|
Autor
|
Thema: PickandPlace Roboter Liste (2533 mal gelesen)
|
dietzmxi
Mitglied
Student

   Beiträge: 17
Registriert: 03.06.2013 Version 10.1
|

 erstellt am: 03. Jun. 2013 16:48
erstellt am: 03. Jun. 2013 16:48  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo Zusammen,
ich habe einen Pick and Place Roboter eine Montagestation und mehrer vorgelagerte Puffer.
Leider finde ich nicht wie ich einen festen Ablauf eines P&P selbst programmieren kann.
d.h. Konkret
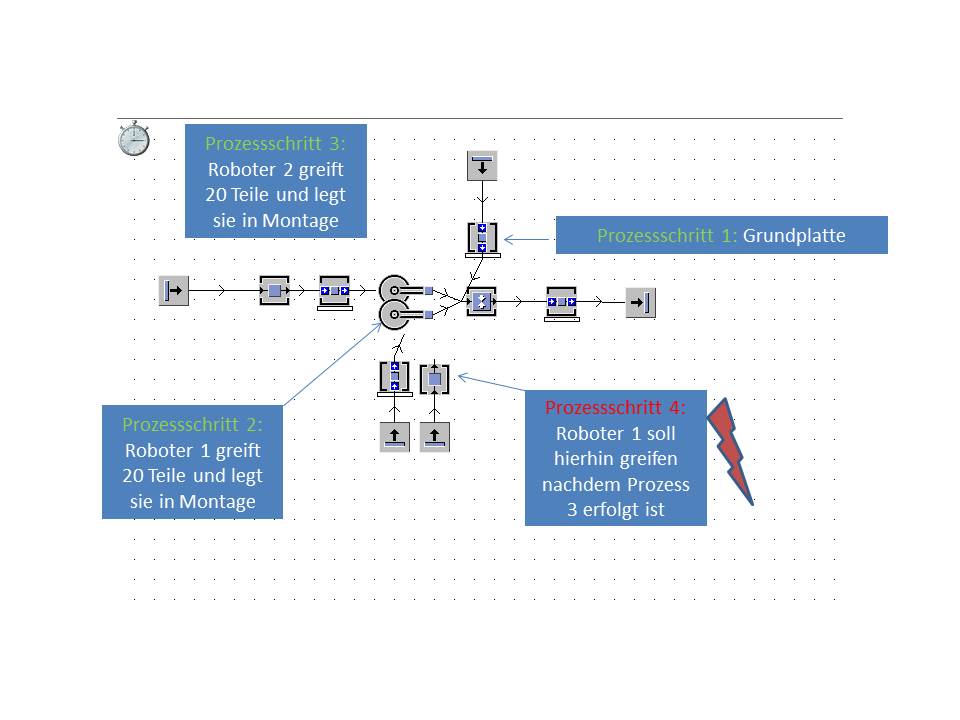
1.: Roboter fährt Puffer 1 an -> holt Objekt -> befördert es zur Montagestation (Vorgang 20x)
2.: Roboter fährt Puffer 2 an -> holt Objekt -> befördert es zur Montagestation (Vorgang 20x) Über die Hilfe im Teamcenter kann ich nur "setzeZiel" finden und im Buch von Bangsow (Auflage 10) finde ich keinen Methode über die der Ablauf programmierbar ist. Danke
Gruß Max Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Bon Simul
Mitglied
Simulant
Beiträge: 1250
Registriert: 08.08.2011 Plant Simulation 10.1, 11 ff Professional
|
erstellt am: 03. Jun. 2013 19:42 <-- editieren / zitieren --> Unities abgeben: Nur für dietzmxi 
|
dietzmxi
Mitglied
Student
Beiträge: 17
Registriert: 03.06.2013 Version 10.1
|
erstellt am: 03. Jun. 2013 20:05 <-- editieren / zitieren --> Unities abgeben:
|
Bon Simul
Mitglied
Simulant
Beiträge: 1250
Registriert: 08.08.2011 Plant Simulation 10.1, 11 ff Professional
|
erstellt am: 03. Jun. 2013 20:15 <-- editieren / zitieren --> Unities abgeben: Nur für dietzmxi
Der PickAndPlace-Roboter transportiert, wenn er im Eingang ein Teil hat und der Nachfolger aufnahmebereit ist. Die Verfügbarkeit (Reihenfolge) der Teile können Sie über die Sperrung der Ausgänge der Vorgänger regeln. Sie könnten zu dem Zweck eine übergeordnete Steuerung schreiben, die die Anzahl der Teile überwacht, den Ausgang eines Puffers sperrt und den nächsten freigibt.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
dietzmxi
Mitglied
Student
Beiträge: 17
Registriert: 03.06.2013 Version 10.1
|
erstellt am: 27. Jun. 2013 20:35 <-- editieren / zitieren --> Unities abgeben:
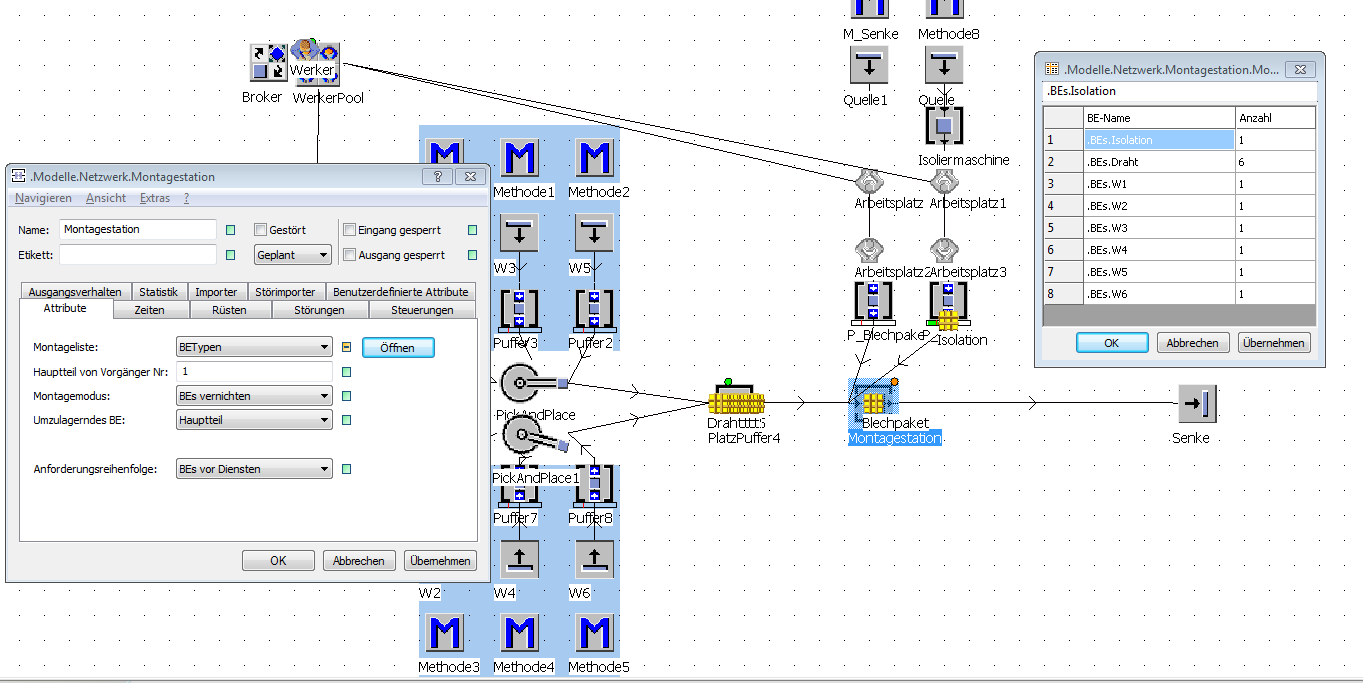
Stimmt, habe den P&P Roboter jetzt über die Ausgänge gesteuert. Jetzt habe ich aber leider das Problem das meine Montagestation die verschiedenen "BEs" nicht verarbeiten will. Sie liegen alle auf einem Puffer vor der Montagestation bereicht und werden nicht verarbeitet. Die Liste der Montagestation ist korrekt. Was habe ich falsch gemacht? Danke Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Bon Simul
Mitglied
Simulant
Beiträge: 1250
Registriert: 08.08.2011 Plant Simulation 10.1, 11 ff Professional
|
erstellt am: 30. Jun. 2013 22:35 <-- editieren / zitieren --> Unities abgeben: Nur für dietzmxi
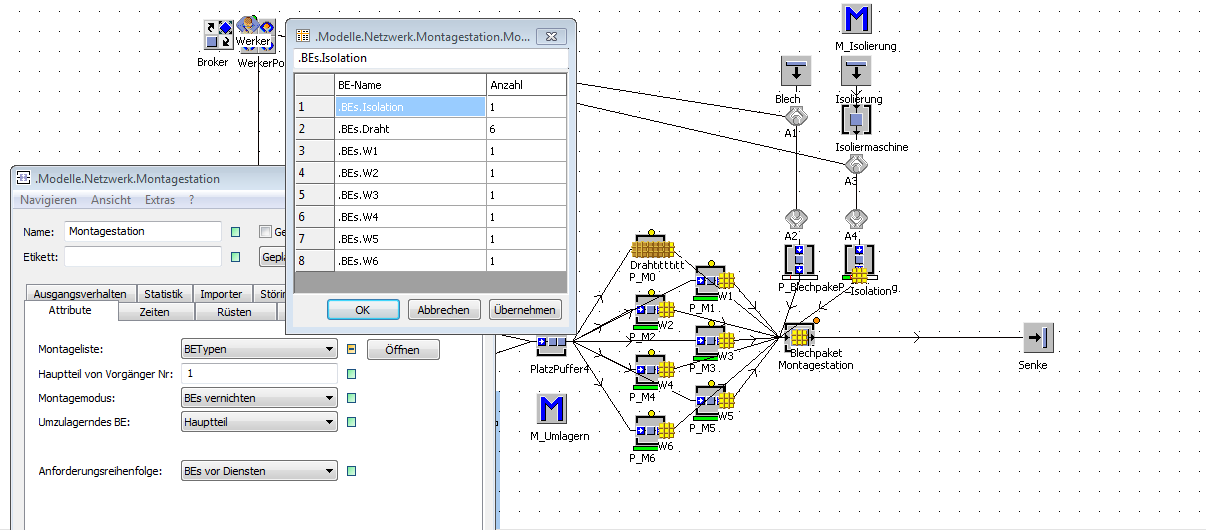
Wenn Sie die Montagestation mit dieser Montageliste verwenden, müssen Sie für jeden BE-Typ einen eigenen Eingang besitzen (Puffer mit Kante). Sie können alle diese Puffer im Pick-And Place-Roboter an der selben Position anlegen, Sie brauchen aber auf alle Fälle je BE-Typ eine Kante zur Montagestation. Eine andere Möglichkeit ist, alle Anbauteile über einen Vorgänger zuzuführen, dann müssten Sie allerdings eine andere Montageliste verwenden (Vorgänger). Sie müssen aber auch hier Hauptteil und Anbauteile über separate Vorgänger zuführen. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
dietzmxi
Mitglied
Student
Beiträge: 17
Registriert: 03.06.2013 Version 10.1
|
erstellt am: 01. Jul. 2013 19:45 <-- editieren / zitieren --> Unities abgeben:
|
dietzmxi
Mitglied
Student
Beiträge: 17
Registriert: 03.06.2013 Version 10.1
|
erstellt am: 03. Jul. 2013 11:28 <-- editieren / zitieren --> Unities abgeben:
|

| | CAD-Konstrukteur/in (Technisches Zeichnen) (m/w/d) | Die Woelcke GmbH & Co. KG ist ein etabliertes mittelständisches Unternehmen im Fahrzeugbau und spezialisiert auf den Bau hochwertiger Reise- und Expeditionsmobile. Mit hoher Fertigungstiefe entstehen bei uns individuelle Fahrzeuge, die durch Qualität, Funktionalität und Liebe zum Detail überzeugen. Für unser Konstruktionsteam suchen wir eine/n CAD-Konstrukteur/in bzw. Technische/n Zeichner/in (m/w/d), der/die den kompletten Innenausbau unserer Fahrzeuge mitgestaltet.... | | Anzeige ansehen | Feste Anstellung |
|
dietzmxi
Mitglied
Student
Beiträge: 17
Registriert: 03.06.2013 Version 10.1
|
erstellt am: 03. Jul. 2013 11:41 <-- editieren / zitieren --> Unities abgeben:
|

 Foren auf CAD.de
Foren auf CAD.de



 |
|