Hallo zusammen,
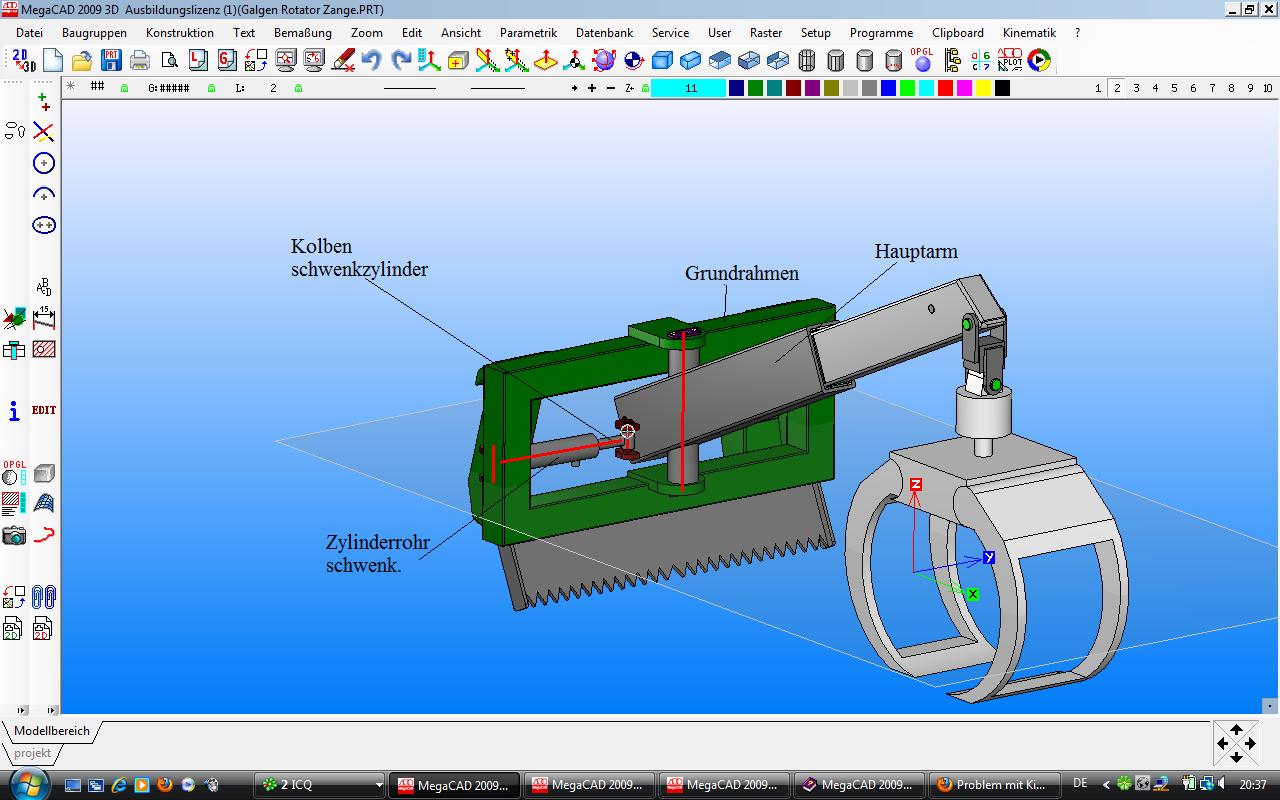
ich hab mal wieder ein Problem, und zwar mit der Kinematik. Auf den Screenshots seht ihr worum es geht. Habe eine Forstzange konstruiert, deren Hauptarm sich, über den Schwenkzylinder, um 44° in jede Richtung schwenken lässt. Ich bekomme es aber einfach nicht hin, das dieser (sche...) Schwenkzylinder richtig ein und ausfährt( und Gleichzeitig um die kleinen Rotationsachsen schwenkt)
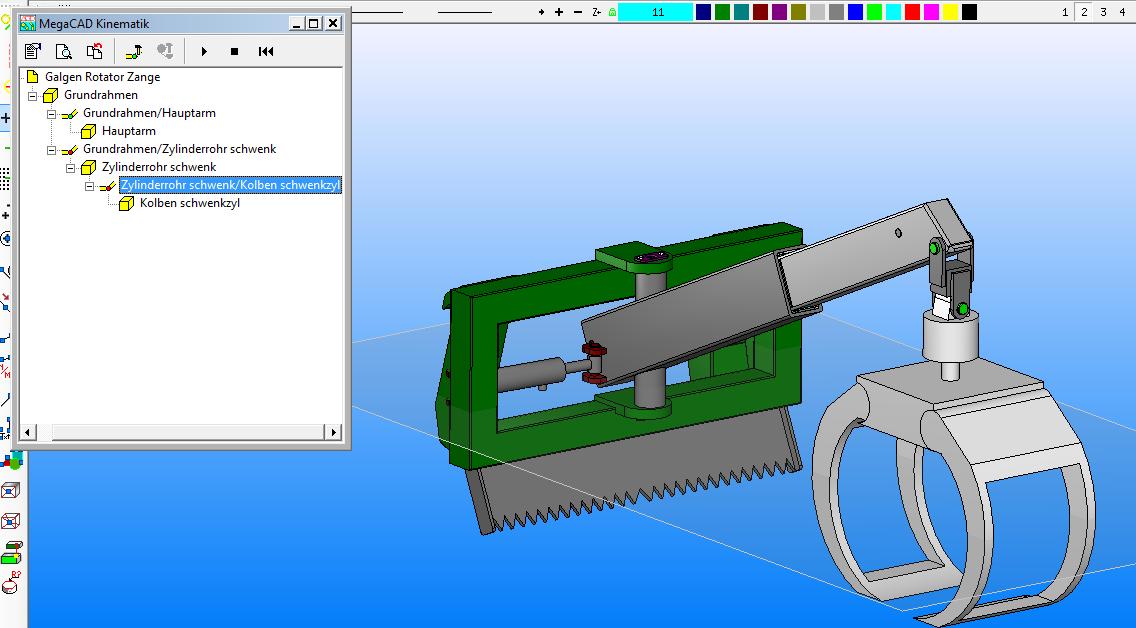
Das Schwenkzylinderrohr ist mit dem Rahmen als abhängige Rotation Verbunden. Das Rohr wiederrum mit dem Kolben als abhängige linearfunktion- der Kolben wieder mit dem Hauptarm als abhängige Rotation. Den Antrieb stellt die Rotationsverbindung Grundrahmen zu Hauptarm.
Eigentlich ist meiner Meinung nach alles so wie in der Kinematikdatei "Roboter.prt", trotzdem kommt immer wenn ich Kinematikmodul öffne die Fehlermeldung (siehe Anhang)
Wenn ich dann starte, dann schwenkt der Hauptarm zwar, allerding bleibt der Zylinder regungslos stehen.
Habe schon mehrere Verbindungsvarianten ausprobiert, aber ich komm einfach nicht weiter. Vielleicht habt ihr ja nen Tip für mich.
Danke schonmal im voraus.
Gruß Ramon
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
| 




















 Fuselfee
Fuselfee