|
Autor
|
Thema: Fördergut mit Roboter bestimmt umlagern (804 / mal gelesen)
|
mm1234
Mitglied
   Beiträge: 2
Registriert: 05.10.2023
|

 erstellt am: 05. Okt. 2023 17:39
erstellt am: 05. Okt. 2023 17:39  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo zusammen, Ich bin kompletter Anfänger und hänge schon länger an folgendem Problem: Ein PickundPlace Roboter soll drei verschiedene Fördergüter (klein, mittel, groß) von einer Einzelstation auf ein Förderhilfsmittel, dass sich auf einer Förderstrecke befindet, laden. Standardmäßig lädt er vier Stück egal welchen Typs von Fördergut auf das Förderhilfsmittel, welches danach auf dem Band weiter fährt (aktuell gelöst mit Sensor & Teil auf BE am Sensor aufladen). Ich möchte aber das:
- max. 1 großes
- max. 2 mittlere
- max. 1 mittleres und 2 kleine
- oder max. 4 kleine
aufgeladen werden.
Sobald eine der Bedingungen erfüllt ist und damit das Förderhilfsmittel voll ist, soll dieses auf dem Band weiter fahren. Ich hatte an eine If-Schleife gedacht, komme aber leider nicht weit, da mir die Kenntnisse fehlen. Brauche ich eine Methode für den Roboter und für das Förderhilfsmittel? Und wenn ja, wie könnte ich diese umsetzen? Vielen Dank im Voraus!
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
nadin1223
Mitglied
Ing.

Beiträge: 949
Registriert: 29.03.2016
|
erstellt am: 06. Okt. 2023 09:04 <-- editieren / zitieren --> Unities abgeben: Nur für mm1234 
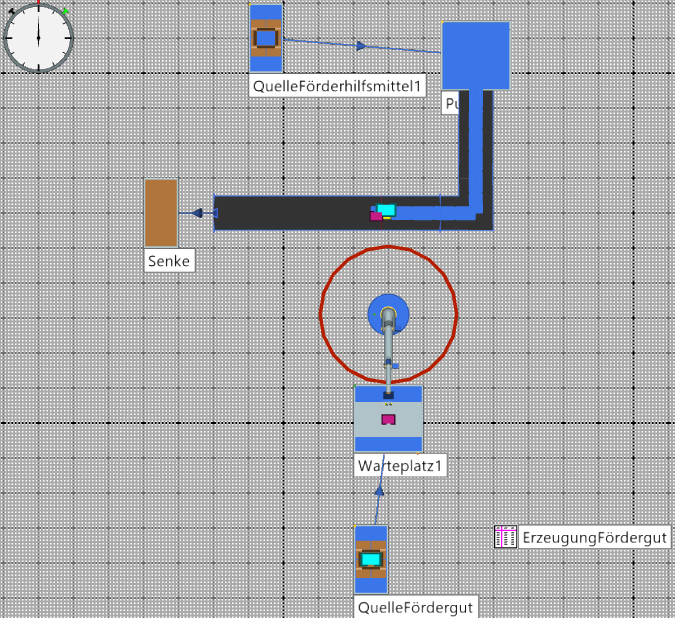
Moin, ja, du brauchst eine Methode. Die Frage welche hier noch offen ist, was macht die Logik, wenn 3 kleine auf Fördermittel und alles was wartet nicht passt (also nicht klein ist)? Bitte auch deinen derzeitigen Stand (Bild von Oben) oder ideal Modell-in ZIP hinzufügen (da gibt es einiges an Wegen, wie diese Aufgabenstellung angegangen werden kann^^) Beste Grüße
Nadin ------------------
Die einfachste Art an korrekte Informationen zu gelangen ist, etwas Falsches in ein Forum zu posten und auf die Korrektur zu warten. (Matthew Austern) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
mm1234
Mitglied
Beiträge: 2
Registriert: 05.10.2023
|
erstellt am: 06. Okt. 2023 10:03 <-- editieren / zitieren --> Unities abgeben:
|

| | Projektingenieur Simulation CAE (m/w/d) | Zusammen arbeiten, zusammen wachsen, zusammen Neues schaffen - EDAG verbindet Mensch und Zukunft. Wir bei EDAG teilen eine gemeinsame Vision. Bei uns können Sie Ihren eigenen Karriereweg gestalten - national oder international. Im Vehicle Engineering treiben wir mit Innovationsgeist und über 50 Jahren Expertise die Produktentwicklung für die Automobilbranche voran. Für eine erfolgreiche Entwicklung in der Zukunft setzen wir auf Ihr Know-how.... | | Anzeige ansehen | Feste Anstellung |
|
nadin1223
Mitglied
Ing.
Beiträge: 949
Registriert: 29.03.2016
|
erstellt am: 08. Okt. 2023 02:17 <-- editieren / zitieren --> Unities abgeben: Nur für mm1234
Beispiel, wie ein möglicher Lösungsansatz aussehen könnte, ist in der ZIP-Datei hinterlegt (Version 2201).  In diesem Beispiel wird das Event: "container ist eingetroffen und soll entladen werden" für das Auslösen der Methode benutzt.
Im MU ist ein Attribut, welcher dieses MU einer Gruppe "Attr-Group" zuordnen hinterlegt.
Die Palette auf die es umgelagert wird, hat einen feste maximale Ladungsgröße im Attribut "Attr_Place". Dieser Wert wird runtergezählt.
Die Routine ist eine While -> For -Schleife in der geprüft wird, wie viel Platz noch frei ist. Das Gewicht von MU ist in der Tabelle (T_control) hinterlegt. Auf die Tabelle greift diese Methode zu.
Wenn voll oder ist nichts passendes an Teilen mehr da, dann fährt die Palette weiter.
Damit die Palette nicht von alleine umlagert (in diesem Lösungsansatz wird auf eine Station gepackt), ist eine leere Buck-Ausgangssteuerung hinterlegt. vG
Nadin
------------------
Die einfachste Art an korrekte Informationen zu gelangen ist, etwas Falsches in ein Forum zu posten und auf die Korrektur zu warten. (Matthew Austern) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
| Anzeige.:
Anzeige: (Infos zum Werbeplatz >>)
 |

 Foren auf CAD.de
Foren auf CAD.de



 |
|