|
Autor
|
Thema: 3D BE an Roboter anhängen (1092 mal gelesen)
|
sim3dvis
Mitglied

   Beiträge: 10
Registriert: 15.03.2007
|

 erstellt am: 22. Mrz. 2007 08:34
erstellt am: 22. Mrz. 2007 08:34  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Ich habe einen Roboter mit Animationen importiert. Dieser soll auf eine Palette ein BE aufsetzen. Wie schaffe ich es, dass die BE an der Spitze des Roboters angehängt wird und dort während der Animation bleibt? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 22. Mrz. 2007 12:39 <-- editieren / zitieren -->
schau Dir hierzu mal das Thema zu MUleave MUenter und wie es im Demomodell 3drobot.spp angewendet wurde. ------------------
Der Simulator |
sim3dvis
Mitglied
Beiträge: 10
Registriert: 15.03.2007
|
erstellt am: 22. Mrz. 2007 13:03 <-- editieren / zitieren --> Unities abgeben:
|
Ex-Mitglied
|
erstellt am: 22. Mrz. 2007 13:16 <-- editieren / zitieren -->
Ueber den Browser (Strg + b im 3d-Fenster) kannst Du Dir die 3d-Attribute anschauen. Das Attribut "event" ist das Attribut, das angepasst werden muss. s. hierzu die Hilfe ------------------
Der Simulator |
sim3dvis
Mitglied
Beiträge: 10
Registriert: 15.03.2007
|
erstellt am: 22. Mrz. 2007 15:56 <-- editieren / zitieren --> Unities abgeben:
Das Problem ist nicht, die Animation zu starten, dass bekomme ich schon hin. Die Frage ist, wie bekomme ich PS dazu, dass die BE an einem bestimmten Punkt des Roboters hängen bleibt während der Animation. Ich habe dazu in der Hilfe schon das Thema "Einfügeknoten" gelesen, aber irgendwie funktioniert das nicht wirklich. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 22. Mrz. 2007 16:13 <-- editieren / zitieren -->
Was bedeutet "funktioniert nicht wirklich" ? selektiere mal das event-Attribut und druecke die rechte Maustaste. Schau Dir an, was beim Roboter unter Relations eingetragen steht: ein Pfad bis zur letzten Achse und eine action vom Typ "Forward_mu" ------------------
Der Simulator |
sim3dvis
Mitglied
Beiträge: 10
Registriert: 15.03.2007
|
erstellt am: 22. Mrz. 2007 16:29 <-- editieren / zitieren --> Unities abgeben:
Ich glaube, wir sprechen nicht vom gleichen Problem. Ich habe keinen Roboter wie in der Beispieldatei, der nochmal in einzelne Viewerobjekte unterteilt ist. Ich habe eine VRML-Animation eines Roboters und da soll an der Spitze die BE angehängt werden und transportiert werden, während sich der Roboter dreht und seinen Arm hebt! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 23. Mrz. 2007 00:36 <-- editieren / zitieren -->
gem. eMPlant-Hilfe: Kopiere einen Grafikknoten vom Typ ViewerIATrafo unter den Achsknoten, der das Teil aufnehmen soll. Diesen neuen Grafikknoten kannst Du zum Einfuegeknoten definieren und entsprechend positionieren (s. auch Thema Pfade). Das funktioniert ! ------------------
Der Simulator |

| | Entwicklungsingenieur Mechanik (m/w/d) - ATEX, IECEx | METTLER TOLEDO ist ein weltweit führender Anbieter von Präzisionsinstrumenten und Dienstleistungen. In Labor-, Prozessanalytik-, Industrie-, Produktinspektions- und Einzelhandelsanwendungen sind wir bekannt für Innovation und Qualität. Unser Vertriebs-und Servicenetzwerk zählt zu den umfangreichsten der Branche. Unsere Produkte werden in mehr als 140 Ländern verkauft, und wir sind unmittelbar in ca.... | | Anzeige ansehen | Feste Anstellung |
|
Ex-Mitglied
|
erstellt am: 24. Mrz. 2007 16:35 <-- editieren / zitieren -->
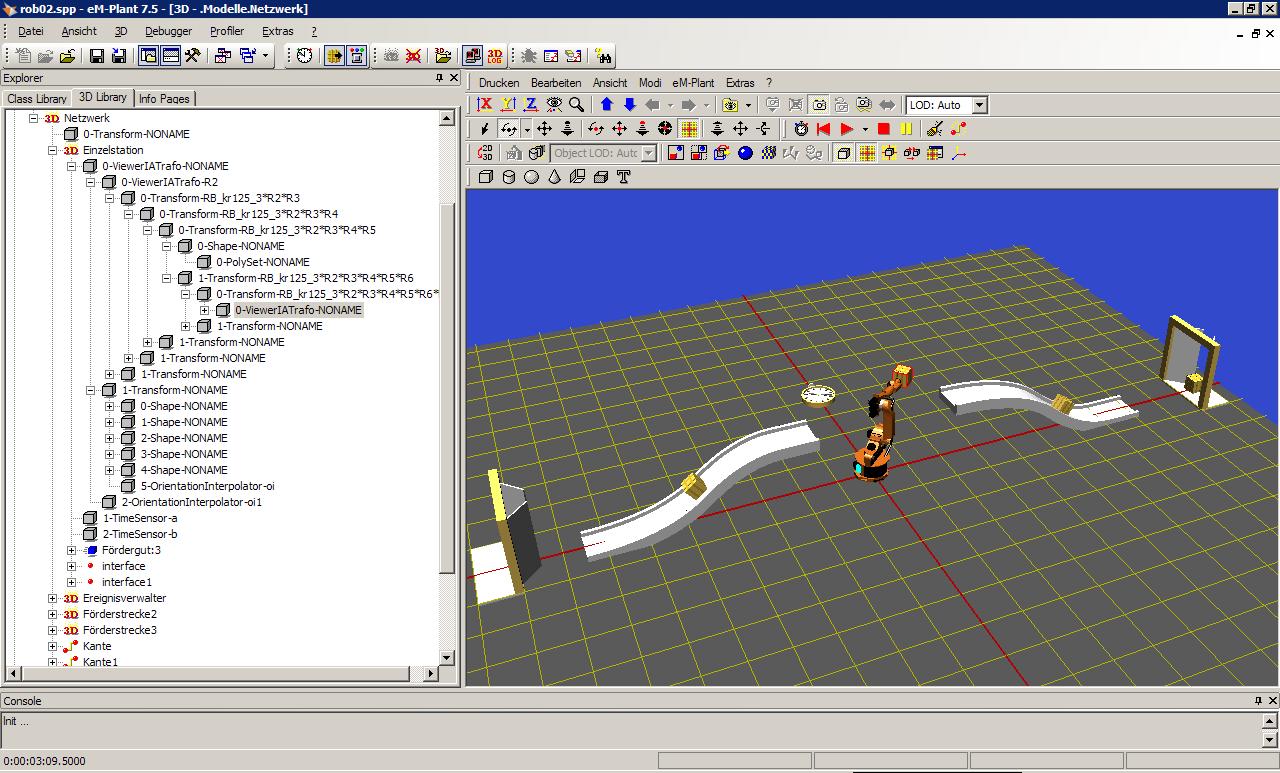
@ sim3dvis "...Ich habe dazu in der Hilfe schon das Thema "Einfügeknoten" gelesen, aber irgendwie funktioniert das nicht wirklich..." So gehts (gem. Hilfe) Der im Bild selektierte Knoten, wurde als Einfuegeknoten definiert.
------------------
Der Simulator |

 Foren auf CAD.de
Foren auf CAD.de



 |
|