| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für NX |
| | |
 | Simulation Herbsttagung | 25. - 26. November 2026 | Institut für Forschung und Entwicklung von Sportgeräten, Berlin + Online Termin: in 3 Monaten |
| | |
 | BCT Technology AG übernimmt CASCATE GmbH, eine Pressemitteilung
|
|
Autor
|
Thema: Relativbewegung Schieberegler (2687 mal gelesen)
|
Jepedaja
Mitglied
Student
   Beiträge: 5
Registriert: 09.12.2013 Nx 8.5
|

 erstellt am: 09. Dez. 2013 15:48
erstellt am: 09. Dez. 2013 15:48  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hey liebe Nx-ler, ich habe folgendes problem:
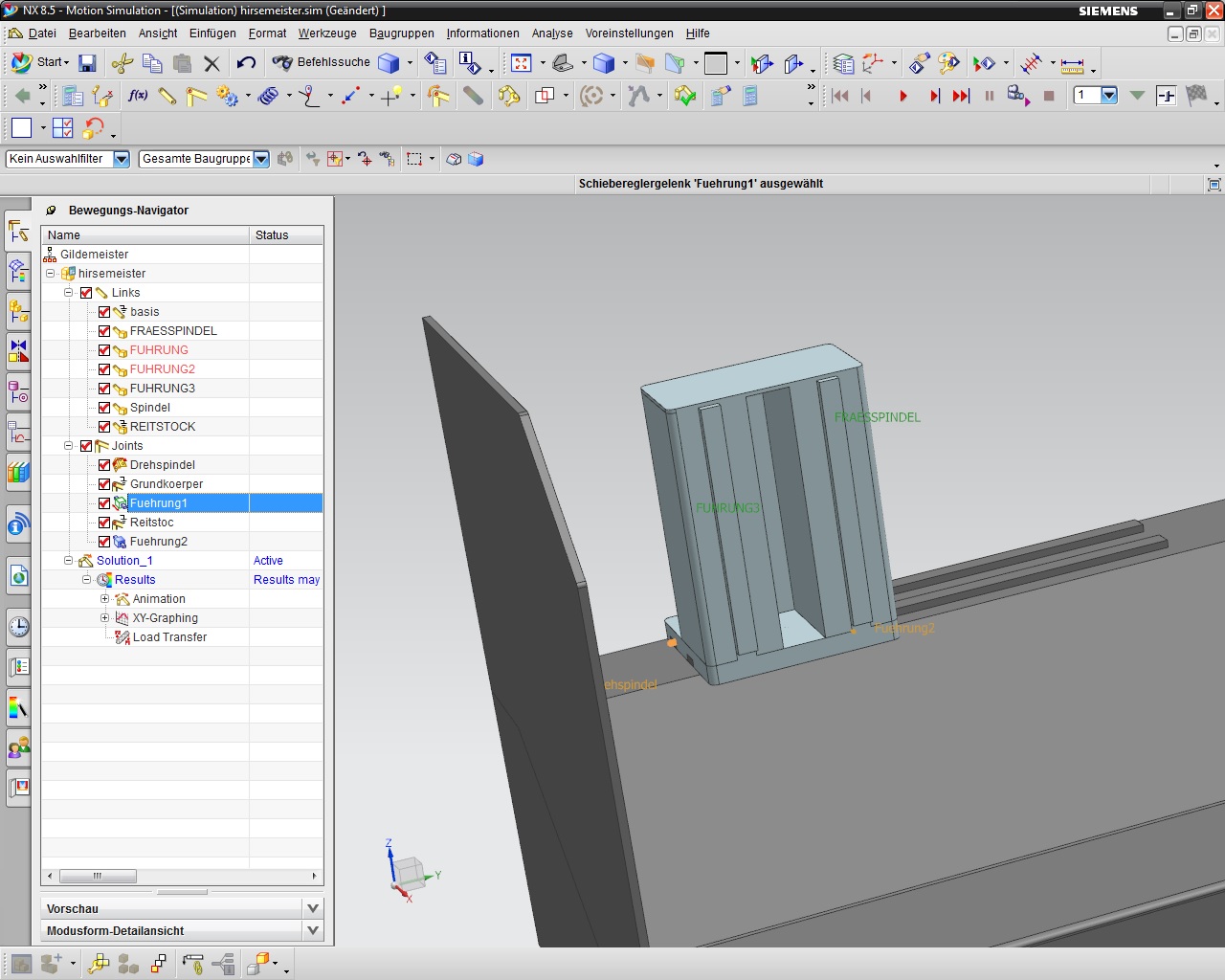
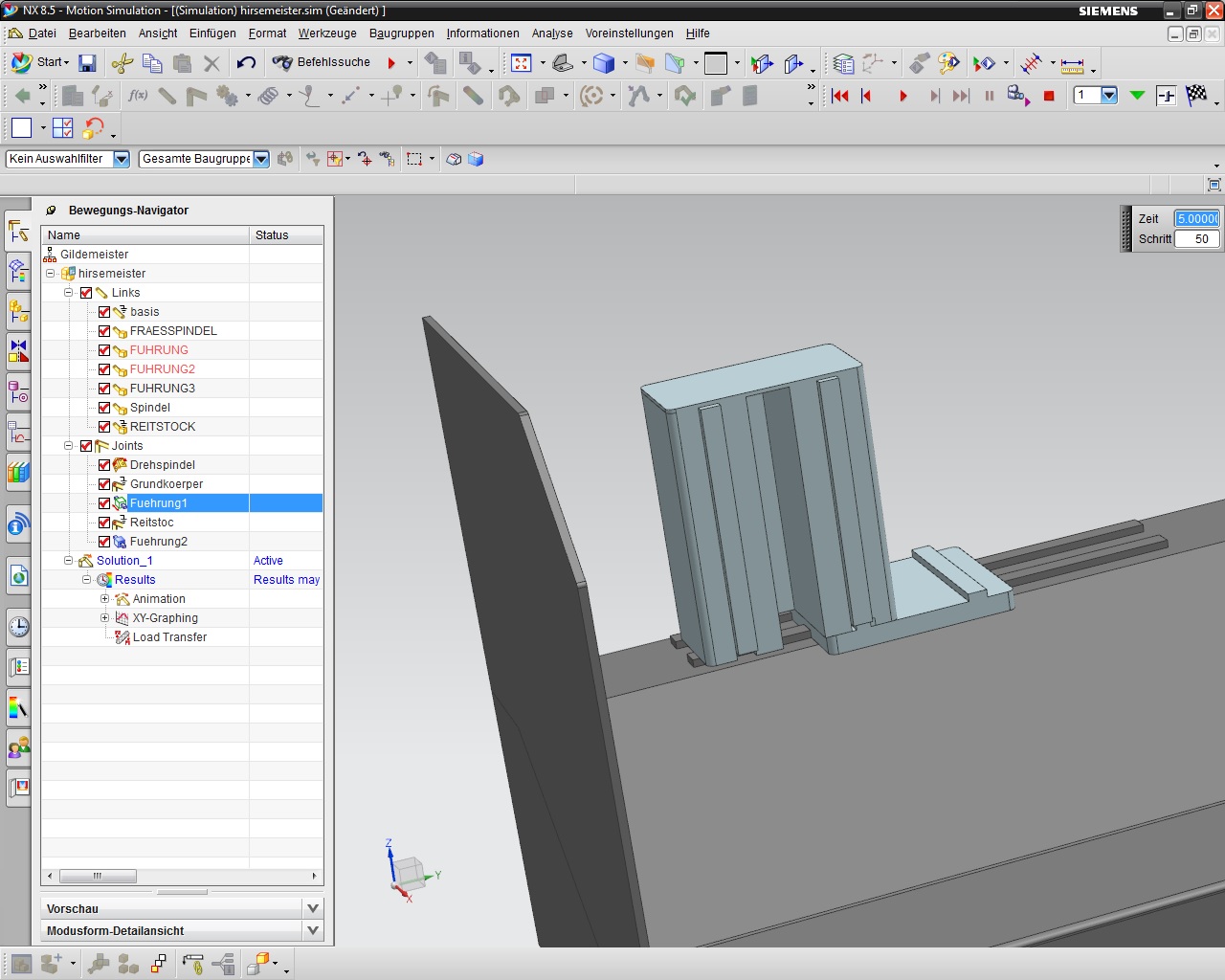
Für ein Uniprojekt muss ich eine Werkzeugmaschine simulieren und bin versuche mich gerade mit hilfe diverser Lektüre in die Simulation einzuarbeiten. Momentan hänge ich leider an der Aufgabe 2 Führungen in Abhängigkeit voneinander zu bewegen. Die Hauptführung soll in Y-Richtung wandern und die darauf sitzende soll sich in X richtung bewegen.
Jedoch konnt ich bisher nicht herausfinden, wie sich links in Abhängigkeit voneinander bewegen, bisher trennen sich die beiden Körper voneinander. Ich hoffe ich konnte mein Problem deutlich machen, vermutlich sehe ich die ganze zeit nur den Wald vor lauter Bäumen nicht und die Lösung ist recht leicht zu erarbeiten. Danke im vorraus  Fabian Pilz [Diese Nachricht wurde von Jepedaja am 09. Dez. 2013 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
uger
Mitglied
CADler & Kinematiker

Beiträge: 1135
Registriert: 25.02.2003 NX2015
WIN10 64Bit
|
 erstellt am: 10. Dez. 2013 08:55 <-- editieren / zitieren --> Unities abgeben: Nur für Jepedaja
erstellt am: 10. Dez. 2013 08:55 <-- editieren / zitieren --> Unities abgeben: Nur für Jepedaja 
Wenn ich es richtig verstanden habe.... 1. Gelenkkombination
Gestell -- X-Schubgelenk -- Hilfskörper 2. Gelenkkombination
Hilfskörper -- Y-Schubgelenk -- Schraubstock Der Hilfskörper stellt die Verbindung der beiden Schubgelenke dar. Es kann sich dabei einfach um einen Würfel handeln. uger
------------------

Deine Wahrnehmung bestimmt deine Realität! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
inv
Mitglied
CAx Consultant
Beiträge: 641
Registriert: 07.02.2006 Windows 10
Unigraphics (v16 - v18)
NX1 - NX12
NX (Continuous Release)
CatiaV5 R22
|
erstellt am: 10. Dez. 2013 10:04 <-- editieren / zitieren --> Unities abgeben: Nur für Jepedaja
Hallo Jepedaja, kann es sein, dass Du beim Definieren der Gelenke nicht beide Links ausgewählt hast? Wenn Du ein Gelenk mit zwei kinematischen Einheiten (Links) definierst, musst Du im oberen Bereich des Dialogs den einen Link und im unteren Bereich den zweiten Link auswählen. Dadurch sind die beiden Links, auch ohne Hilfskörper miteinander verbunden. Bewegt sich der Untere, wird sich auch der Obere mit bewegen. Jetzt kannst Du noch einen Antrieb definieren und schon bewegt sich der obere relativ zum unteren. Den unteren kannst Du dann mit einem neuen Gelenk relativ zum Boden definieren und mit einem Antrieb kann entsteht dann eine zweite Bewegung. Die Richtung der Gelenke bestimmt dann, in welche Richtung die Bewegung erfolgt. Gruß André Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Jepedaja
Mitglied
Student
Beiträge: 5
Registriert: 09.12.2013 Nx 8.5
|
erstellt am: 10. Dez. 2013 10:39 <-- editieren / zitieren --> Unities abgeben:
|

 Foren auf CAD.de
Foren auf CAD.de



 |
|