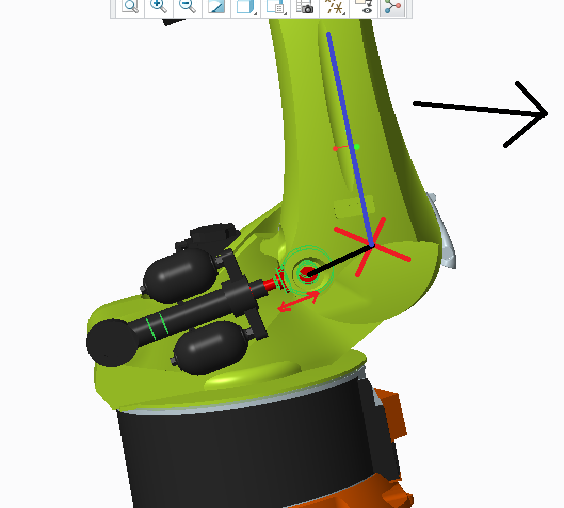
Ich will den energieverbrauch des Roboters virtuell simulieren Dazu nutze ich Simmechanics und SimPowerSystems. Das mit dem Drehgelenk hab ich jetzt kapiert, hatte nur n blöden Denkfehler drin.  Simulink ist Teil von Matlab/Simmechanics, die Beschreibung für die Komponenten in Matlab kann man gößtenteils aus den CAD Daten (wenn vernünftig gemacht) mittels Simmechanic Link übernehmen.. Kleinere Anpassungen müssen noch gemacht werden, aber die grobe Strucktur is schon mal da Ja das weis ich^^ Ich hab den Roboter jetzt soweit flexibel. Nur an einer Sache hänge ich noch fest: Der Roboterarm soll nach vorne kippen können (Pfeil).
Beim roten X hab ich ihn mitteld Drehgelenk "festgemacht".. Wie muss ich jetzt das schwarze Modul (links drehbar gelagert) und den roten Zylinder referenzieren, dass sich der Arm nach vorne bewegen lässt?
------------------
Wer fehler Findet darf sie behalten Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Rainer Schulze
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. im Ruhestand
Beiträge: 4419
Registriert: 24.09.2012
|
erstellt am: 21. Jan. 2016 01:57 <-- editieren / zitieren --> Unities abgeben: Nur für lausbub1504
>>Wie muss ich jetzt das schwarze Modul (links drehbar gelagert) und den roten Zylinder referenzieren, dass sich der Arm nach vorne bewegen lässt? Da staune ich über das Bild.
Es erscheint so, als würde die Kraft des Zylinders genau auf die Drehachse (rotes Kreuz) wirken.
So kann kein Drehmoment entstehen.
Ist das nur eine ungünstige Abbildung oder ist das Modell falsch zusammen gebaut? Angenommen, die Endstellung des Arms sei 45 Grad weiter im Uhrzeigersinn:
Der rote Zylinder ist ein Linearantrieb, dessen rechtsseitiger Angriffspunkt im roten Kreis liegt.
Im Kinematikmodell ist ein zusätzlicher Hebel vom Zentrum des roten Kreises zum roten Kreuz einzufügen,
links mit Drehgelenk, rechts starr mit dem Arm verbunden.
Das wirksame Drehmoment ergibt sich dann aus der Länge dieses kleinen Hebels und der Kraftkomponente die senkrecht auf den Hebel wirkt. Das ist eine relativ ungünstige Übersetzung. Je kleiner der Winkel zwischen Zylinder und dem zusätzlichen Hebel ist, desto geringer wird das Drehmoment. Und in der gestreckten Lage - wie dargestellt - wird das Drehmoment Null.
Vermutlich ist die Auslegung so gedacht, dass der Arm keinesfalls über die Senkrechte hinaus nach links bewegt werden soll.
Hast Du ein detailliertes Datenblatt dem Du die Grenzen der Bewegung entnehmen kannst? ------------------
Rainer Schulze [Diese Nachricht wurde von Rainer Schulze am 21. Jan. 2016 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Torsten Niemeier
Ehrenmitglied V.I.P. h.c.
Maschinenbau Ingenieur

Beiträge: 3901
Registriert: 21.06.2001 "ZUSE I.36", 8 BIT, 32 Lämpchen, Service-Ölkännchen "ESSO-Super", Software: AO auf Kuhlmann-Parallelogramm-Plattform
** CSWP 04/2011 **
** CSWE 08/2011 **
|
erstellt am: 21. Jan. 2016 03:16 <-- editieren / zitieren --> Unities abgeben: Nur für lausbub1504
Oh Mann!  Der schwarze Zylinder mit den beiden Speichern ist der Gewichtsausgleich des KuKA. In der derzeitigen Stellung der Achse 2 Arm senkrecht soll dieser Zylinder auch kein Drehmoment auf die Achse 2 ausüben, denn da gibt es gerade relativ wenig auszugleichen!
Der Antrieb für diese Achse ist ein normaler Servo mit Getriebe auf der gegenüberliegenden Seite.
BTW") : In meiner eigenen Kinematik in SWX simuliere ich die Bewegung des Dings nicht mit. Ist für die Funktion relativ unwichtig und kann auch kaum mit irgendwas kollidieren. : In meiner eigenen Kinematik in SWX simuliere ich die Bewegung des Dings nicht mit. Ist für die Funktion relativ unwichtig und kann auch kaum mit irgendwas kollidieren. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Rainer Schulze
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. im Ruhestand
Beiträge: 4419
Registriert: 24.09.2012
|
erstellt am: 21. Jan. 2016 06:09 <-- editieren / zitieren --> Unities abgeben: Nur für lausbub1504
>>Oh Mann! Tut mir ja leid, dass ich den Roboter nicht besonders gut kenne. >>Ist für die Funktion relativ unwichtig
>>Ich will den energieverbrauch des Roboters virtuell simulieren Torsten,
da es dem Lausbub nicht um eine Kollisionsanalyse geht sondern um den Energieverbrauch, wäre es wohl hilfreich, wenn Du noch ein paar Worte mehr für die Erklärung der Funktion des Gewichtsausgleichs spendierst.
Wenn Servo und Getriebe im Drehgelenk entlastet werden, bedeutet das sicherlich einen geringeren Verschleiß. Aber was bedeutet es für die Energiebilanz? ------------------
Rainer Schulze Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Torsten Niemeier
Ehrenmitglied V.I.P. h.c.
Maschinenbau Ingenieur
Beiträge: 3901
Registriert: 21.06.2001 "ZUSE I.36", 8 BIT, 32 Lämpchen, Service-Ölkännchen "ESSO-Super", Software: AO auf Kuhlmann-Parallelogramm-Plattform
** CSWP 04/2011 **
** CSWE 08/2011 **
|
erstellt am: 21. Jan. 2016 07:20 <-- editieren / zitieren --> Unities abgeben: Nur für lausbub1504
Gut gekontert!  Ich habe mir da noch nie Gedanken drüber gemacht. Funktionell ist das nur ein Hydraulikzylinder mit Druckspeicher. Also quasi eine Feder. Dürfte im großen und ganzen neutral sein. Was man reinsteckt, kriegt man wieder raus. Natürlich müssen ein paar Komponenten, zwangsläufig reibungsbehaftet, mitbewegt werden, aber ob man das tatsächlich merkt? Ein gewisser Vorteil könnte sich ergeben, wenn der Roboter in ausgestreckter Position über längere Zeiträume praktisch in Lageregelung gehalten werden muss. Aber eigentlich ist das ja nicht das übliche Anwendungsschema. Das zu bewerten wäre IMHO auch schon ganz schön tief in das Thema eingestiegen. Ob das so gewünscht ist? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
lausbub1504
Mitglied
Student
Beiträge: 9
Registriert: 20.01.2016 Schnöder Laptop mit I3 Prozessor, Nvidia Geforce Cuda, 500Gb SSD und 16Gb Ram..
Win 7 64bit
|
erstellt am: 21. Jan. 2016 13:18 <-- editieren / zitieren --> Unities abgeben:
Diesen Ausgleich als Feder zu betrachten, der Ansatz is nicht mal schlecht =) Leider weis ich immer noch nicht wie ich diese bewegung hinbekomme, also dass sich alle teile mitbewegen.. Kann mir hier evtl noch jmd weiterhelfen? ------------------
Wer fehler Findet darf sie behalten Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Rainer Schulze
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. im Ruhestand
Beiträge: 4419
Registriert: 24.09.2012
|
erstellt am: 22. Jan. 2016 08:01 <-- editieren / zitieren --> Unities abgeben: Nur für lausbub1504
|

 Foren auf CAD.de
Foren auf CAD.de