|
Autor
|
Thema: Handlingsroboter (967 mal gelesen)
|
DFault
Mitglied

   Beiträge: 123
Registriert: 19.10.2005
|

 erstellt am: 15. Nov. 2005 16:09
erstellt am: 15. Nov. 2005 16:09  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
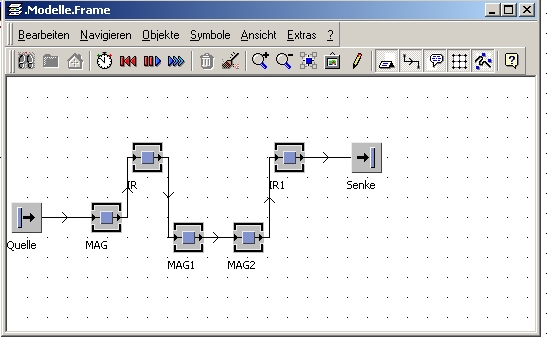
Hallo zusammen, habe derzeit ein Problem mit einem Handlingsroboter. Der Roboter nimmt aus Station "MAG" ein Teil und legt es in Station "MAG1" ein. Station "MAG1" übergibt das Teil an "MAG2".
Ist das Teil fertig bearbeitet, nimmt der Roboter das Teil aus "MAG2" und übergibt es der Senke. Der Roboter muss also mehrere Handlingsarbeiten übernehmen.
Ich habe mir jetzt beholfen, in dem ich den Roboter mit zwei Einzelstationen abgebildet habe (IR und IR1). Wie stelle ich jetzt am elegantesten sicher, dass nur ein Teil entweder in IR oder IR1 ist?
Danke schon mal.
------------------
Um im Leben wirklich Erfolg zu haben, muss man sich fest an zwei Regeln halten: 1. Erzhäl' nicht alles was Du weißt! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Werker
Mitglied
Beiträge: 64
Registriert: 14.11.2005
|
erstellt am: 15. Nov. 2005 16:59 <-- editieren / zitieren --> Unities abgeben: Nur für DFault 
|
DFault
Mitglied
Beiträge: 123
Registriert: 19.10.2005
|
erstellt am: 16. Nov. 2005 09:00 <-- editieren / zitieren --> Unities abgeben:
Hi Werker, danke erst mal. Dann habe ich aber immer noch das Problem den Roboter zwei mal abbilden zu müssen (weil er ja zwei Handlingsvorgänge abdeckt). Dann muss jedoch sichergestellt werden, dass nicht gleichzeitig in beiden Bausteinen ein BE ist. Wenn wir beim Materialfluss bleiben, dann darf z.B. in Station "IR" KEIN Teil sein, wenn in Station "IR1" ein Teil ist und umgekehrt.
Ebenso darf in "IR" kein Teil sein, wenn in Station "MAG2" ein Teil ist, denn das muss der Roboter (IR1) erst an die Senke übergeben. ------------------
Um im Leben wirklich Erfolg zu haben, muss man sich fest an zwei Regeln halten: 1. Erzhäl' nicht alles was Du weißt! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 16. Nov. 2005 18:35 <-- editieren / zitieren -->
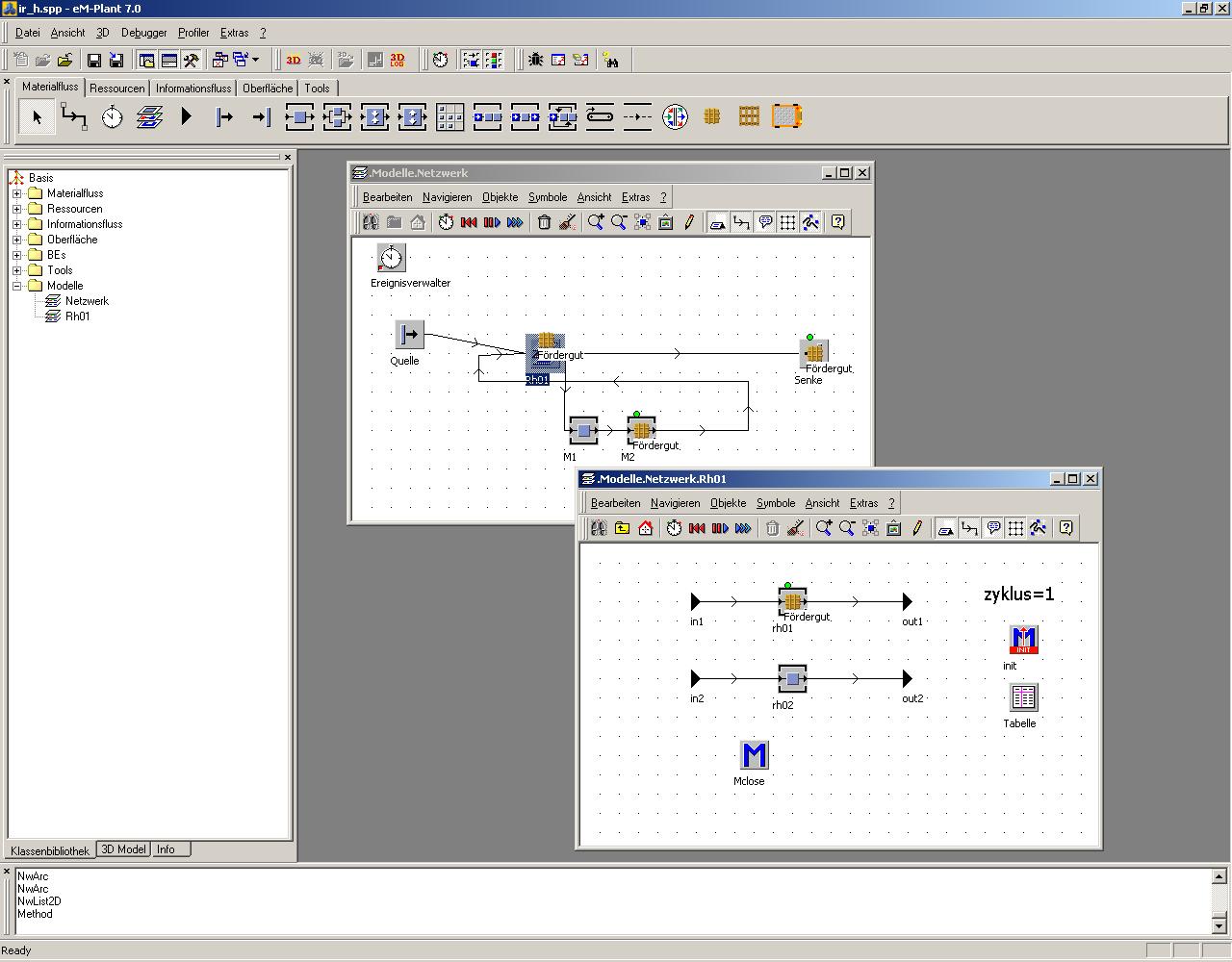
Hi, anbei ein Lösungsvorschlag. Gruss ------------------
DER SIMULATOR  |
DFault
Mitglied
Beiträge: 123
Registriert: 19.10.2005
|
erstellt am: 17. Nov. 2005 09:11 <-- editieren / zitieren --> Unities abgeben:
Na ja, wie immer bombastisch! Genau so hatte ich mir das vorgestellt. Verrat mir doch bitte noch kurz, was die Init-Methode innerhalb des Robi-Netzwerkes bewirkt. Vielen, vielen Dank bis hierher! ------------------
Um im Leben wirklich Erfolg zu haben, muss man sich fest an zwei Regeln halten: 1. Erzhäl' nicht alles was Du weißt! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
toyanap
Mitglied
Student
Beiträge: 1
Registriert: 17.07.2006
|
erstellt am: 17. Jul. 2006 16:16 <-- editieren / zitieren --> Unities abgeben: Nur für DFault
Hi, wie kann man diesen Roboter (das Netzwerk) im 3D Viewer simulieren. Ich habe die 3D Kanals der zwei Einzelstationen "R01" und "R02" gelöscht. Somit erscheint im 3D Viewer nur die Standardgrafik (einen grauen Würfel) des Netzwerks. Ich habe den Würfel gelöscht und zwei Animationen eines Roboters, die ich im 3ds Max erstellt habe, importiert. Wie kann ich die entsprechende Animation starten, wenn ein BE auf eine der Einzelstationen "R01" bzw. "R02" umlagert? Danke! P.S. Ich arbeite mit eM-Plant 7.5.1 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

| | Praktikant*in Design Studio Engineering Interieur & Bedien- und Anzeigekomponenten | Life is always about becoming? Im Leben geht es darum, sich auf eine Reise zu begeben, um die beste Version unseres zukünftigen Selbst zu werden. Während wir Neues entdecken, stellen wir uns Herausforderungen, meistern sie und wachsen über uns hinaus.
Bewerben Sie sich bei Mercedes-Benz und finden Sie den Aufgabenbereich, in dem Sie Ihre Talente individuell entfalten können. Dabei werden Sie von visionären Kolleginnen und Kollegen unterstützt, die Ihren Pioniergeist teilen.... | | Anzeige ansehen | Praktikum |
|
Ex-Mitglied
|
erstellt am: 17. Jul. 2006 16:52 <-- editieren / zitieren -->
hast Du schon das Kapitel "Animation starten, wenn ein BE auf das Objekt umlagert" gelesen bzw Dir den Demo-Roboter in dem "Examples"-Verzeichnis angeschaut ? Gruss ------------------
Der Simulator |

 Foren auf CAD.de
Foren auf CAD.de



 |
|