| | |
 | KISTERS 3DViewStation-Integrationen für Siemens Teamcenter und Active Workspace sind ab sofort verfügbar, eine Pressemitteilung
|
|
Autor
|
Thema: dynamisch explizit - inertia point mass (3087 mal gelesen)
|
mudjumper
Mitglied
Student

   Beiträge: 15
Registriert: 20.01.2010
|

 erstellt am: 20. Jan. 2010 20:05
erstellt am: 20. Jan. 2010 20:05  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo erstmal, also ich bin noch relativ neu im Simulationssektor, da ich noch Student bin. Ich hoffe ihr könnt mir etwas weiterhelfen.
Mein Problem:
Ich möchte eine Lasche (Stahl) rechnen, die bis zum Bruch belastet werden soll. Dazu natürlich Step: dynamisch explizit (hohe Verformungen und Spannungen)
Die Kraft wird mit einem zylindrischen analytischem Rigid eingeleitet. Das Rigid soll einen Sturz mit einer bestimmten Kraft simulieren.
Und da liegt mein Problem:
Ich muss dem Rigid über den Referenzpoint ja eine Masse zuweisen, da dieses translatorisch verschoben wird.
Bisher mache ich das über Interaction->Special->Inertia->Point mass.
Leider weiss ich aber nicht welche Masse ich da nehmen soll. Ein Ansatz von mir war, mittels F=m*a die Masse rauszurechnen (beim Sturz nehme ich mal eine Verzögerung von etwa 20g an): 15 kN / 20 g * 9.81 m/s² = 76.45 kg Gehe ich da richtig in meiner Vermutung?
Kann ich die Masse auch anders als oben erwähnt zuweisen?
Wäre schön, wenn da jemand helfen könnte.
Besten Dank schonmal im Vorraus lg Tom ------------------
Was mich interessiert ist, ob Gott eine Wahl hatte, als er die Erde erschuf. (A. Einstein) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
mudjumper
Mitglied
Student
Beiträge: 15
Registriert: 20.01.2010
|
erstellt am: 20. Jan. 2010 22:57 <-- editieren / zitieren --> Unities abgeben:
ok, hab mal was anderes versucht: das rigid bekommt eine BC->velocity
diese Geschwindigkeit wird aus der Sturzhöhe errechnet.
das Rigid bekommt eine Masse mit Inertia->Point Mass zugewiesen. Die Rechnung läuft super, das Rigid durchdringt meine Lasche.
Das Problem ist jedoch, dass durch den Kontakt die Geschwindigkeit des Rigids nicht verringert wird. Egal welche Geschwindigkeit ich vorgebe - und mag sie noch so klein sein - das Rigid durchdringt die Lasche ohne v-Verlust.
Ich möchte aber eine Art Grenzgeschwindigkeit haben, mit der die Lasche nicht bricht. Dafür müsste aber der Widerstand der Lasche das Rigid abbremsen - tut es aber nicht...  ------------------
Was mich interessiert ist, ob Gott eine Wahl hatte, als er die Erde erschuf. (A. Einstein) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
M.Seidler
Mitglied
Dipl. Ing.
Beiträge: 600
Registriert: 08.01.2007 ABAQUS CAE 6.7-1
Ansys 12.1
Hyper Works 11
|
erstellt am: 20. Jan. 2010 23:32 <-- editieren / zitieren --> Unities abgeben: Nur für mudjumper 
Hallo, mir ist leider immer noch nicht klar, was Dein Ziel ist und mit welchen Hilfsmitteln du es erreichen willst (must). Wie sieht deine Ausgangskonfiguration aus (ein, zwei Bilder wären hilfreich). ------------------
***********************
Gruß Der Markus Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
mudjumper
Mitglied
Student
Beiträge: 15
Registriert: 20.01.2010
|
erstellt am: 21. Jan. 2010 09:36 <-- editieren / zitieren --> Unities abgeben:
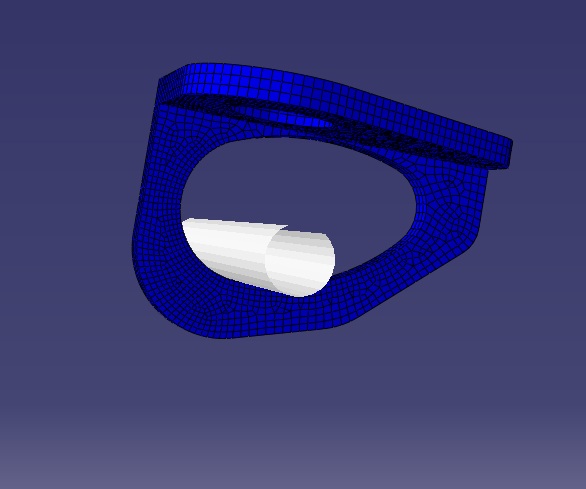
Hallo Markus Hier 2 Bilder:
Im ersten Bild (Start.jpg) sieht man die Lasche, welche mit dem zylindrischen Teil belastet werden soll. Die hier waagrechte obere Fläche ist fixiert.
Der Zylinder soll nun mit einer bestimmten Geschwindigkeit (es geht auch eine Kraft) auf die Lasche treffen - bis diese bricht.
In Bild Lasche_Last ist dies auch zu sehen.
Das Problem ist, dass ich, wenn ich das Rigid mit ner Geschwindigkeit beaufschlage, diese durch den Kontakt mit der Lasche nicht abnimmt - sondern immer auf dem gleichen Wert bleibt. Ich hoffe das Problem ist nun verständlich
Tom ------------------
Was mich interessiert ist, ob Gott eine Wahl hatte, als er die Erde erschuf. (A. Einstein) [Diese Nachricht wurde von mudjumper am 21. Jan. 2010 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
femchen
Mitglied
wiss. MA
Beiträge: 166
Registriert: 25.06.2009
|
erstellt am: 21. Jan. 2010 12:32 <-- editieren / zitieren --> Unities abgeben: Nur für mudjumper
|
M.Seidler
Mitglied
Dipl. Ing.
Beiträge: 600
Registriert: 08.01.2007 ABAQUS CAE 6.7-1
Ansys 12.1
Hyper Works 11
|
erstellt am: 21. Jan. 2010 13:42 <-- editieren / zitieren --> Unities abgeben: Nur für mudjumper
Mudjumper, femchen hat Recht, Du musst die Geschwindigkeit als Initial Condition zuweisen. Wenn Du eine Geschwindigkeit vorgibts, sollte sich dein Starrkörper auch mit dieser bewegen, wenn nicht würde ich mir Sorgen machen. ------------------
***********************
Gruß Der Markus Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
mudjumper
Mitglied
Student
Beiträge: 15
Registriert: 20.01.2010
|
erstellt am: 21. Jan. 2010 13:53 <-- editieren / zitieren --> Unities abgeben:
ja ihr habt recht!!! als BC bewegt sich der Starrkörper mit vorgegebener Geschwindigkeit!
hab ich falsch gemacht!!
Mit Initial condition funktioniert es! Danke euch 2!
lg Tom ------------------
Was mich interessiert ist, ob Gott eine Wahl hatte, als er die Erde erschuf. (A. Einstein) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|