Hallo.
Auf Grund meiner mangelnden Erfahrung benötige ich erneut Hilfe, zur Lösung eines Problems.
Ich habe mich schon durch einige Beiträge gelesen, aber die Lösung habe ich dadruch leider nicht finden können.
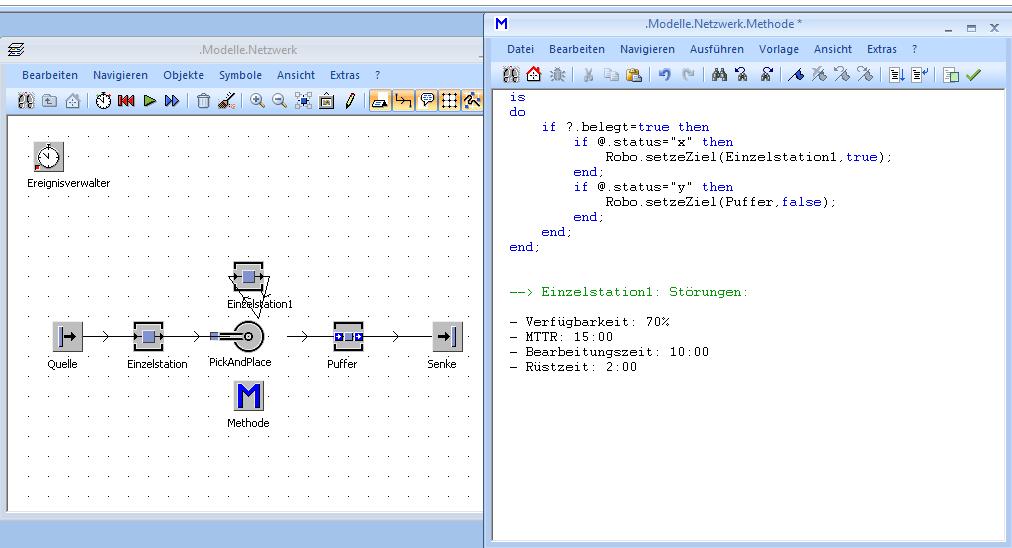
Mein Roboter soll das BE von der Einzelstation aufnehmen und auf die Einzelstation1 umlagern.
Danach soll der Roboter so lange warten, bis das BE bearbeitet worden ist und es anschließend in den Puffer legen. Dieser Schritt soll dann beliebig oft wiederholbar sein.
Mein Lösungsansatz war der, dass ich das BE mit Attributen versehe.
"x" steht dann für den unbearbeiteten Status und "y" für den bearbeiteten Status.
Bei der Umsetzung hapert es aber, da ich nicht genau weis, wie ich das Attribut des BEs von "x" auf "y" umswitchen lasse?!
Viele Grüße
Highairman
Vielen Dank im voraus, an alle die sich die Zeit dafür nehmen, um mir bei diesem Problem zu helfen.
Das Ersatzmodell meines Problems: www.workupload.com/file/Z7hzsm
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|