| | |  | Skalierbare und leistungsstarke Enterprise Visualisierungslösung für die Fertigungsindustrie, eine Pressemitteilung
|
|
Autor
|
Thema: Auswertung außerhalb Geometrie (912 / mal gelesen)
|
FlyingRocky
Mitglied
   Beiträge: 2
Registriert: 14.02.2021
|

 erstellt am: 15. Feb. 2021 14:20
erstellt am: 15. Feb. 2021 14:20  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo Forum, ich bin gerade dabei mich in Abaqus einzuarbeiten und stehe nun vor folgendem Problem.
Ich muss Beschleunigungen auswerten, jedoch an einem Punkt, an welchem im Modell keine Geometrie vorhanden ist.
Als Test habe ich hierzu einfach mal einen Ball erstellt, welcher herunterfällt
und habe versucht einen Referenzpunkt, in einigem Abstand zum Ball, zu erzeugen.
Meine Hoffnung war nun, den Referenzpunkt mit dem Ball zu koppeln, so dass dieser die selben Bewegungen ausführt wie der Ball und anschließend die Beschleunigung am Referenzpunkt auszuwerten.
Jedoch hat dies bislang nicht funktioniert.
Beim ersten Versuch, mit kinematic coupling, fiel der Referenzpunkt zwar mit herunter, jedoch lies sich der Ball dann nicht mehr rotieren.
Leider bin ich noch sehr neu in Abaqus und verstehe nicht viel von Kopplungen.
Eventuell gibt es auch eine bessere Herangehensweise als mit Referenzpunkten.
Ich bin für alle Anmerkungen dankbar. Beste Grüße FlyingRocky Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mustaine
Ehrenmitglied V.I.P. h.c.

Beiträge: 3585
Registriert: 04.08.2005 Abaqus
|
erstellt am: 15. Feb. 2021 16:48 <-- editieren / zitieren --> Unities abgeben: Nur für FlyingRocky 
Verformt sie dein Körper während der Simulation? Wenn nein, oder wenn es reicht einen repräsentativen Knoten zu wählen, dann gäbe es diverse Optionen. Wenn ja, dann gäbe es für die Knoten unterschiedliche Beschleunigungen.
Wenn du dann den Mittelwert von vielen Knoten pro Zeitpunkt haben möchtest, würde es kniffliger werden, ginge aber über ein Skript auch. Warum muss der Punkt abseits des Modells liegen? Gibt es eine Rotation die über einen Hebelarm berücksichtigt werden soll? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
FlyingRocky
Mitglied
Beiträge: 2
Registriert: 14.02.2021
|
erstellt am: 15. Feb. 2021 18:40 <-- editieren / zitieren --> Unities abgeben:
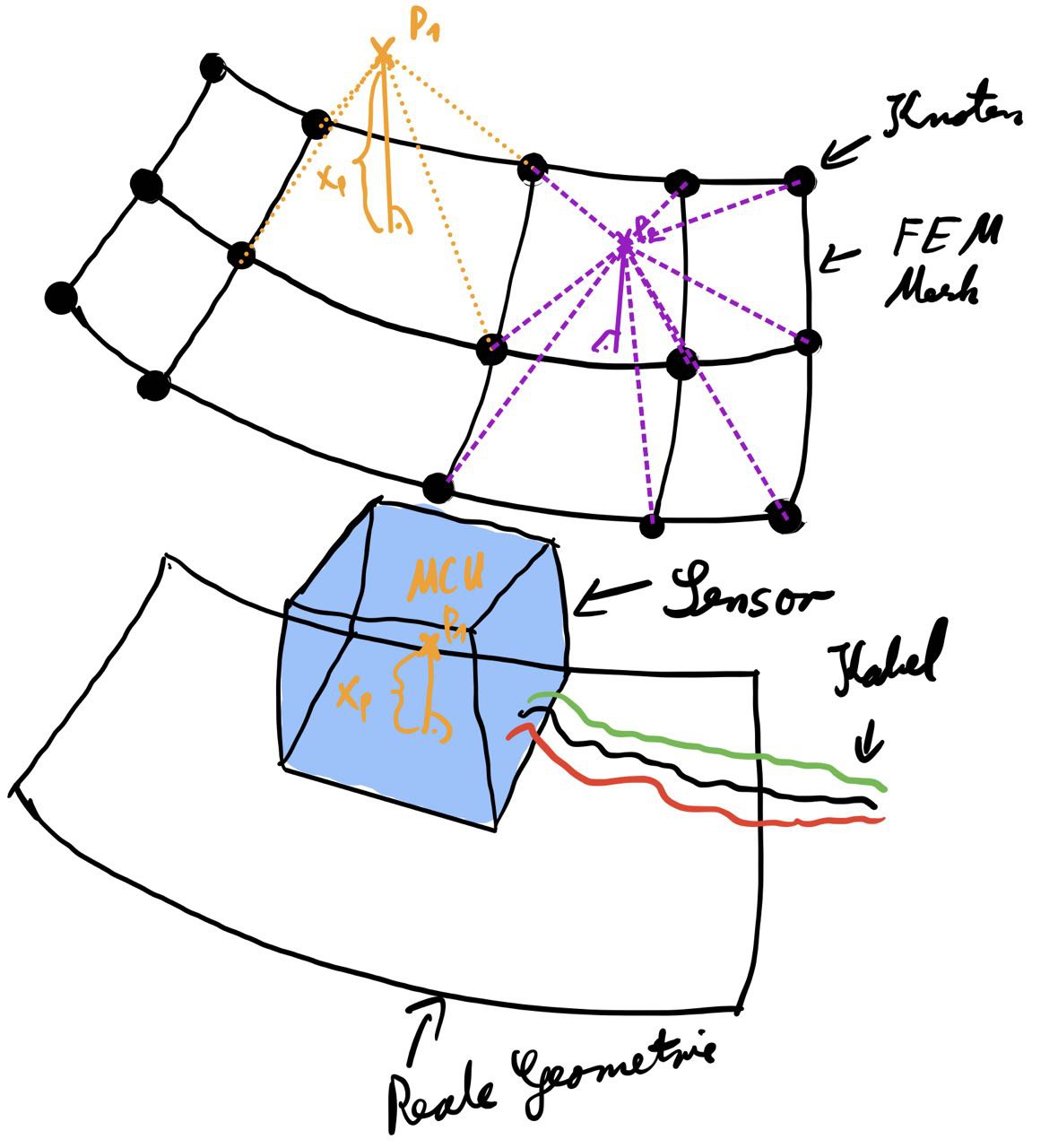
Ja, du hast das schon ganz richtig erkannt. Der Körper wird sich verformen und Abhängigkeiten von mehreren Punkten wären sicher sinnvoll. Bei einem realen Versuch werden Beschleunigungssensoren verwendet, die einen gewissen Abstand zur Geometrie haben, dies würde ich gerne in der Simulation darstellen. Hier ist eine Skizze, zur Demonstration. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mustaine
Ehrenmitglied V.I.P. h.c.
Beiträge: 3585
Registriert: 04.08.2005 Abaqus
|
erstellt am: 16. Feb. 2021 16:55 <-- editieren / zitieren --> Unities abgeben: Nur für FlyingRocky
Tja, dann kommt es noch darauf an, ob der aufgeklebte Sensor eine versteifende Wirkung hat und dies mit simuliert werden soll. Generell platzierst du erstmal einen Referenzknoten an die Stelle wo du ihn haben willst. Punktmasse und Ausgabeanforderungen für diesen Knoten nicht vergessen. Option 1: Du erstellst einen weiteren Knoten auf die projizierten Stelle auf einem Element und klebst (Tie-Constraint) den Knoten auf dieses Element. Dann verbindest du beide Knoten mit einem Beam-Connector, deformierbaren Beam-Elementen, Rigid Body oder Kinematic Coupling. Wie du magst. Option 2: Du koppelst diesen einen Knoten über Federn an mehrere Knoten der Elemente darunter. Die Federsteifigkeit liegt bei dir. Sehr steife Federn versteifen auch die Elemente in gewissem Maße mit. Sehr weiche Federn könnten dazu führen, dass sich der Knoten unabhängig bewegt. [Diese Nachricht wurde von Mustaine am 16. Feb. 2021 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Airfox
Mitglied
Student
Beiträge: 96
Registriert: 16.09.2015
|
erstellt am: 04. Mrz. 2021 16:07 <-- editieren / zitieren --> Unities abgeben: Nur für FlyingRocky
|
| Anzeige.:
Anzeige: (Infos zum Werbeplatz >>)
 |

 Foren auf CAD.de
Foren auf CAD.de



 |
|