Hallo liebe Forengemeinde,
ich hänge momentan in meiner MAsterarbeit beim zyklieren sehr dünner Schalenstrukturen (zylindrisch) fest.
Die Modelle werden dyn. expl. mit S4R-Elementen und einem ganz einfachen elastisch-ideal plastischen Materialgesetzt gerechnet.
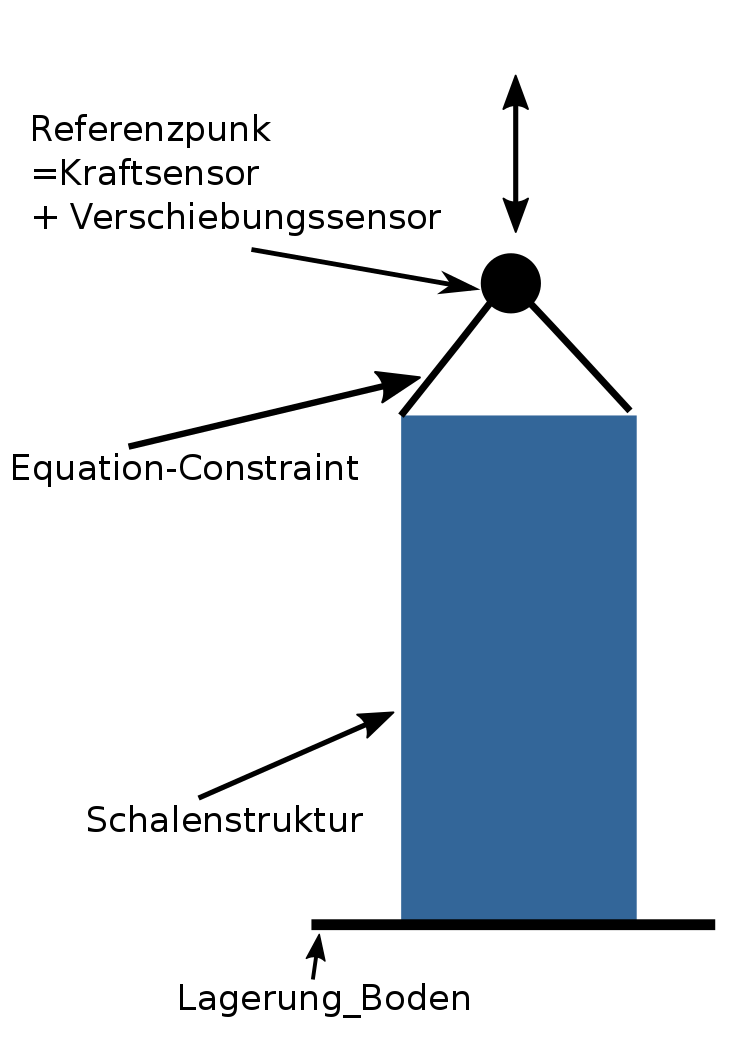
Ich habe mal eine schematische Skizze des Models angefügt.
Die Struktur wird zyklisch deformiert. Dies geschieht über den dargestellten Referenzpunkt und einer Equation-Constraint der oberen Knoten.
Zyklen:
1. Zyklus: Belastung bis 10% Kompression der Ursprungshöhe -> Entlastung bis Kraft an Sensor = 0 ist
2. Zyklus: Belastung bis 20% Kompression der Ursprungshöhe -> Entlastung bis Kraft an Sensor = 0 ist
3. Zyklus: Belastung bis 30% Kompression der Ursprungshöhe -> Entlastung bis Kraft an Sensor = 0 ist
4. Zyklus: Belastung bis 40% Kompression der Ursprungshöhe -> Entlastung bis Kraft an Sensor = 0 ist
5. Zyklus: Belastung bis 50% Kompression der Ursprungshöhe -> Entlastung bis Kraft an Sensor = 0 ist
Die Verschiebungs- bzw. Kraftsteuerung funktioniert über eine VUAMP Subroutine und dem Sensor am Referenzpunkt im Modell.
Die Belastungsschritte werden beim erreichen der eingestellten Kompression abgebrochen.
Die Entlastungsschritte werden abgebrochen sobald die Kraft am Sensor F=0 ist.
Für "dicke" Schalen (t=30mu) funktioniert diese Steuerung einwandfrei. Bei dünneren Schalen (t<=1mu) bekomme ich jedoch massive Probleme.
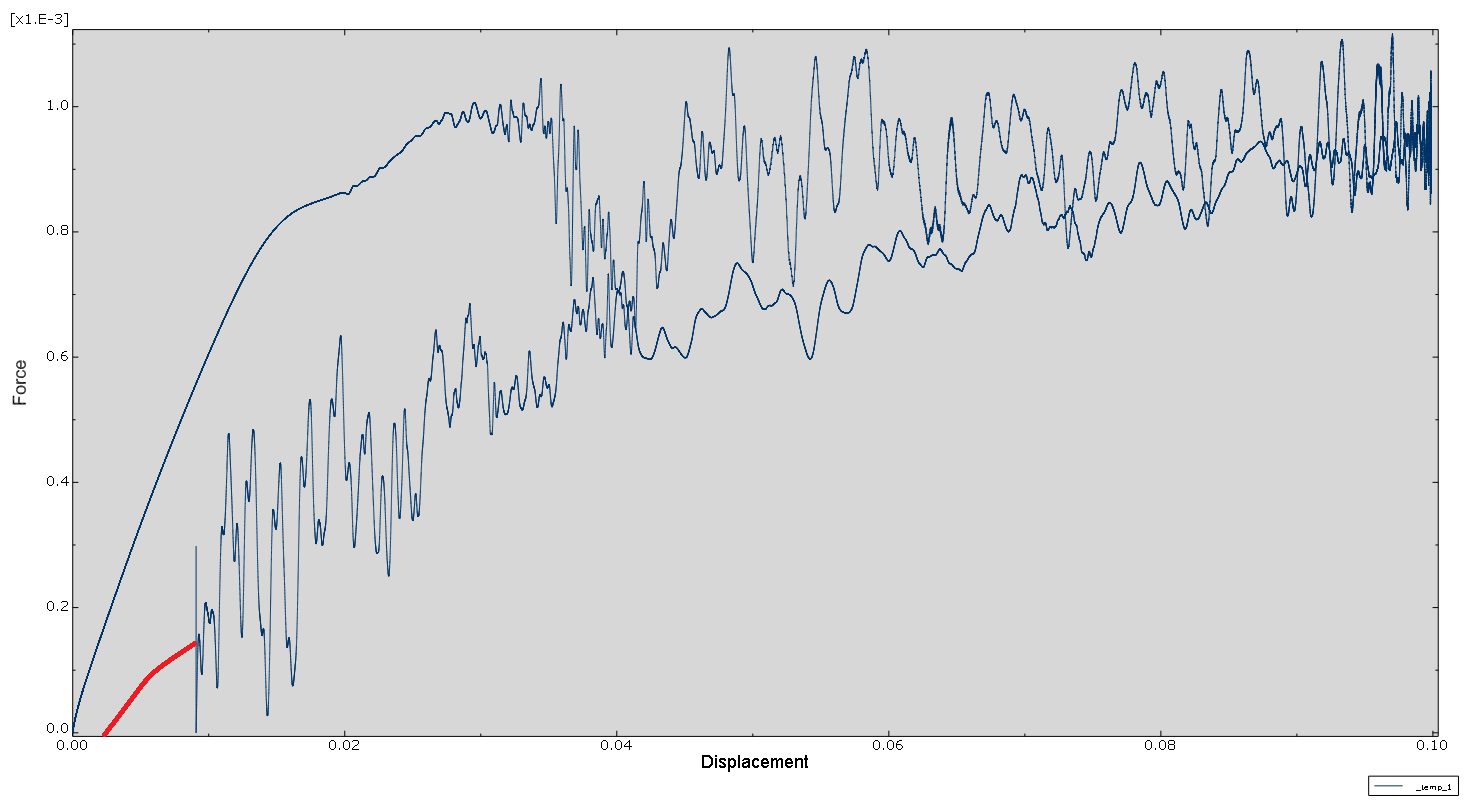
Bei den dünnen Schalen beginnt die vom Sensor aufgenommene Kraft stark zu fluktuieren. Zur Ansicht habe ich eine Kraft-Verschiebungskurve angefügt (1. Be-Entlastungszyklus).
Durch diese starke Fluktuation der Kraft kommt es zu einem vorzeitigen Abbruch der Entlastungsschritte, es wird einmal das Kraftkriterium erfüllt und der Schritt abgebrochen. Tatsächlich sollte die Entlastung noch ein Stück weiterlaufen (Bsp.: roter Pfad in der Kraft-Verschiebungskurve).
Nun zu meiner Frage, ist es irgendwie möglich oder hat jemand eine Idee, wie man bspw. eine Art on-the-fly Filterung der Kraft oder ähnliches realisieren kann.
Ich finde hier keinen praktikablen Ansatz. Bisher habe ich versucht mehrere Werte aufeinander folgende Werte des Kraftsensor in ein .dat-File zu schreiben und
dann daraus einen Mittelwert zu bilden für das Kraftkriterium. Aufgrund der enormen Anzahl der Inkremente verlangsamte dies, vermutlich durch den sich wiederholenden Lese-Schreibzugriff, die Rechnung enorm und brachte auch keinen Erfolg.
Ich muss dazu sagen, dass ich alles andere als ein Fortran-Profi bin.
Ich bin wirklich für jeden TiPP dankbar, ich komme an der Stelle momentan nicht mehr weiter und brauche diese Ergebnisse unbedingt für meine Abschlussarbeit.
Gruß
Rechenknecht87
[Diese Nachricht wurde von Rechenknecht87 am 04. Nov. 2015 editiert.]
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|