| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für NX |
| | |
 | Simulation Herbsttagung | 25. - 26. November 2026 | Institut für Forschung und Entwicklung von Sportgeräten, Berlin + Online Termin: in 3 Monaten |
| | |
 | NX Learning Nugget: Große Baugruppen, ein Kurs
|
|
Autor
|
Thema: Kinematik Zahnradpaarung NX 7.5 (6427 mal gelesen)
|
09ppan
Mitglied
Dipl. Wirtsch. Ing. (BA)

   Beiträge: 57
Registriert: 25.05.2012 NX 7.5
|

 erstellt am: 14. Nov. 2012 12:56
erstellt am: 14. Nov. 2012 12:56  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
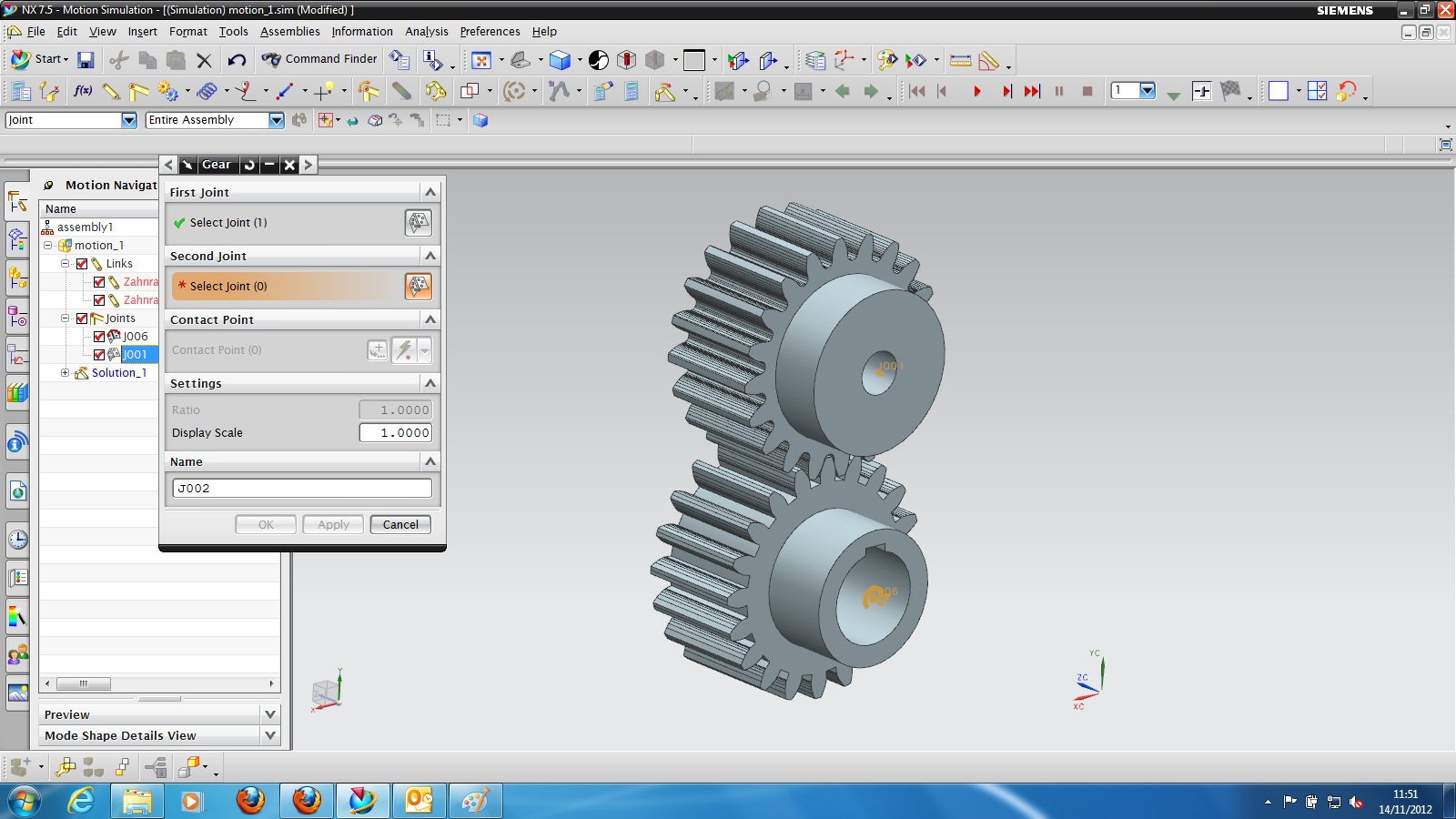
Hallo Leute, ich muss mich mit der Kinematikumgebung in NX 7.5 vertraut machen. Eine einfache Kinematik hab ich auch schon zustande gebracht. Ich moechte nun zwei Zahnraeder mit einaner Verbinden und brauchte hier mal ein wenig Unterstuetzung. Im angehaengten Bild seht Ihr die zwei Zahnraeder. Die Links sind erstellt und ich habe auch die zwei Joints vom Typ "resolute" verknuepft. "J006" ist ein resolute Joint was einen eigenen konstanten Treiber hat und spezifizierter Richtung. J001 ist ein resolute Joint ohne Driver mit spezifizierter Richtung und mit dem unteren Zahnrad verknuepft. Nun will ich eine Zahnradpaarung erstellen und versuche die beiden resolute Joints anzuwaehlen (Bild 2). Das erste Joint ist "J006" das zweite sollte nun "J001" sein, allerdings kann ich es nicht auswaehlen. Was mache ich denn da Falsch? Noch ne Frage am Rande: Unter Informationen ist noch ein Freiheitsgrad offen. Wird dieser mit der Zahnradpaarung eliminiert oder muss ich noch ein weiteres Joint definieren? Sollten Informaionen fehlen liefer ich sie gerne noch nach.
Danke schonmal
09ppan Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Rainer Schulze
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. im Ruhestand
Beiträge: 4419
Registriert: 24.09.2012
|
erstellt am: 14. Nov. 2012 13:32 <-- editieren / zitieren --> Unities abgeben: Nur für 09ppan 
>>Was mache ich denn da Falsch? So "frei schwebend" geht das nicht.
Aus der Online-Hilfe zu NX6:
Beide Drehgelenke müssen eine gemeinsame zweite Verbindung haben. Und wie hast Du eigentlich die Joints definiert?
Zitat: Ein Gelenk zwangsbedingt die Bewegung zwischen zwei Verbindungen oder einer Verbindung und dem Boden.
Meine Anmerkung: "Verbindung" meint hier "Körper".
Und ich sehe nicht, gegenüber welchen Körpern sich Deine Zahnräder drehen sollen. Üblicherweise sitzen Zahnräder auf Wellen, und diese sind irgenwo gelagert.
Und ein Punkt der Anordnung muß als Referenzpunkt "geerdet" oder "fixiert" sein.
Also bau Dir einen kleinen Rahmen für das Ganze.... ------------------
Rainer Schulze [Diese Nachricht wurde von Rainer Schulze am 14. Nov. 2012 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
09ppan
Mitglied
Dipl. Wirtsch. Ing. (BA)
Beiträge: 57
Registriert: 25.05.2012 NX 7.5
|
erstellt am: 14. Nov. 2012 14:04 <-- editieren / zitieren --> Unities abgeben:
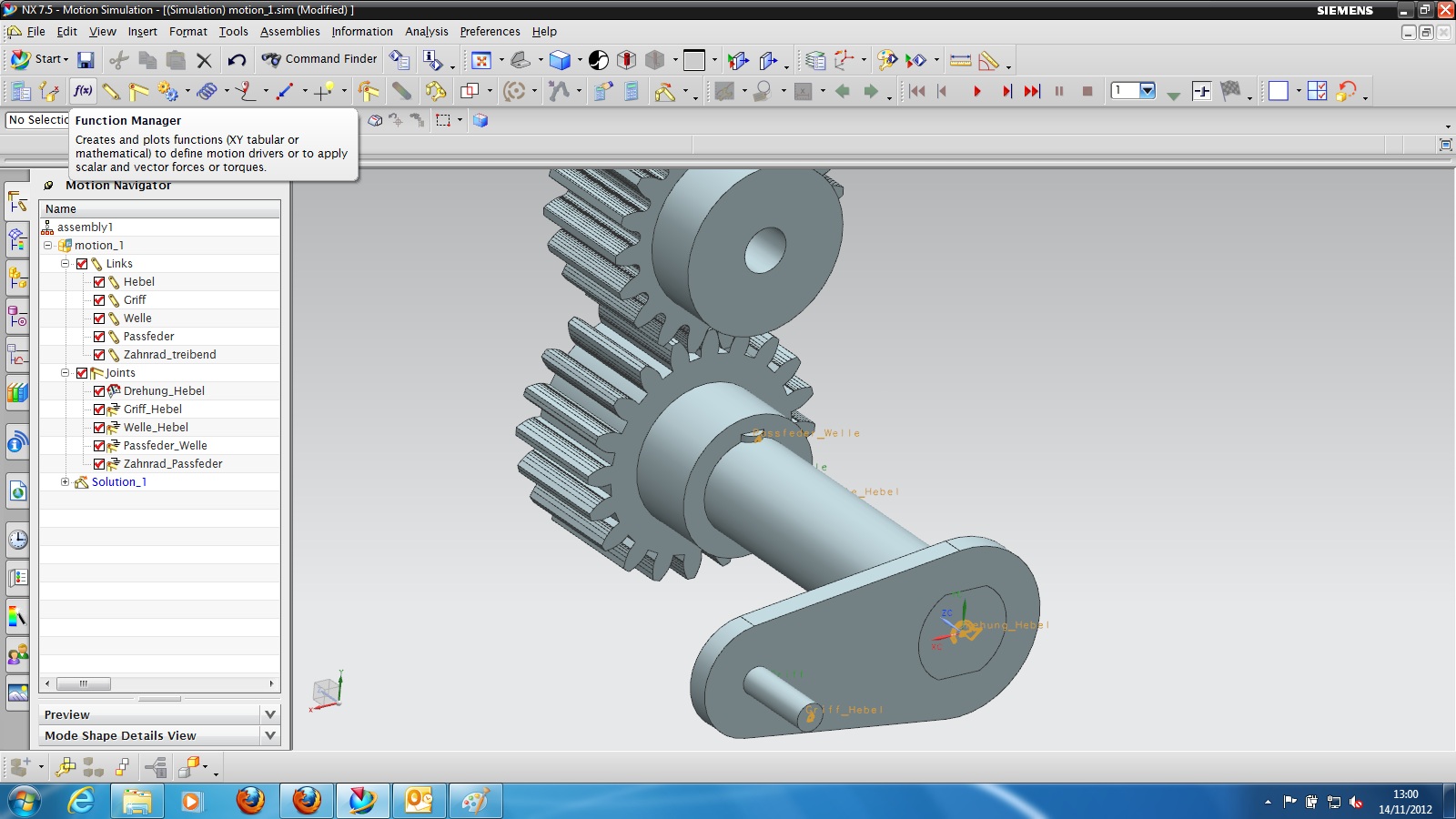
Ok danke erstmal fuer die schnelle Antwort. Um erstmal das triebened Zahnrad drehen zu koennen, hab ich die Definition der Links und Joints wie im Bild 3 definiert. Ergebnis: Alles was auf der Welle sitzt, dreht sich....ich dachte nur das ich erstmal die Zahnraeder zum laufen bringen muss um Fehlerquellen zu minimieren weshalb ich den Rest ausgeblendet hatte. Evtl wird das jetzt klarer....nun muss ich eine Verbindung aendern oder neu hinzufuegen damit sich das andere Zahnrad dreht. Muss ich noch was anderes beachten oder sind hier schon Fehler drinn? Gruesse
09ppan [Diese Nachricht wurde von 09ppan am 14. Nov. 2012 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Rainer Schulze
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. im Ruhestand
Beiträge: 4419
Registriert: 24.09.2012
|
erstellt am: 14. Nov. 2012 16:48 <-- editieren / zitieren --> Unities abgeben: Nur für 09ppan
>>...ausgeblendet... Ah - Irreführung!  >>sind hier schon Fehler drinn? Wenn man das Modell nicht am Platz hat, ist es immer fragwürdig, ob man die Bilder richtig deutet.
Jetzt wundere ich mich über die Anzahl der Joints.
Ich hätte für das Kinematik-Modell an der Welle ALLES vom Handhebel bis zum Zahnrad gemeinsam selektiert und als nur EINEN Link definiert. Schliesslich besteht zwischen diesen Teilen eine starre Verbindung.
Dagegen sehe ich in der Liste der Links nur 1 Zahnrad.
Ich vermute, das Ganze wird mit dem Handhebel gedreht, und das "Zahnrad_treibend" ist das untere auf der Welle.
Dann fehlt das zweite Zahnrad als Link sowie neben der Zahnrad-Paarung die geforderte zweite mechanische Verbindung. Schließlich hat das obere Zahnrad keinerlei Halt im Raum - oder ist da wieder etwas ausgeblendet?
Also das obere Zahnrad auf eine Welle packen und beide Wellen über Drehgelenke mit einer gemeinsamen Basis verbinden. Diese Basis dann "fixieren".
Und lass Dir einfallen, wie Du den Freiheitsgrad in Z-Richtung beseitigen willst.
Ich habe nicht ohne Grund von einem "Rahmen" geschrieben...
------------------
Rainer Schulze Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
09ppan
Mitglied
Dipl. Wirtsch. Ing. (BA)
Beiträge: 57
Registriert: 25.05.2012 NX 7.5
|
erstellt am: 15. Nov. 2012 12:38 <-- editieren / zitieren --> Unities abgeben:
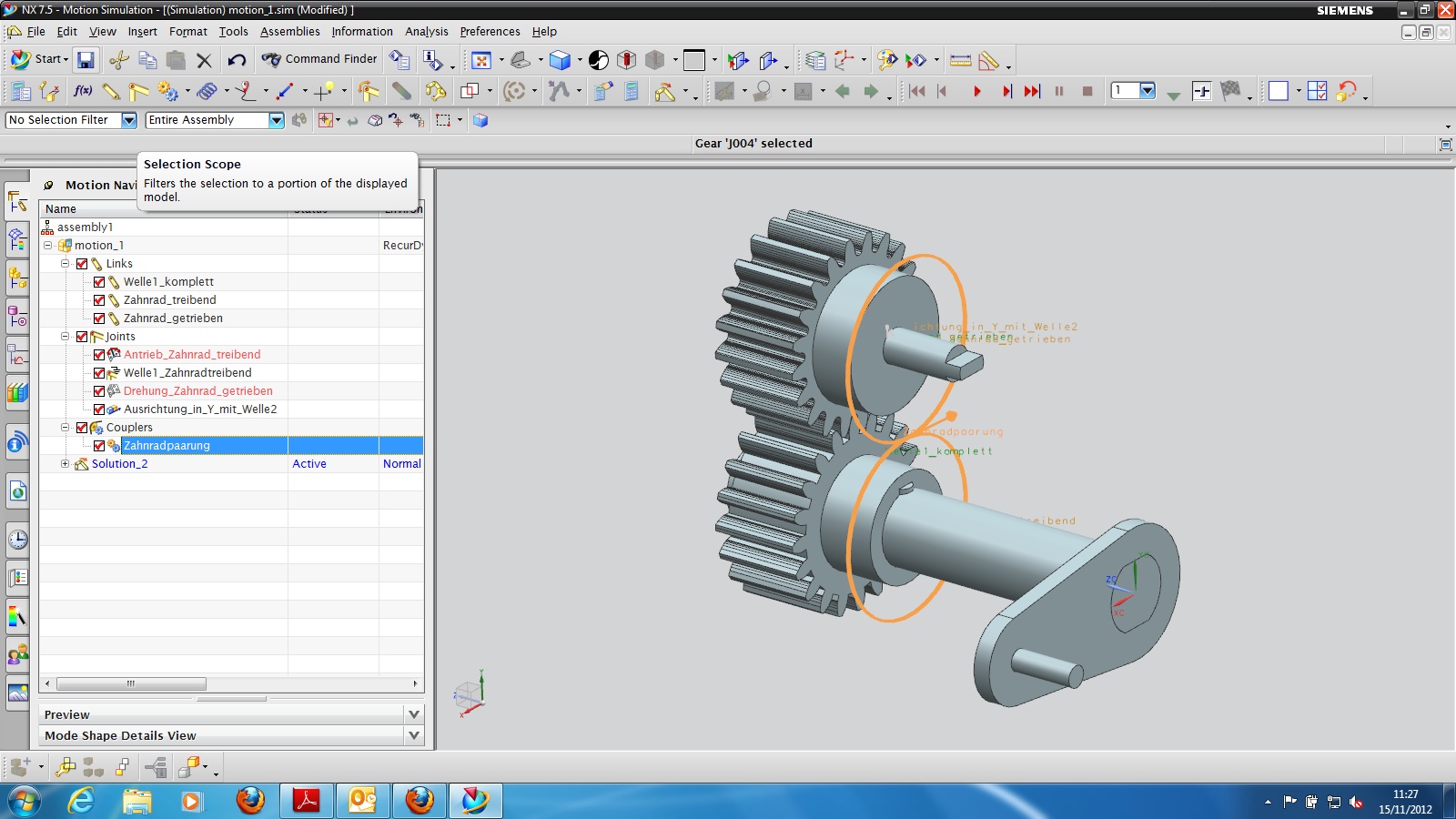
Cool! Vielen Dank Rainer.....deinen Tipp hab ich umgesetzt und es klappt nun. Im Bild 4 zu sehen hab ich vom Griff bis zur Passfeder alles als einen Link zusammengefasst (Welle1 komplett). Das treibende Zahnrad als einen Link (Zahnrad treibend). Das getriebene Zahnrad und Welle als dritten Link (Zahnrad getrieben). Danach ein resolute Joint mit konstanten Driver auf das treibende Zahnrad gelegt. Dann noch das treibende Zahnrad mit einem fix Joint mit "Welle 1 komplett" verknuepft. Somit ist die untere Welle fertig.
Danach ein resolute Joint ohne Driver auf das getriebene Zahnrad. Die Welle 2 besitzt anschliesend noch einen offenen Freiheitsgrad welchen ich elimieniere indem ich ein parallel Joint definiere in Y. Die parallele Ausrichtung muss zwischen Welle 2 und Welle 1 definiert werden. Das Ergebniss ist kein offener Freiheitsgrad mehr.
Anschliessend noch die Definition der Zahnradpaarung, dazu einfach neues Zahnradjoint definieren und die Beiden resolute Joints aus dem Motion-Navigator anwaehlen. Uebersetzungsverhaeltniss angeben, fertig. Danke nochmal und Gruesse!
09ppan Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|