| | |
 | Entdecken Sie starke neue Funktionen mit dem neuen MegaCAD 2026 V1!, eine Pressemitteilung
|
|
Autor
|
Thema: Kinematik Roboter von Start auf endpunkt fahren (2022 / mal gelesen)
|
-eichi-
Mitglied
Konstrukteur / Maschinenbautechniker

   Beiträge: 206
Registriert: 17.03.2015 Win 10
MegaCAD 3D 2022 PP
MegaGENIAL
Cadenas
Hardware:
i7-6700
Nvidia Quadro M2000
32GB RAM
|

 erstellt am: 19. Jan. 2017 16:24
erstellt am: 19. Jan. 2017 16:24  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hi Hab mich mal etwas in die Kinematikfunktion eingearbeitet, jetzt hab ich da mal ne frage : Kann ich wie im bild das graue Bauteil auf die Ablage fahren lassen ohne das ich die ganzen Achswinkel angebe? Das Bauteil soll von start 1 auf ende 1 und von start 2 auf ende 2 platziert werden , d.h es mus sich erst mal um 90° drehen und dan um 55° kippen. die Roboterachsen hab ich alle als Scharnier definiert Ich habs versuch es mit zwei Linearmotoren zu machen (für jede Linie einen Motor) Kann mir da wer weiterhelfen ? Leider ist die Prt zu groß zum hochladen .. EDIT: Habs jetzt extern hochgeladen : Bild https://drive.google.com/open?id=0B_Lo3XU954ImR3NEUEhXWTBWclkPRT: https://drive.google.com/open?id=0B_Lo3XU954ImaHFJVTFIRC1ILXMmfg Eichi Edit : Der upload will irgendwie gar nicht  [Diese Nachricht wurde von -eichi- am 19. Jan. 2017 editiert.] [Diese Nachricht wurde von -eichi- am 19. Jan. 2017 editiert.] [Diese Nachricht wurde von -eichi- am 19. Jan. 2017 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
-eichi-
Mitglied
Konstrukteur / Maschinenbautechniker
Beiträge: 206
Registriert: 17.03.2015 Win 10
MegaCAD 3D 2022 PP
MegaGENIAL
Cadenas
Hardware:
i7-6700
Nvidia Quadro M2000
32GB RAM
|
erstellt am: 06. Dez. 2017 16:15 <-- editieren / zitieren --> Unities abgeben:
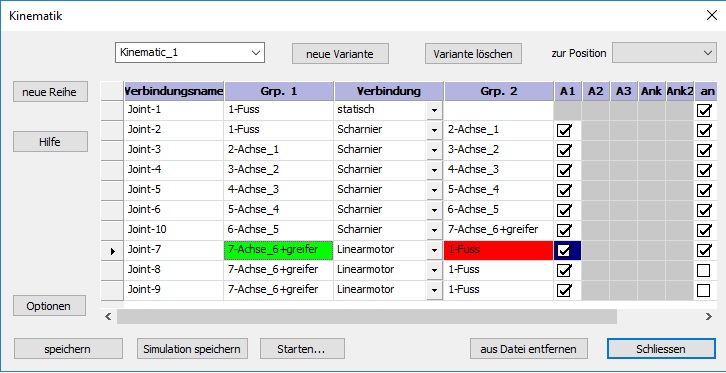
Soo, Hatte erneut eine ähnliche Aufgabenstellung. Hab dann durch den Support von MegaCAD etwas Hilfe Bekommen, Im Anhang hab ich mal die fertige Datei mit Kinematik gelegt. Hilft vielleicht wenn jemand ein ähnliches Problem hat. Hier noch die Erklärung Von Megatech: " das ist ein schönes Beispiel für eine inverse Kinematik. Sie sollten (dürfen) zwischen zwei Elemente allerdings immer nur EINE Verbindung definieren. Ich habe deshalb die Gruppe 7 Achse_6+greifer per Linearmotor mit dem Fuss verbunden - das funktioniert. " Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied

|
 erstellt am: 07. Dez. 2017 08:12
erstellt am: 07. Dez. 2017 08:12
Hallo eichi, ich habe mir die Datei mal heruntergeladen - und versucht, das nachzuvollziehen...bin aber nicht zu sehr in der Kinematik drin...bei mir fährt der Roboter "nur" den ersten "Zylinder" an...bestimmt mache ich was falsch... Frage: könntest du davon ein "AVI"-Video er- und hier einstellen? Geht das aus der Kinematik? Dann könnten das auch alle anschauen, die keine Kinematik haben...oder diese nicht so in der Tiefe einsetzen...  Denn dein Beispiel sieht ja richtig klasse aus...Danke für's Teilen! ------------------
|
Kopfkantenbruch
Mitglied
Konstrukteur
Beiträge: 150
Registriert: 17.12.2008 MegaCAD Profi plus 2014/15
MegaCAD 2014/15 3D + Genial
Nvidia Quadro FX 1500
Spacetraveller
|
erstellt am: 07. Dez. 2017 09:35 <-- editieren / zitieren --> Unities abgeben: Nur für -eichi- 
Hallo Eichi, ich habe gerade kein ProfiPlus zur Verfügung (die Kollegen sind gerade fleißig :-), aber wenn ich Deine Screenshots so anschaue stellt sich mir die Frage wie Du ohne Winkelmotoren auskommst. Wenn Du statt des einen oder anderen Scharniers einen Winkelmotor verwendest (da kann man sich dann mit einer Checkbox auch eine "parallele Verbindung" erstellen lassen), kommst Du glaube ich schon weiter. Ich stelle mir in so einem Fall immer vor was tatsächlich passiert. Steht der Roboterarm auf einem fahrbaren Gestell? Wenn nein, ist der Linearmotor mMn der falsche Ansatz. Rein mit Winkelmotoren realisiert kann es natürlich schwieriger sein die benötigten Winkel auszurechnen... Manchmal hilft es auch einen (winzigen) Hilfkörper zu bewegen, auf dem ein weiterer Antrieb sitzt. Wenn ich nachher an eine ProfiPlus Lizenz komme, gucke ich mir die PRT nochmal an, Deinen Post von Januar habe ich seinerzeit leider nicht wahrgenommen... Gruß Helge Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
-eichi-
Mitglied
Konstrukteur / Maschinenbautechniker
Beiträge: 206
Registriert: 17.03.2015 Win 10
MegaCAD 3D 2022 PP
MegaGENIAL
Cadenas
Hardware:
i7-6700
Nvidia Quadro M2000
32GB RAM
|
erstellt am: 07. Dez. 2017 10:18 <-- editieren / zitieren --> Unities abgeben:
@ NN: dazu musst du jeweils die die anderen Motoren anwählen(letzte Spalte der Kinematik Tabelle , immer nur einen Aktiv schalten), damit er das Dreieck Komplet fährt muss ich noch Ereignisse definieren , soweit bin ich leider noch nicht, Video mach ich wenn ich fertig bin  @Kopfkantenbruch:
Kleiner Denkfehler bei dir , ich will ja keine Achswinkel an den Roboterachsen angeben , die sind mir egal da ich hier nur eine Erreichbarkeitsanalyse machen will,
er soll stur die bahn abfahren und die Achsen Selbst drehen/positionieren. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Kopfkantenbruch
Mitglied
Konstrukteur
Beiträge: 150
Registriert: 17.12.2008 MegaCAD Profi plus 2014/15
MegaCAD 2014/15 3D + Genial
Nvidia Quadro FX 1500
Spacetraveller
|
erstellt am: 08. Dez. 2017 09:34 <-- editieren / zitieren --> Unities abgeben: Nur für -eichi-
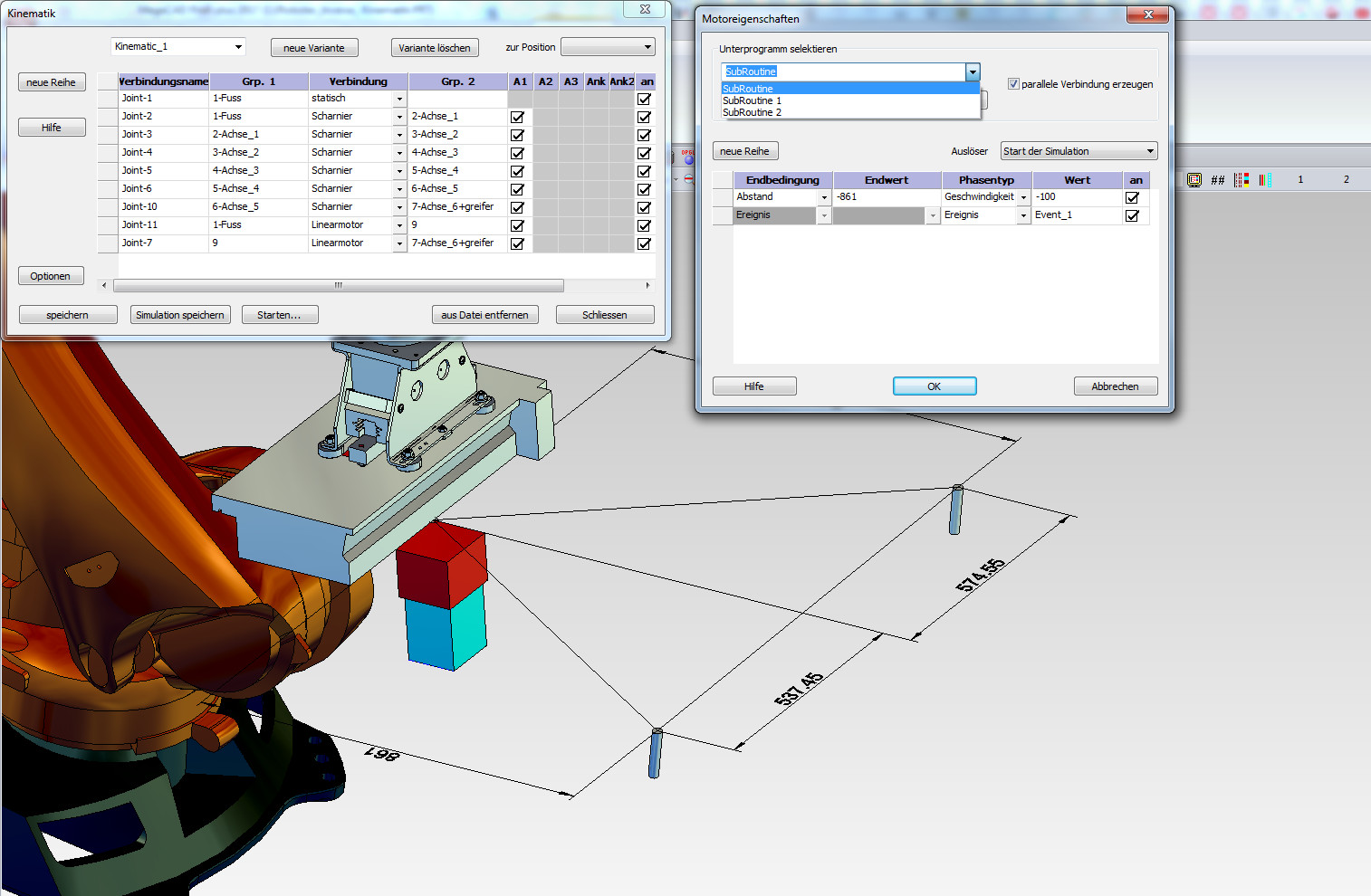
Hallo eichi, heute früh habe ich eine ProfiPlus-Lizenz ergattert :-) Ich habe Deine Datei so bearbeitet, dass das Werkstück die drei Punkte abfährt. Dafür habe ich einen Hilfskörper (hellblau) eingefügt, der mit einem Linearmotor in "x-Richtung" geführt wird. An diesem Hilfskörper habe ich einen Linearmotor angebracht, der das Werkstück in "y-Richtung" führt. Dann habe ich mir die Maße im Modellbereich eingefügt und als Abstände in die Motorparameter eingetragen. Dann habe ich über Events die Bewegungen nacheinander in Subroutinen gesteuert. Die Bewegungen sind etwas eckig, aber wenn man sich die entsprechenden Geschwindigkeiten für x- und y-Richtung ausrechnet, sollte sich das optisch ansprechend gestalten lassen. Außerdem kann man dem Roboter noch einen "Fußboden" spendieren und die Hilfskörper unter dem Fußboden verstecken. Wenn man nun noch den roten Hilfskörper einbindet müsste sich auch noch die z-Achse realisieren lassen, aber dafür fehlt mir jetzt so nebenbei der Ergeiz :-) Ich hoffe, ich konnte helfen. Gruß Helge [Diese Nachricht wurde von Kopfkantenbruch am 08. Dez. 2017 editiert.] [Diese Nachricht wurde von Kopfkantenbruch am 08. Dez. 2017 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Kopfkantenbruch
Mitglied
Konstrukteur
Beiträge: 150
Registriert: 17.12.2008 MegaCAD Profi plus 2014/15
MegaCAD 2014/15 3D + Genial
Nvidia Quadro FX 1500
Spacetraveller
|
erstellt am: 08. Dez. 2017 09:43 <-- editieren / zitieren --> Unities abgeben: Nur für -eichi-
|
-eichi-
Mitglied
Konstrukteur / Maschinenbautechniker
Beiträge: 206
Registriert: 17.03.2015 Win 10
MegaCAD 3D 2022 PP
MegaGENIAL
Cadenas
Hardware:
i7-6700
Nvidia Quadro M2000
32GB RAM
|
 erstellt am: 08. Dez. 2017 09:58 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 08. Dez. 2017 09:58 <-- editieren / zitieren --> Unities abgeben:
hat geklappt  Da muss ich mich erst mal reindenken  Danke für den Lösungsansatz Mein Nächster schritt wäre das ausrichten des Körpers auf eine Ablage die Schräg im Raum steht , wenn ich das Hinkrieg brauch ich kein RoboCAD   Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Kopfkantenbruch
Mitglied
Konstrukteur
Beiträge: 150
Registriert: 17.12.2008 MegaCAD Profi plus 2014/15
MegaCAD 2014/15 3D + Genial
Nvidia Quadro FX 1500
Spacetraveller
|
erstellt am: 13. Dez. 2017 15:39 <-- editieren / zitieren --> Unities abgeben: Nur für -eichi-
|
-eichi-
Mitglied
Konstrukteur / Maschinenbautechniker
Beiträge: 206
Registriert: 17.03.2015 Win 10
MegaCAD 3D 2022 PP
MegaGENIAL
Cadenas
Hardware:
i7-6700
Nvidia Quadro M2000
32GB RAM
|
erstellt am: 13. Dez. 2017 16:17 <-- editieren / zitieren --> Unities abgeben:
|

 Foren auf CAD.de
Foren auf CAD.de



 |
|