Hallo zusammen,
ich bin leider absoluter Anfänger in diesem Programm. Für ein Uniprojekt soll eine virtuelle Fabrik aufgebaut werden.
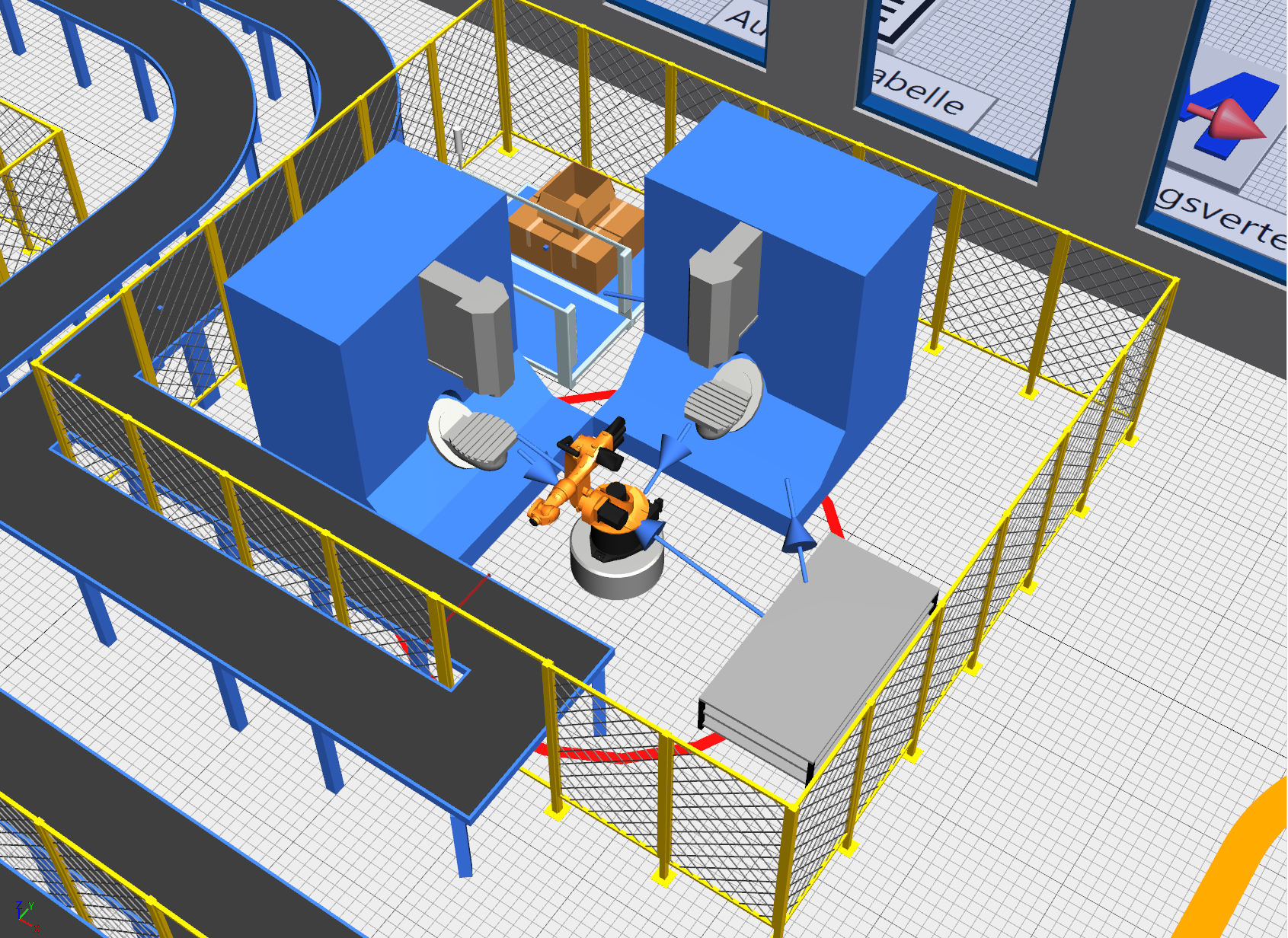
Das Grundsystem dieser Fabrik mit Förderstrecke etc. steht schon. Bei der ersten Station soll ein Pick and Place Roboter von zwei Montagestationen jeweils ein Teil auf eine Palette legen s. Bild 1.
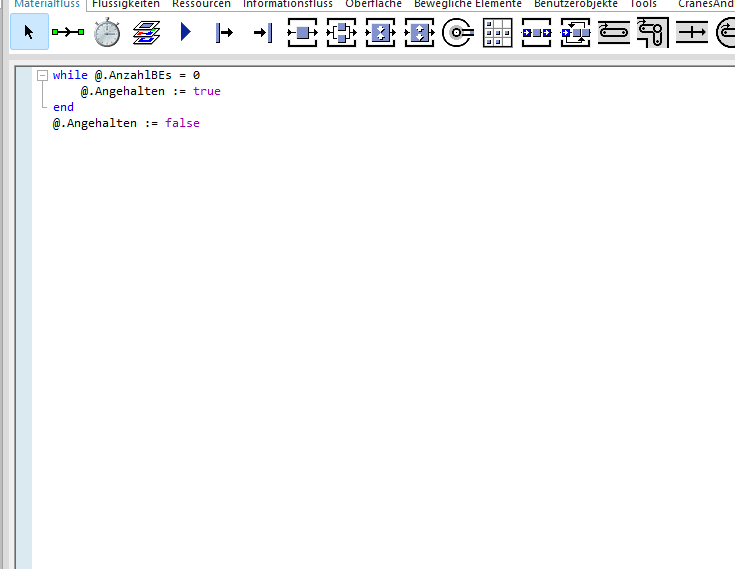
Eine Palette bietet Platz für 8 unterschiedliche Teile, jedoch soll die Palette nicht mit 8 befüllt werden, sondern nach einem Teil zur nächsten Station weiterfahren. Hierfür wollte ich eine Methode schreiben, die leider nicht funktioniert s. Bild 2. 
Leider weiß ich nicht, welches Attribut/ Befehlsfunktion ich benutzten muss, damit die Palette am Sensor anhält, der Roboter ein Teil auflädt und dann die Palette von sich aus weiterfährt. 
Es wäre mega lieb, wenn mir hier jemand weiterhelfen kann
Vielen lieben Dank schonmal
------------------
Andre
[Diese Nachricht wurde von HungirigerHugo am 09. Jun. 2022 editiert.]
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|