| | |
 | Präzision trifft Flexibilität - die neue SENO Sensorwelle-Duo ist da!, eine Pressemitteilung
|
|
Autor
|
Thema: Kppmoment Roboter (4034 mal gelesen)
|
wuptal
Mitglied
student

   Beiträge: 28
Registriert: 29.07.2009
|

 erstellt am: 21. Jan. 2012 13:05
erstellt am: 21. Jan. 2012 13:05  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
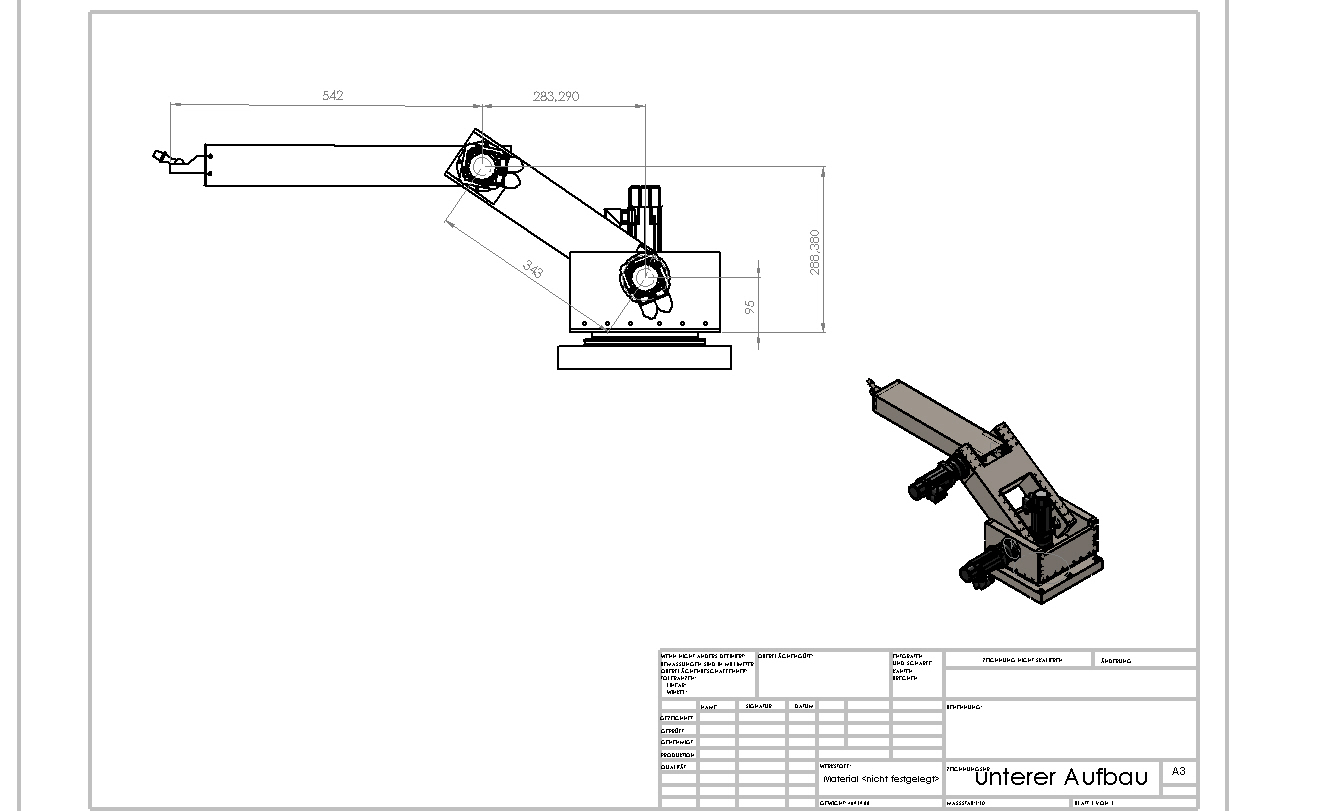
Hallo Leute, ich konstruiere für die Uni einen Roboter.
Ich habe ein "Drehtischlager" gefunden, dieses erlaubt aber nur ein Kippmoment von max 1000Nm.
Nun ist die Frage wie ich es am einfachsten berechne.
Eine Möglihckiet wäre einfach das Moment zu berechnen, wenn die Arme "ausgestreckt" sind.
Doch dabei vergist man ja die Massenträgheit.
Und wenn ich die Massenträgeit berechne stellt sich die Frage we ich die Motoren einbinde. Der Roboter dreht sich um sich selbst. Dort ist ein Arm angebracht der ca. 400mm ang ist Und am Ende der Motor für den zweiten Arm. Dann der letzte Arm ca 350 mm Lang und Am ende kommt ein Gewicht von Max 5 Kg. Kann mir jemand einen Tipp geben? Danke euch!
Gruß Wuptal Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
N.Lesch
Moderator
Dipl. Ing.
    
Beiträge: 5286
Registriert: 05.12.2005 WF 4
|
erstellt am: 21. Jan. 2012 14:11 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal 
Wie du schon erkannt hast, kommt es bei den Robotern auf die Beschneunigung oder Verzögerung an. Eine Beschleunigung läßt sich einfach in eine Kraft
umrechen (F = m * a )
Auch eine Winkelbeschleunigung läßt sich einfach in ein Drehmoment umrechnen. Jetzt mußt Du nur noch die extremste Konstellation aufmalen, damit es verständlicher wird, und dann zusammen zählen. Eventuell wird es einfacher die Winkelbeschleunigungen in lineare umzurechnen. Ich würde von den einzelnen Armen jeweils den Schwerpunkt nehmen. ------------------
Klaus Solid Edge V 20 SP15 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister

Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 21. Jan. 2012 14:38 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
|
wuptal
Mitglied
student
Beiträge: 28
Registriert: 29.07.2009
|
erstellt am: 21. Jan. 2012 14:50 <-- editieren / zitieren --> Unities abgeben:
|
N.Lesch
Moderator
Dipl. Ing.
Beiträge: 5286
Registriert: 05.12.2005 WF 4
|
erstellt am: 21. Jan. 2012 15:19 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
Sind doch nur 2 Arme, ein Motor und die 5 kg für den Greifer. Die inneren 2 Motoren kannst Du für das Drehmoment vergessen. Bei den 2 Armen nimmst du die Masse und Beschleunigung im Schwerpunkt. Fertig.
------------------
Klaus Solid Edge V 20 SP15 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
wuptal
Mitglied
student
Beiträge: 28
Registriert: 29.07.2009
|
erstellt am: 22. Jan. 2012 19:43 <-- editieren / zitieren --> Unities abgeben:
|
N.Lesch
Moderator
Dipl. Ing.
Beiträge: 5286
Registriert: 05.12.2005 WF 4
|
erstellt am: 22. Jan. 2012 19:54 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
"Doch dabei vergist man ja die Massenträgheit" Das genau ist die Beschleunigung oder Verzögerung. Die Robbis machen 5 * g. Das nennt sich Physik der Mechanik, habe ich alles schon vor dem Studium in der Schule gelernt. ------------------
Klaus Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
wuptal
Mitglied
student
Beiträge: 28
Registriert: 29.07.2009
|
erstellt am: 22. Jan. 2012 20:40 <-- editieren / zitieren --> Unities abgeben:
Hallo, ich glaubeich stehe etwas auf dem Schlauch Also rechne ich das Moment aus. M1=F+L
mit
F: Gewichtskraft der Komponente
L: Abstand Massenschwerpunkt und M2=m*a
m: Gewicht der KOmponente
a. maximale Beschleunigung des Motors? Also würde sich die Formel für eine Komponente zusammen setzten zu
Mg=M1+M2 Und dies für jede Komponente und alles addieren? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
N.Lesch
Moderator
Dipl. Ing.
Beiträge: 5286
Registriert: 05.12.2005 WF 4
|
erstellt am: 22. Jan. 2012 21:47 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
Zieh Dir mal den rein. Hast du schon mal einen Roboter in Aktion gesehen ? Die sind sehr schnell. Und weil sie mit Elektromotoren angetrieben werden können sie gewaltig beschleunigen. Die haben ein ordentliches Anlauf-Moment.
Einen E-Motor kann man auch als Generator schalten und damit bremsen. Du kannst das statisch oder dynamisch rechnen. Statisch macht aber wenig Sinn. Dynamisch kannst Du mit Winkelbeschleunigungen oder linearen Beschleunigungen rechnen. Da mußt Du vom Drehmoment oder der Beschleunigung der Motoren ausgehen und das Übersetzungsverhältnis mit einrechnen.
Mit Deinen Vorkenntnissen wird das aber schwer. Ein Moment ergibt sich aus M = F mal l ( nicht plus )
Die Gewichtskraft ist F = m mal g ( m = Masse oder Gewicht, g = Erdbeschleunigung ) Die Masse sagt Dir jedes CAD Programm, wenn Du die Dichte eingibst. Den Schwerpunkt gibt SWX auch aus. ------------------
Klaus Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
wuptal
Mitglied
student
Beiträge: 28
Registriert: 29.07.2009
|
erstellt am: 22. Jan. 2012 23:03 <-- editieren / zitieren --> Unities abgeben:
Ja da ist mir ein fehler unterlaufen. Natürlich mal. Danke für deine Tipps.
Ich werde mir das Buch mal besorgen und drinnen lesen.
Meine Winkelbeschleunigung ist ca. 1,5 *g Also ist für das MOment am ersten Arm:
M=Lm*m*g+Lm*m*1,5g =Lm *2,5*m*g
Liege ich damit falsch? Danke für deine Hilfe
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
chrisman
Mitglied
Dipl.-Ing. Maschinenbau - Konstruktionsleiter
Beiträge: 356
Registriert: 07.07.2011 Inventor 2018
Win7Pro64Bit
Z440 Workstation
|
erstellt am: 10. Mai. 2012 12:08 <-- editieren / zitieren --> Unities abgeben: Nur für wuptal
Grüße dich! Ich würde hier viell. eine dynamische Simulation (beispielsweise im Inventor) erstellen. Sind ja nicht all zu viele Bauteile, da dürfte das relativ schnell gehen. Da kannst du dir dann in jeder Stellung das Kippmoment ausgeben lassen und somit den schlimmsten Fall ermitteln. Trotzdem sollten natürlich die physikalischen Grundlagen verstanden sein. grüße
chris ------------------
Grüße! Chris Dem Ingenieur ist nichts zu schwör! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de