| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für NX |
| | |
 | Additiv Herbsttagung | 22. Oktober 2026 | KSB SE & Co. KG, Pegnitz Termin: in 3 Monaten |
| | |
 | NX Basis Training , ein Seminar am 06.07.2026
|
|
Autor
|
Thema: Drehgelenk verschiebt sich (3211 mal gelesen)
|
MaNe88
Mitglied
Student
   Beiträge: 8
Registriert: 10.04.2013 Win XP
NX 6.0.2.8
|

 erstellt am: 10. Apr. 2013 13:59
erstellt am: 10. Apr. 2013 13:59  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
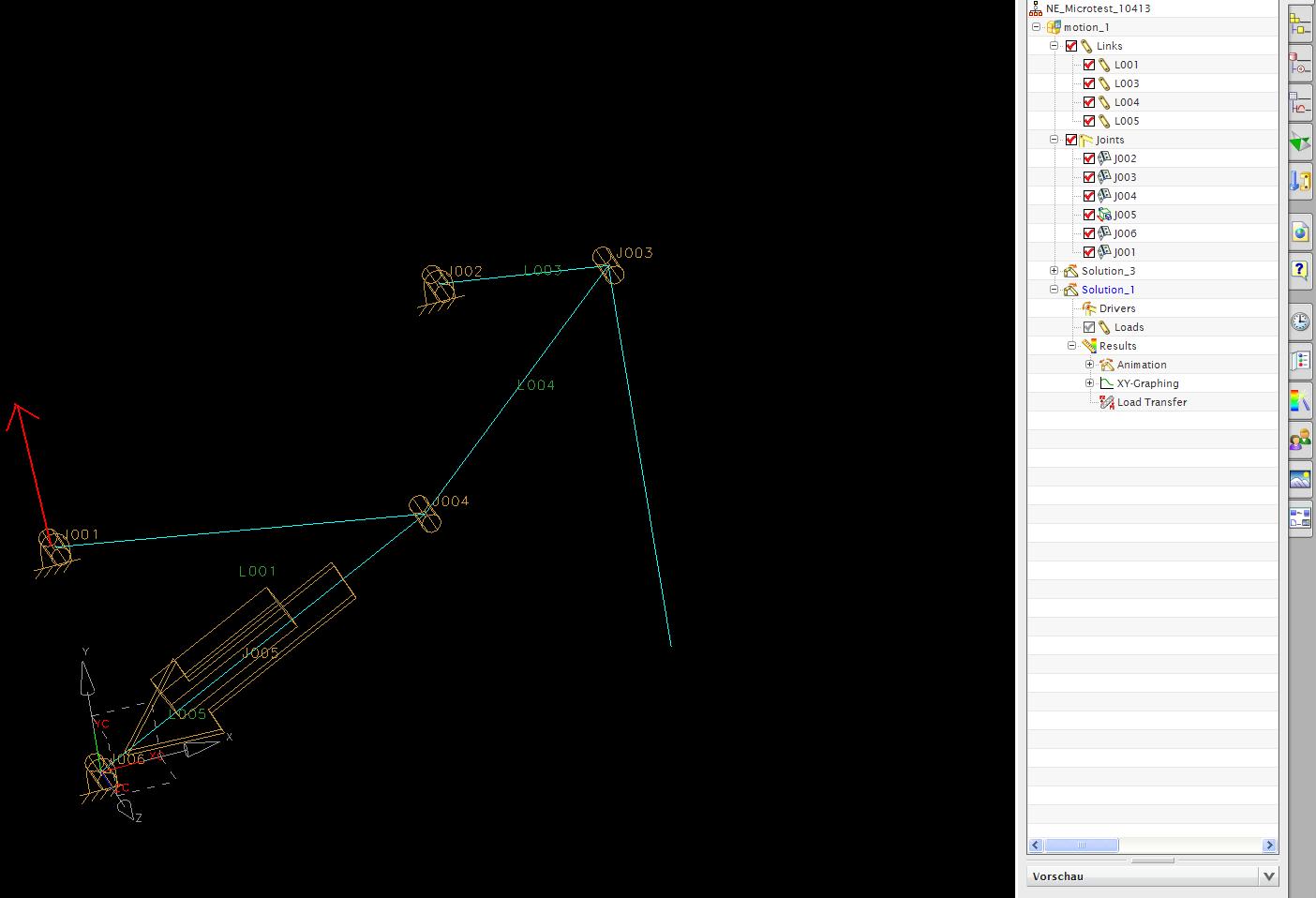
Hab folgendes Problem, habe ein einfaches Linienmodell mit einen Fahrer=Antrieb im Schubgelenk. Wenn ich das Ganze jetzt simuliere, verschiebt sich das Drehgelenk J001 (in Richung des Pfeils) und ich versteh einfach nicht warum. Benutze NX6 Motion Simulation. Evtl. kann mir ja jmd von euch weiterhelfen. Gruß [Diese Nachricht wurde von MaNe88 am 10. Apr. 2013 editiert.] [Diese Nachricht wurde von MaNe88 am 10. Apr. 2013 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Rainer Schulze
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. im Ruhestand

Beiträge: 4419
Registriert: 24.09.2012
|
erstellt am: 10. Apr. 2013 14:49 <-- editieren / zitieren --> Unities abgeben: Nur für MaNe88 
>>und ich versteh einfach nicht warum Geht mir ähnlich.
Wie können J001, J002 und J006 zugleich Drehgelenke und Fixierungen sein?
Wie kann J004 gleich DREI Links L001, L004 und L005 verknüpfen?
Aus der Online-Hilfe:
>>Ein Drehgelenk verknüpft zwei Verbindungen Fehlt es mir da an Expertise, oder hast Du etwas nicht richtig verstanden? ------------------
Rainer Schulze Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
MaNe88
Mitglied
Student
Beiträge: 8
Registriert: 10.04.2013 Win XP
NX 6.0.2.8
|
erstellt am: 10. Apr. 2013 14:53 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von Rainer Schulze:
>>und ich versteh einfach nicht warumGeht mir ähnlich.
Wie können J001, J002 und J006 zugleich Drehgelenke und Fixierungen sein?
Wie kann J004 gleich DREI Links L001, L004 und L005 verknüpfen?
Aus der Online-Hilfe:
>>Ein Drehgelenk verknüpft zwei Verbindungen Fehlt es mir da an Expertise, oder hast Du etwas nicht richtig verstanden?
J004 verbindet nur L001 (das sind beide Arme/Linien) mit L004. L005 ist über das Schubgelenk mit L001 verbunden.
J001, J002 und J006 sind Ortsfeste Drehgelenke (Lagerpunkte)
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
uger
Mitglied
CADler & Kinematiker
Beiträge: 1135
Registriert: 25.02.2003 NX2015
WIN10 64Bit
|
erstellt am: 10. Apr. 2013 15:55 <-- editieren / zitieren --> Unities abgeben: Nur für MaNe88
Zitat:
J004 verbindet nur L001 (das sind beide Arme/Linien) mit L004[/i]
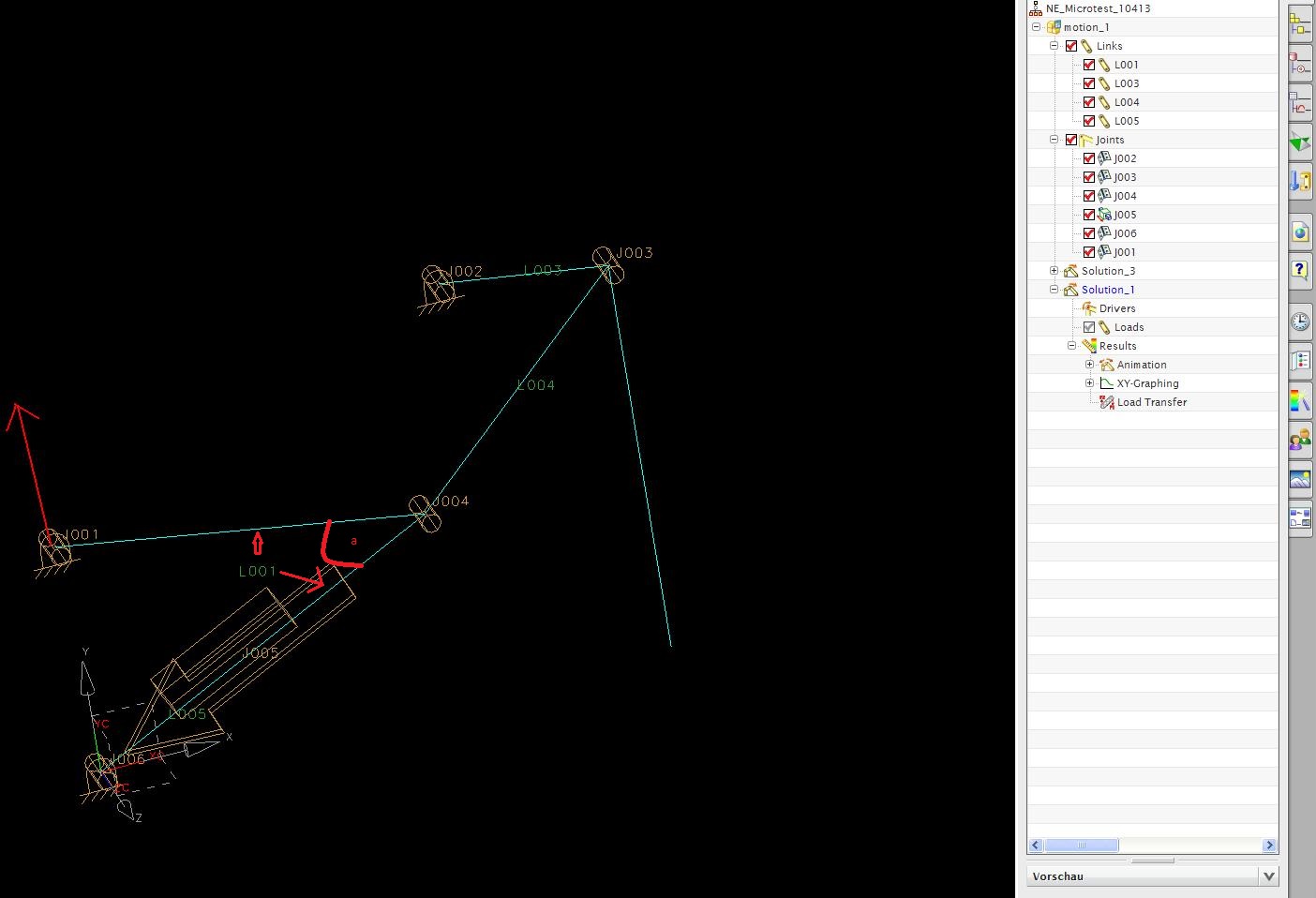
Das heisst der Winkel zwischen den Linien kann sich nicht ändern (weil sie zu gleichen Link gehören)? Dann kann das doch nicht klappen. Ich vermute dass zwischen J001, J004 J003 und J002 ein einfaches Viergelenkgetriebe liegt welches über das Schubgelenk angetrieben wird. Dazu muss sich aber oben genannter Winkel ändern können. Oder hab ich was nicht durchblickt? uger ------------------

Deine Wahrnehmung bestimmt deine Realität! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
MaNe88
Mitglied
Student
Beiträge: 8
Registriert: 10.04.2013 Win XP
NX 6.0.2.8
|
erstellt am: 10. Apr. 2013 16:10 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von uger:
Das heisst der Winkel zwischen den Linien kann sich nicht ändern (weil sie zu gleichen Link gehören)? Dann kann das doch nicht klappen. Ich vermute dass zwischen J001, J004 J003 und J002 ein einfaches Viergelenkgetriebe liegt welches über das Schubgelenk angetrieben wird. Dazu muss sich aber oben genannter Winkel ändern können. Oder hab ich was nicht durchblickt? uger
Ja das ist ein Viergelenk jedoch hat dieses (jedes) meiner Meinung nach 1 Freiheitsgrad. Die "Verlängerung" zum Schubgelenk führt hierbei zu keiner Veränderung. Durch das Schubgelenk wird der letzte Freiheitsgrad bestimmt -> F=0 dabei spielt der Winkel a keine Rolle. Und selbst wenn es daran liegen würde dürfte sich das Gelenk nicht nach oben verschieben sondern eine Fehlermeldung kommen und eine Simulation nicht möglich sein.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
uger
Mitglied
CADler & Kinematiker
Beiträge: 1135
Registriert: 25.02.2003 NX2015
WIN10 64Bit
|
erstellt am: 10. Apr. 2013 16:24 <-- editieren / zitieren --> Unities abgeben: Nur für MaNe88
Stimmt soweit. Jetzt habe ich es durchblickt (glaube ich). Wie sieht denn der Antrieb für das Schubgelenk aus? Oftmals kann der Solver einige Schritte rechnen, danach kommt das Getriebe aber in eine Lage die nicht mehr lösbar ist. (Wenn J004 durch das Schubgelenk z.B. soweit "rausgeschoben" wird dass es sich nicht mehr auf dem vorgesehenen Radius um J001 befinden kann.) uger
------------------
Deine Wahrnehmung bestimmt deine Realität! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
MaNe88
Mitglied
Student
Beiträge: 8
Registriert: 10.04.2013 Win XP
NX 6.0.2.8
|
erstellt am: 10. Apr. 2013 16:34 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von uger:
Stimmt soweit. Jetzt habe ich es durchblickt (glaube ich).Wie sieht denn der Antrieb für das Schubgelenk aus? Oftmals kann der Solver einige Schritte rechnen, danach kommt das Getriebe aber in eine Lage die nicht mehr lösbar ist. (Wenn J004 durch das Schubgelenk z.B. soweit "rausgeschoben" wird dass es sich nicht mehr auf dem vorgesehenen Radius um J001 befinden kann.) uger
Das könnte der Grund sein habe gerade gesehen das ich in meiner Überlegung ein Drehgelenk vergessen habe das J005 mit J001 als Drehgelenk um Z und Schubgelenk entlang J005-> J001 sein muss. Wenn man J005 und J001 parallel statt Schub setzt und den Antrieb in J001 sieht man das es so nicht klappen kann. Trotzdem interessant das NX das feste Drehlager dann einfach verschiebt ^^. Vielen Dank trotzdem für die Antworten Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Rainer Schulze
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. im Ruhestand
Beiträge: 4419
Registriert: 24.09.2012
|
erstellt am: 10. Apr. 2013 17:00 <-- editieren / zitieren --> Unities abgeben: Nur für MaNe88
>>Ortsfeste Drehgelenke Die habe ich nicht in meinem Auswahlmenü - siehe Bild. Kannst Du Dein Modell mal ins Forum laden?
Ich möchte mir gerne in NX anschauen, was Du da zauberst. ------------------
Rainer Schulze Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
MaNe88
Mitglied
Student
Beiträge: 8
Registriert: 10.04.2013 Win XP
NX 6.0.2.8
|
erstellt am: 10. Apr. 2013 17:02 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von Rainer Schulze:
>>Ortsfeste Drehgelenke Die habe ich nicht in meinem Auswahlmenü - siehe Bild. Kannst Du Dein Modell mal ins Forum laden?
Ich möchte mir gerne in NX anschauen, was Du da zauberst.
Das sind normale Drehgelenke du darfst sie nur nicht mit einem anderen joint/bauteil verbinden dann sind sie ortsfest
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Rainer Schulze
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. im Ruhestand
Beiträge: 4419
Registriert: 24.09.2012
|
erstellt am: 10. Apr. 2013 17:06 <-- editieren / zitieren --> Unities abgeben: Nur für MaNe88
|
MaNe88
Mitglied
Student
Beiträge: 8
Registriert: 10.04.2013 Win XP
NX 6.0.2.8
|
erstellt am: 11. Apr. 2013 07:03 <-- editieren / zitieren --> Unities abgeben:
|
falo72
Mitglied
Beiträge: 4
Registriert: 20.12.2012 NX8.5
|
erstellt am: 24. Apr. 2013 16:21 <-- editieren / zitieren --> Unities abgeben: Nur für MaNe88
Hallo MaNe. Du musst L001 in zwei Links aufteilen, also z.B. den unteren Strich in einen neuen Link geben. Dann zwischen dem L001 und dem neuen Link ein Drehgelenk platzieren und das Schiebergelenk anpassen,also anstatt dem L001 den neuen Link angeben. Die Kinematik sollte nun laufen, bis es geometrisch nicht mehr weitergeht. Warum sich das Drehgelenk verschiebt: Liegt am L001 aber auch daran, daß Deine Kinematik überbestimmt ist: 4 Links = 24 Freiheitsgrade (DOF) abzüglich 5 Drehgelenken (minus 5 mal 5 DOFŽs) ergibt schon DOF=-1 abzüglich 1 Schieber mit Antrieb (minus 6 DOFŽs) ergibt DOF=-7. NX löscht selbstausgewählt Überbestimmungen raus, so daß Du dieses verschiebende Drehgelenk bekommst. Neben dem DOF ist auch der Grübler Count wichtig, der sollte möglichst immer "0" sein. Der gibt nämlich die Überbestimmungen (over-constraints) an. NX gibt unter Information Motion COnnections für den DOF minimal "0" aus, also keinen negativen Wert, also siehst Du daran nicht, ob Deine Kinematik überbestimmt ist. Hoffe, ich konnte weiterhelfen. Grüßle Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|