Hi,
weiß nicht so genau, wo das alles hingehört, daher die Frage:
Ich habe einen Rahmen für den Vorderwagen eines Fahrzeugs konstruiert und über vereinfachte Einspannungen und Kraftangriffspunkte die Steifigkeit und die Festigkeit berechnet, soweit so gut.
Das soll jetzt allerdings verfeinert werden und die Kraftangriffspunkte sollen realitätsnaher angenommen werden. Bisher griffen alle Kräfte die vom Rad in den Rahmen eingeleitet wurden einfach am Domlager an, jetzt soll ein Ersatzsystem aus Querlenker und Federbein eingebracht werden, dass die Kraft tatsächlich am Reifen angreifen kann und die Kräfte im Rahmen besser verteilt sind.
Ich will also steife Balken einfügen, die quasi eine unendliche Steifigkeiten besitzen und gelenkig verbunden sind, gibts dafür eine Funktion? Habe in einer anderen Diplomarbeit was von Skeleton gelesen, aber auch dass das recht kompliziert ist. Bisher habe ich keinerlei Erfahrungen in DMU, daher hoffe ich, dass das auch anders zu realisieren ist.
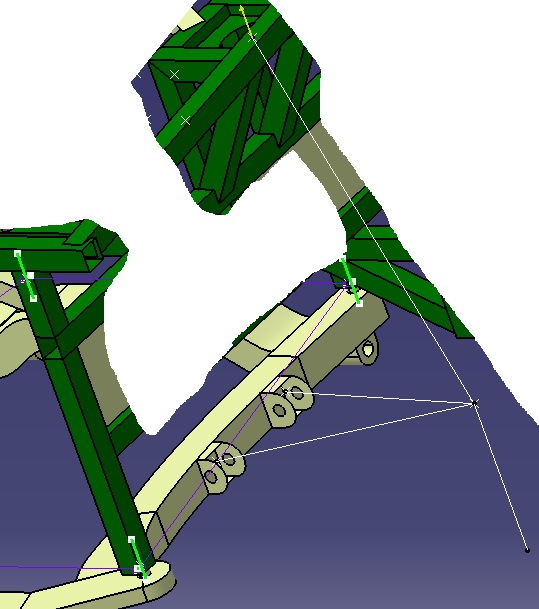
Anbei ein Screenshot, hoffe man erkennt das Notwendige, ich habe die Form der Balken als Linien schonmal angelegt, dachte, dass man das uU als starren Körper definieren kann und dem bewußt Eigenschaften zuweisen kann.
Ansonsten bitte ich um Nachsicht, wenn ich was vergessen oder misachtet habe, ist soweit ich weiß mein erster Beitrag, SuFu hat mir nicht geholfen.
Gruß und Danke!
Felix
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|