| | |
 | KISTERS 3DViewStation ist führende Integrationslösung für Visualisierung in Automobil-Produkt-Konfiguratoren, eine Pressemitteilung
|
|
Autor
|
Thema: Kontaktproblem rigid/analytical rigid (2797 mal gelesen)
|
xaero22
Mitglied
Maschinenbauing.

   Beiträge: 20
Registriert: 01.05.2010
|

 erstellt am: 14. Feb. 2012 10:49
erstellt am: 14. Feb. 2012 10:49  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo, ich versuche im Moment ein Atomic Force Mikroskop zu modellieren. Das ganze funktioniert ähnlich wie ein Plattenspieler, mit einem Cantilever, bei dem auf einem Ende im rechten Winkel eine Nadel angebracht ist. Diese gleitet über ein Substrat und aufgrund der Verschiebungen des Cantilevers kann man dann Rückschlüsse auf die Oberfläche machen. Da die Dimensionen sehr klein sind (Bereich µm bis nm), bin ich gezwungen, um einen halbwegs rechenbaren Zeitschritt zu erreichen, die Nadelspitze als deformable rigid zu definieren.
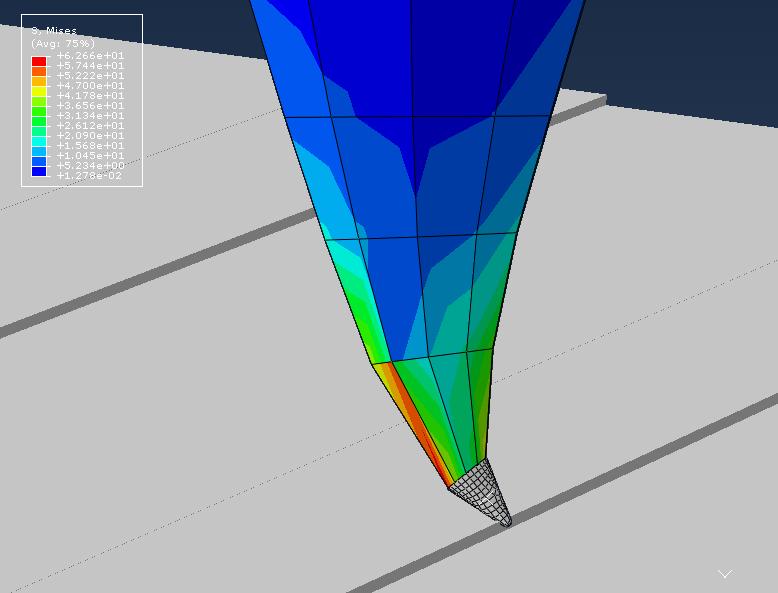
Leider zeigt die Simulation jedoch nicht das Verhalten das ich gerne hätte. Die Spitze sollte quasi reibungsfrei über die Erhöhungen der Oberfläche gleiten und dabei den Cantilever heben und senken. Stattdessen verkeilt sich die Spitze aber bei der Substratoberfläche, wie im angehängten Bild. Der Cantilever ist an den Enden fest eingespannt, und auf das Substrat(analytical rigid) wirkt eine vorgegebene Verschiebung. Als Kontaktbedingung habe ich schon mehrere Sachen versucht. Bei "Hard Contact" bewegt sich die Spitze zwar entlang der Oberfläche, die beiden Körper durchdringen sich aber (habe auch schon 2 Interactions definiert mit vertauschten Master/Slave Surfaces). Bei linearem pressure/overclosure ab einem Wert von ca. 2e5 besteht dieses Problem zwar nicht mehr, allerdings bewegt sich die Spitze auch nicht über die Kante sondern verkeilt sich(wie auf dem Bild) und verbiegt den Cantilever. Bin für jede Hilfe dankbar. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mustaine
Ehrenmitglied V.I.P. h.c.
Beiträge: 3585
Registriert: 04.08.2005 Abaqus
|
erstellt am: 14. Feb. 2012 13:35 <-- editieren / zitieren --> Unities abgeben: Nur für xaero22 
|
xaero22
Mitglied
Maschinenbauing.
Beiträge: 20
Registriert: 01.05.2010
|
erstellt am: 14. Feb. 2012 16:54 <-- editieren / zitieren --> Unities abgeben:
Hallo Mustaine, danke für deinen Tipp.
Das habe ich schon probiert (also analytical rigid=master, deformable rigid=slave). Die Spitze fährt zwar weiter, überträgt auch Kräfte an den Solid-Teil der Spitze, allerdings kommt es zu einer starken Durchdringung beider Körper, bzw. der deformable rigid "versinkt". Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Sherman123
Mitglied
Kunststofftechniker
Beiträge: 181
Registriert: 22.02.2011
|
erstellt am: 15. Feb. 2012 11:44 <-- editieren / zitieren --> Unities abgeben: Nur für xaero22
Mit "Hard" wird das nicht funktionieren. Probier mal eine Non-linear Penalty Kontaktidealisierung. (und stell den 'Abstand-bis-Kraft-Null-wird' (letzter Wert in diesem Menü) auf etwas recht kleines. (z.B. 0.004) Hast du ein Tangential Behavior definiert? (frictionless? proiber auch ein µgleiten von 0.1 - eventuell ist das numerisch stabiler) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
xaero22
Mitglied
Maschinenbauing.
Beiträge: 20
Registriert: 01.05.2010
|
erstellt am: 15. Feb. 2012 13:58 <-- editieren / zitieren --> Unities abgeben:
Hallo Sherman123, meinst du mit "Non-linear-penalty" z.B. "Exponential Pressure-Overclosure"? Das hätte ich jetzt versucht, dann durchdringen sich die Beiden Körper auch (fast) nicht mehr, allerdings kommt es wieder zum Problem, dass die Spitze wie im 2. Bild hängen bleibt. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Sherman123
Mitglied
Kunststofftechniker
Beiträge: 181
Registriert: 22.02.2011
|
erstellt am: 15. Feb. 2012 16:19 <-- editieren / zitieren --> Unities abgeben: Nur für xaero22
Probiers mal so wie auf dem Bild im Anhang. Exponential Pressure Overclosure ist numerisch relativ günstig (softened contact); welche Einstellungen hast du hier gewählt? Wie steilt lässt du die Parabel ansteigen?
Unter Umständen kommst du um eine Kontaktstabilisierung nicht herum. (Achtung: Das verfälscht die Ergebnisse zum Teil beträchtlich)
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
xaero22
Mitglied
Maschinenbauing.
Beiträge: 20
Registriert: 01.05.2010
|
erstellt am: 15. Feb. 2012 20:46 <-- editieren / zitieren --> Unities abgeben:
Hallo, @Sherman123: hab vergessen zu schreiben, dass ich explicit rechne (deswegen auch der Starrkörper um die kleinen Zeitschritte zu vermeiden). Und der non-linear penalty geht ja nur im Standard. Leider hat das pressure-overclosure nix gebracht, die Spitze blieb hängen. Allerdings hat mich dein Vorschlag auf den Gedanken gebracht, das ganze doch mal dynamic implicit zu versuchen und da hat er ohne Probleme mit meinen Pressure-Overclosure und auch mit den von dir empfohlenen Einstellungen durchgerechnet  Jetzt muss ich nur noch herausfinden, ob es wirklich zulässig ist in diesem Fall den impliziten Solver zu nehmen... Danke! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|