| | |
 | CATIA V5 Grundkurs | Einsteiger - 5 Std. 15 Min 48 |
| | |
 | Mit der Kisters 3DViewStation komplexeste 3D CAD-Daten beherrschen, eine Pressemitteilung
|
|
Autor
|
Thema: Hebelberechnung (3503 mal gelesen)
|
Michaf
Mitglied
   Beiträge: 6
Registriert: 09.07.2005
|

 erstellt am: 09. Jul. 2005 15:53
erstellt am: 09. Jul. 2005 15:53  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
hallo zusammen! ich möchte die Beanspruchung eines Hebels berechnen, er ist an einem punkt drehend gelagert. An den 2 anderen Anlenkpunkten wirken jeweils Kräfte unter verschiedenen Winkeln (Winkel und Kräfte eindeutig bekannt), um den Hebel im Gelichgewicht zu halten. Bei der Ansetzung der Kräfte an den beiden Angriffsstellen kommt bei der Rechnung eine Fehlermeldung. Anscheinende sind die Bedingungen nicht ausreichend bzw. die Momente der beiden Kräfte um den Drehpunkt sind nicht gleich und für das Programm ist der Hebel nicht im Gleichgewicht. Das Problem ist, dass die Kräfte in den Anlenkpunkten nicht orthogonal zur verbindungslinie Drehpunkt-Anlenkpunkt stehen somit kann ich anstatt der einen Kraft kein Festlager annehemen. Wie kann ich dieses Problem am besten lösen. Wie stelle ich den Drehpunkt im Programm da? mit Hilfe eines virtuellen Kontaktteils (virteuller Bolzen) und dieses dann als Drehachse? Was ist hier die beste Möglichkeit? Wie löse ich das Problem mit den Kräften, mit denen das Programm nicht klarkommt da die Momente für das Programm nicht eindeutig gleich sind? Gruss Michi Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bhd
Mitglied

Beiträge: 352
Registriert: 02.04.2004
|
erstellt am: 11. Jul. 2005 13:11 <-- editieren / zitieren --> Unities abgeben: Nur für Michaf 
|
Michaf
Mitglied
Beiträge: 6
Registriert: 09.07.2005
|
erstellt am: 11. Jul. 2005 13:37 <-- editieren / zitieren --> Unities abgeben:
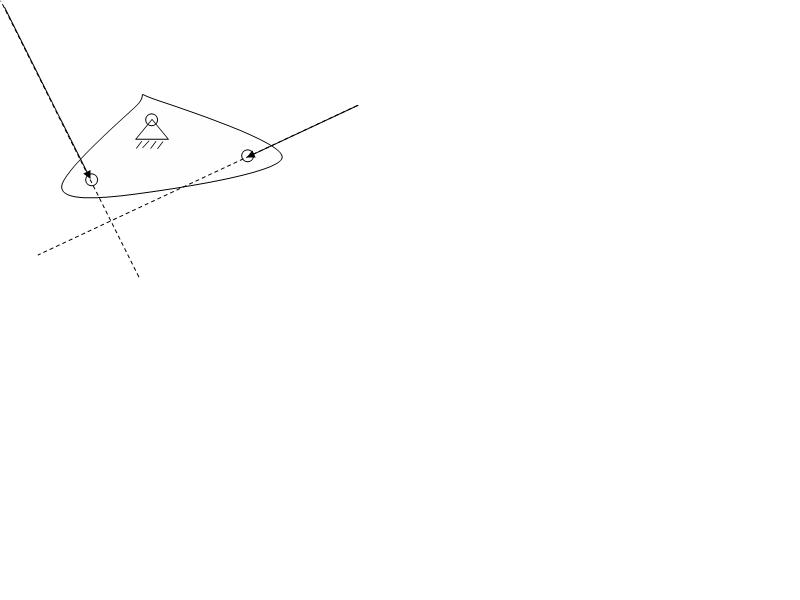
prinzipskizze anbei! hebel ist am drehpunkt gelagert. der betrag und richtung der rechten kraft sind bekannt. die wirkrichtung der linken kraft ist bekannt, damit kann man die größe der linken kraft berechnen, damit der hebel im gleichgewicht steht. ein cad bild des originalhebels hier zu veröffentlichen ist mir aus datenschutzgründen nicht geastattet. hoffe mir kann jemand weiterhelfen... Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bhd
Mitglied
Beiträge: 352
Registriert: 02.04.2004
|
erstellt am: 11. Jul. 2005 15:50 <-- editieren / zitieren --> Unities abgeben: Nur für Michaf
|
Michaf
Mitglied
Beiträge: 6
Registriert: 09.07.2005
|
erstellt am: 11. Jul. 2005 16:03 <-- editieren / zitieren --> Unities abgeben:
was ein surface slide ist weiss ich leider nicht. also sollte ich an beiden anlenkpunkten die kräfte definieren und im programm angeben und dann zusätzlich noch den surface slide damit das system im stillstand ist?! wie funktioniert das mit dem surface slide?? .ist es richtig wenn ich die drehachse im programm als drehachse um ein virtuellen Bolzen definiere? die möglichkeit die zylindrische gleitfläche des Drehpunktes als Gleitfläche darzustellen geht ja auch?! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bhd
Mitglied
Beiträge: 352
Registriert: 02.04.2004
|
erstellt am: 11. Jul. 2005 16:36 <-- editieren / zitieren --> Unities abgeben: Nur für Michaf
Surface Slide ist ein Gleitverbindung. Du kannst die Drehachse als Gleitverbindung definieren, dann ist jedoch der Freiheitsgrad in Drechachsenlängsrichtung offen und somit ist das Modell statisch unterbestimmt und es gibt ne Fehlermeldung. Natürlich geht das auch mit dem virtuellen Bolzen allerdings besteht das Problem dabei auch. Du mußt den Freiheitsgrad in Drehachsenrichtung blockieren und das geht indem Du irgendeine Fläche die senkrecht zur Drehachse steht als Flächengleitlagerung definierst. Auch ein ebenes System muß räumlich mindestens statisch bestimmt sein. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Michaf
Mitglied
Beiträge: 6
Registriert: 09.07.2005
|
erstellt am: 11. Jul. 2005 17:12 <-- editieren / zitieren --> Unities abgeben:
naja also normal zur Drehachse ist das System durch eine Flächenlagerung gelagert, das ist auch nicht das Problem. Für das Programm ergeben die beiden Kräfte nicht das gleiche Moment, somit ist das System unbestimmt, das ist das problem. Die Wirklinie der linken kraft ist bekannt, die größes ihres Betrages habe ich ausgerechnet. Das programm kommt jedoch damit nicht klar wenn ich die beiden Kräfte und deren Wirkrichtung definiere. Wenn ich anstatt der linken kraft ein Festlager annehmen würde würde es funktionieren, jedoch ist das Ergebnis dann nicht richtig, da die aufgenommene Kraft am Festlager eine bestimmte Wirkrichtung hat, und zwar normal zur Verbindung Drehpunkt-Lagerpunkt... Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Michaf
Mitglied
Beiträge: 6
Registriert: 09.07.2005
|
erstellt am: 11. Jul. 2005 17:21 <-- editieren / zitieren --> Unities abgeben:
|
bhd
Mitglied
Beiträge: 352
Registriert: 02.04.2004
|
erstellt am: 12. Jul. 2005 08:56 <-- editieren / zitieren --> Unities abgeben: Nur für Michaf
Bei der isostatischen Randbedingung werden die Randbedingungen vom System bestimmt und dass setzt die Lagerstellen bestimmt nicht dahin wo man es gern hätte. Ich hab mal so ein Modell erstellt wie Du es skizziert hast und es hat es ohne Probleme durchgerechnet. Wie wäre es wenn Du einen der beiden Anlenkpunkte mit Hilfe einer virtuellen Verbindung an einen Knoten bindest dessen Freiheitsgrade derart beschränkt werden, dass er nur Kräfte in der Richtung der Kraft aufnimmt. Die Kraft darfst Du dann natürlich nicht einleiten, die müßte dann als Ergebnis (Sensor) mit Deiner Handrechnung übereinstimmen. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
doeberc
Mitglied
ing
Beiträge: 125
Registriert: 15.01.2004 CATIA V5-R19
Siemens NX
Catia V4.2.4 (AIX 4.3.3)
|
erstellt am: 13. Jul. 2005 12:52 <-- editieren / zitieren --> Unities abgeben: Nur für Michaf
lege am besten erstmal ein Achsenkreuz an deine Kraftangriffspunkte, zB. dass z in Kraftrichtung zeigt.Dann leg ein virt. Part an die zugehoerigen Bohrungswandungen. Vergib dann mit dem Schneeflockenaehnlichen Knopf eine Randbedingung nur in Richtung z. Vielleicht klappt's dann. ------------------
Wenn etwas nicht klappt probier ich einfach was anderes - vielleicht klappt das auch nicht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Michaf
Mitglied
Beiträge: 6
Registriert: 09.07.2005
|
erstellt am: 13. Jul. 2005 14:45 <-- editieren / zitieren --> Unities abgeben:
also ich habe glaube ich vor kurzen eine richtige lösung gefunden. ich habe eine erweiterte randbedingung an die eine bohrung gesetztund die achsen der Randbedingung in wirkrichtung der kraft gelegt. somit habe ich "eingeschränkte bewegung zulassen" für die achse in richtung der kraft angewählt. somit müsste das system in alle anderen achsen keine kräfte aufnehmen. das ergebnis sieht auch ganz anständig aus. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|