Hallo an alle IGRIP-Spezialisten!
Für eine Studienarbeit soll ich eine Bewegungssimulation in IGRIP (eine ca. 8-10 Jahre alte Version 5.0 auf einer SGI) durchführen. Am Institut der Uni kennt sich damit keiner (mehr) aus, mein Wissen beschränkt sich daher auf die Tutorials und Handbücher, und nun bin ich am Ende meines Lateins angelangt.
Ich hoffe, dass jemand von Euch mir bei meinen Anfängerproblemen weiterhelfen kann, auch wenn die Version schon älter ist.
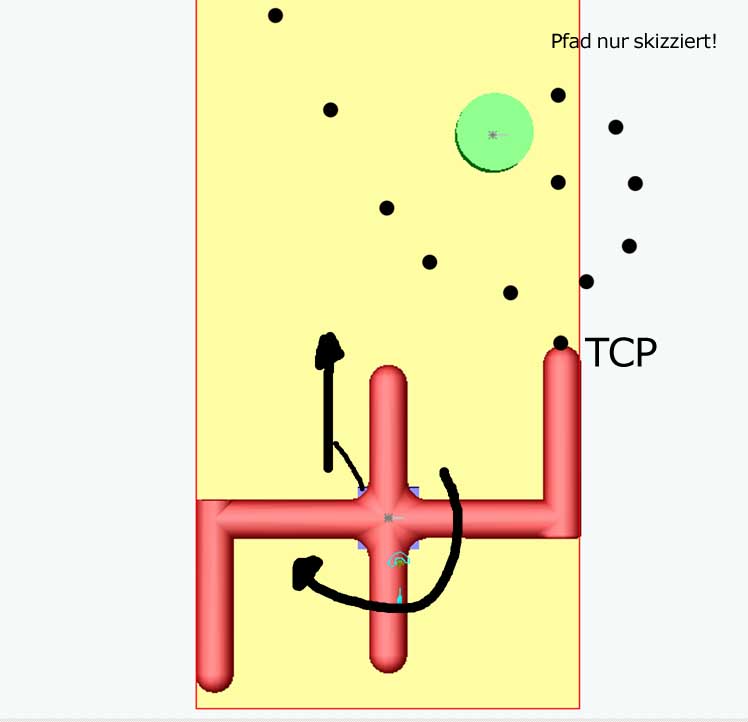
Also hier das Problem (siehe auch Skizze):
Ein Trägerfahrzeug fährt mit konstanter Geschwindigkeit geradeaus. Auf dem Fahrzeug ist an ein um die Hochachse rotierbarer, angetriebener Aufsatz (als einfaches Beispiel z.B. eine zum Boden parallele Scheibe) befestigt. Ein Punkt außen an dem Aufsatz sei der Tool Center Point/Referenzpunkt. Während der konstanten Fahrt des Fahrzeugs soll nun dieser TCP einen bestimmten Pfad abfahren. Die Punkte auf dem Pfad können nur erreicht werden, wenn die Rotationsbewegung auf die translatorische Bewegung abgestimmt wird. Die Rotation soll ohne Bewegungsumkehr erfolgen also immer in eine Richtung drehen.
Ich möchte letztendlich also den Verlauf der Winkelgeschwindigkeit/-Beschleunigung für den Antrieb des rotierenden Aufsatzes bestimmen, um den Motor und später auch die Steuerung auszulegen.
Das Fahrzeug habe ich durch ein Device (einfach ein Block mit einem Freiheitsgrad in Y-Richtung) abgebildet, den Aufsatz durch ein zweites Device bestehend aus einer Basis und dem um die Hochachse(Z) rotierbaren Aufsatz mit TCP am Ende. Das zweite Device habe ich dann auf das erste gesetzt.
Durch separate, manuelle Bewegung der Joints der beiden Devices habe ich dann Schritt für Schritt den gewünschten Pfad erstellt, indem ich am TCP für die einzelnen Stellungen immer einen neuen Tag Point erstellt habe. Somit können die Punkte des Pfades auf jeden Fall erreicht werden.
Die Kinematik des ersten Device (Fahrzeug) habe ich auf Move by Joints gesetzt, das zweite auf Inverse Kinematics. Dabei habe ich die Varianten Generic und Numeric/Arbitrary probiert und bei letzterem auch verschiedene Einstellungen probiert.
Und da fängt dann mein Problem an. Ich weiss nicht, wie ich die beiden Devices programmieren muß. Eigentlich ist die Sache für das erste klar, einfach mit einer bestimmten Geschwindigkeit geradeausfahren. Das klappt auch.
Nur wie kriege ich es hin, dass das zweite Device seine Bewegung auf die des ersten abstimmt, ohne dessen Bewegung zu beeinflussen? Bisher hat nichts richtig funktioniert. Oder muß ich das ganze System als ein Device aufbauen?
Ich würde mich über Hinweise und Vorschläge wirklich sehr freuen, da ich allein einfach nicht mehr weiterkomme. Auch Literaturvorschläge zum Thema wären überaus hilfreich.
Schon mal vielen vielen Dank & Viele Grüße,
Arne
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|