| | |  | Unsere neue Webseite ist live, eine Pressemitteilung
|
|
Autor
|
Thema: Positioniermotor (2822 mal gelesen)
|
Apex
Mitglied
Konstrukteur und Student

   Beiträge: 104
Registriert: 06.02.2004
|

 erstellt am: 13. Feb. 2007 12:34
erstellt am: 13. Feb. 2007 12:34  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo, im Rahmen meiner Technikerausbildung bearbeite ich ein Projekt zur Revision eines Getriebes. Das Getriebe soll in 4x90 Grad Schritten geschwenkt werden. Die Kraftübertragung übernimmt ein schneckengetriebe i=1:40. Ich habe allerdings jetzt einige Fragen zum Antriebsmotor. Habe leider bisher in der E-Technik noch nicht sonderlich viel Erfahrung sammeln können. Brauche eine Motor den man Relativ genau ansteuern kann. Das heißt er müsste bei einer Übersetzung von 1:40 um 90 Grad zu drehen 10 Umdrehungen machen und dann stoppen. Gibt es da etwas passendes? Welche Art Motor ist die richtige, welche Hersteller gibt es da? Ich hoffe ich erhalte da ein paar Tips! MFG
Andreas Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
tanzbaer1963
Mitglied
Maschinenbautechniker, Konstrukteur
Beiträge: 824
Registriert: 15.02.2007 Office
PRDSU 2015 & 2018 Ultimate
Win 10 64
Home
C2D 2*2,13GHz 4GB-Ram Quaddro FX1500
Win 7 64
PDS 2014
|
erstellt am: 13. Mrz. 2007 20:45 <-- editieren / zitieren --> Unities abgeben: Nur für Apex 
Hallo Andreas, da hast Du ja ein schönes Projekt bekommen. Du möchtest als einen Motor einsetzen, den man ziemlich genau ansteuern kann? Da gibt es natürlich die tollsten Sachen, z.B. Servogetriebemotoren die einen Packroboter auf ein 100stel mm genau positionieren lassen und noch vieles mehr. Für solche Komponenten ist aber auch eine entsprechende Ansteuerung erforderlich. Nun kenne ich Deine Aufgabenstellung nicht im Detail, aber ich gehe mal davon aus, dass sie sich nicht sehr stark von den Aufgabenstellungen unterscheidet, wie ich sie seinerzeit hatte. Ich nehme also mal an, dass Deine Steuerung in Bezug auf den Motor nur: "Motor an" und "Motor aus" kann.
Vielleicht solltest Du Dir demzufolge überlegen: "Wie teile ich meiner Steuerung mit, wann sie den Motor stoppen soll?"
oder
"Wie kann ich erfassen, ob am Motor 10 Umdrehungen oder am Getriebeabgang eine 1/4Umdrehung zurückgelegt wurden?" Aber mehr will ich Dir jetzt noch nicht verraten, ist ja schließlich Dein Projekt.  Gruß Ingo PS. wenns wirklich nicht mehr weitergeht, ruhg noch mal fragen.
------------------
Theorie ist,wenn man alles weiß und nichts funktioniert.
Praxis ist,wenn alles funktioniert und keiner weiß warum.
Bei mir wird Theorie und Praxis vereint: Nichts funktioniert und keiner weiß warum!  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
adamsh
Mitglied
Forschung und Entwicklung
Beiträge: 842
Registriert: 27.05.2006 Halbwegs Systemadministration und -entwurf....
|
erstellt am: 13. Mrz. 2007 21:23 <-- editieren / zitieren --> Unities abgeben: Nur für Apex
1) Welche Abtriebsleistung ist gefordert? 2) Welche Genauigkkeit des Winkels ist gefordert (1°,1',1")? 3) Welche Dynmaik ist gefordert? Boeser Kommentar eines Zynikers: Vom Prinzip her kannst Du --- die nicht bekannten --- Anforderungen mit einer Schaltung aus dem Bereich Spielzeug/Homeelektronik erschlagen. Ein Schrittmotr mit 1024 Schritten erlaubt das Getriebe prinzipiell auf 90°/10240 zu positionieren....Einen Schrittmotor kannst Du prinzipiell ueber die LPT-schnittstelle Deines PCs ansteueurn. Gab viele populaere Schaltungen dafuer. mfg HA Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Apex
Mitglied
Konstrukteur und Student
Beiträge: 104
Registriert: 06.02.2004
|
 erstellt am: 15. Mrz. 2007 20:28 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 15. Mrz. 2007 20:28 <-- editieren / zitieren --> Unities abgeben:
Zuerst einmal danke für Resonant und "Anteilnahme"  Vorweck will ich betonen das es mir bewusst ist, das es mein Projekt ist, und letzendlich ich die arbeit leisten muss und auch will. Aufgrund meines Defizites in Elektronischer Antriebstechnik wollte ich allerdings auf dem modernen Weg des Internets und seiner Community´s mein Wissen erweitern. Zur genaueren Darstellung des Projekts: Das Getriebe welches revidiert werden soll ist ist ein 2 Wellen Kegelstirnradgetriebe der Firma Flender (KAF88K4). Die Zwischenwelle und Abtriebswelle sind um 90 Grad zur Antriebswelle versetzt. Zwichenwelle und Abtriebswelle sollen bei der Revision ausgepresst werden. Die Aufnahme des Getriebes soll am Motorenflansch der Antriebswelle geschehen (Habe ich so festgelegt). Randbedingungen: Die "Schwenkvorrichtung" muss fahrbar sein. Die Hydraulische Presse (zum auspressen) der Wellen ist nicht unterfahrbar. Ungünstig für den Schwerpunkt und Standsicherheit des Gestells) Getriebe um 4x90 Grad schwenkbar und in nur einer Position absetzbar. Getriebe werden auf einer Europallette angeliefert. Jetzt zur eigentlichen Frage: Der Schwenkantrieb an sich reicht also völlig aus mit einer Genauigkeit von +- 1 Grad. Kann das mit einem "normalen" elektro Motor realisiert werden (wenn die richtige Steuerung vorhanden ist) oder wird ein Schrittmotor benötigt oder etwas anderes? Das Schneckengetriebe hab ich gewählt um eine Selbsthemmung zu realisieren damit ich keine separate Bremse benötige. Durch das relativ hohe Übersetzungsverhältniss benötigt der Motor kein besonders hohe Antriebsleistung. Das Getriebe ist ja auch nur in der "Luft" zu drehen. MFG
Andreas Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
tanzbaer1963
Mitglied
Maschinenbautechniker, Konstrukteur
Beiträge: 824
Registriert: 15.02.2007 Office
PRDSU 2015 & 2018 Ultimate
Win 10 64
Home
C2D 2*2,13GHz 4GB-Ram Quaddro FX1500
Win 7 64
PDS 2014
|
erstellt am: 18. Mrz. 2007 17:56 <-- editieren / zitieren --> Unities abgeben: Nur für Apex
Hallo Andreas, mit dem Schneckengetriebe in Verbindung mit einem Drehstrommotor hast Du schon mal eine preiswerte Komponente ausgewählt, die für die in Deinem Fall geforderte Positioniergenauigkeit bestimmt ausreicht. Bleibt also nur noch die Frage, wie Du Deiner Steuerung mitteilst, wann die Schwenkeinrichtung die gewünschte Position erreicht hat (darauf wollte ich mit meinen Anmerkungen abzielen). Hierfür gibt es, je nach gewünschter Positioniergenaugkeit, ebenfalls mehrere Möglichkeiten. Drehwertgeber/Absolutwertgeber am Getriebeabgang gekoppelt
Vorteil: hohe Positioniergenauigkeit, Wiederholgenauigkeit
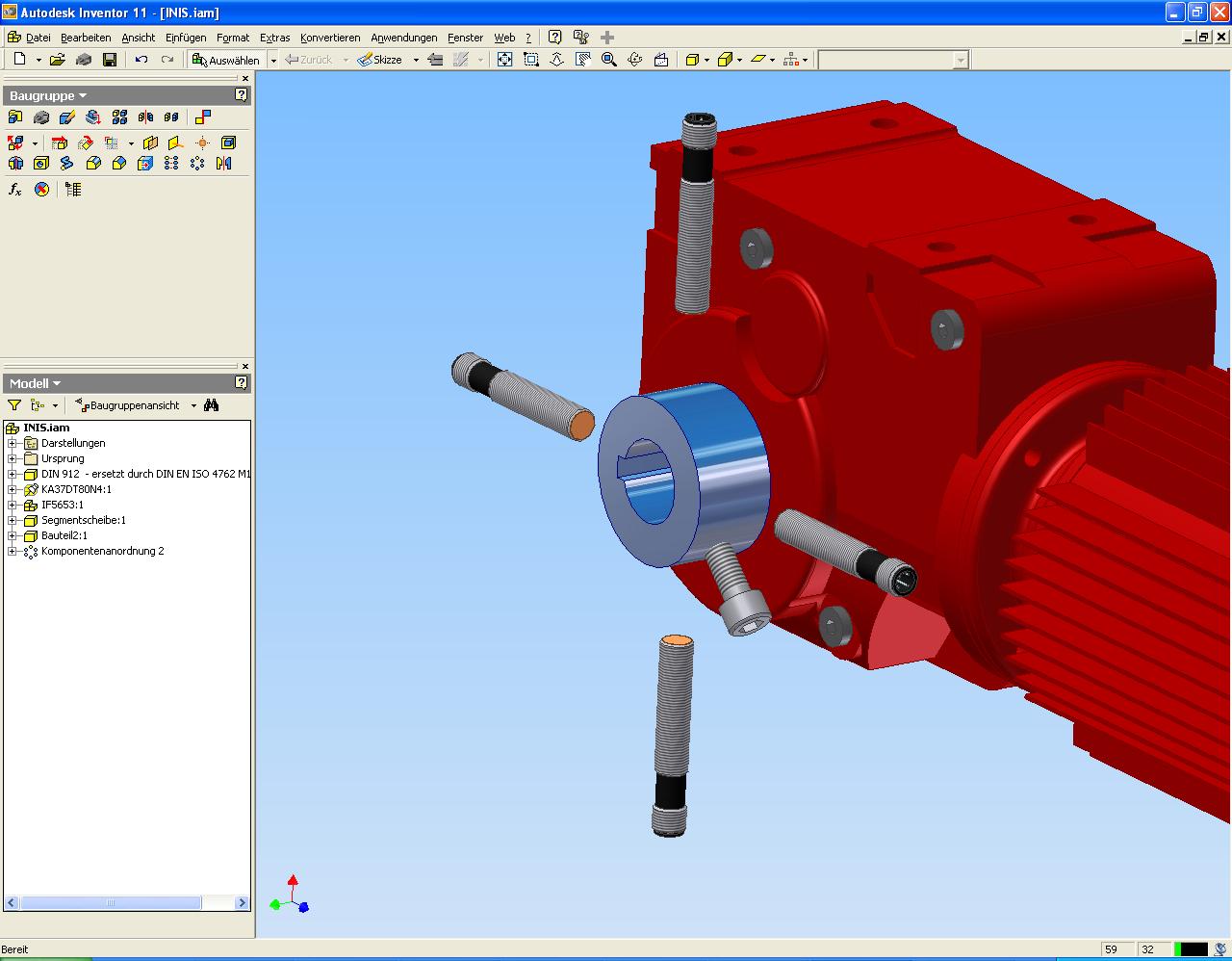
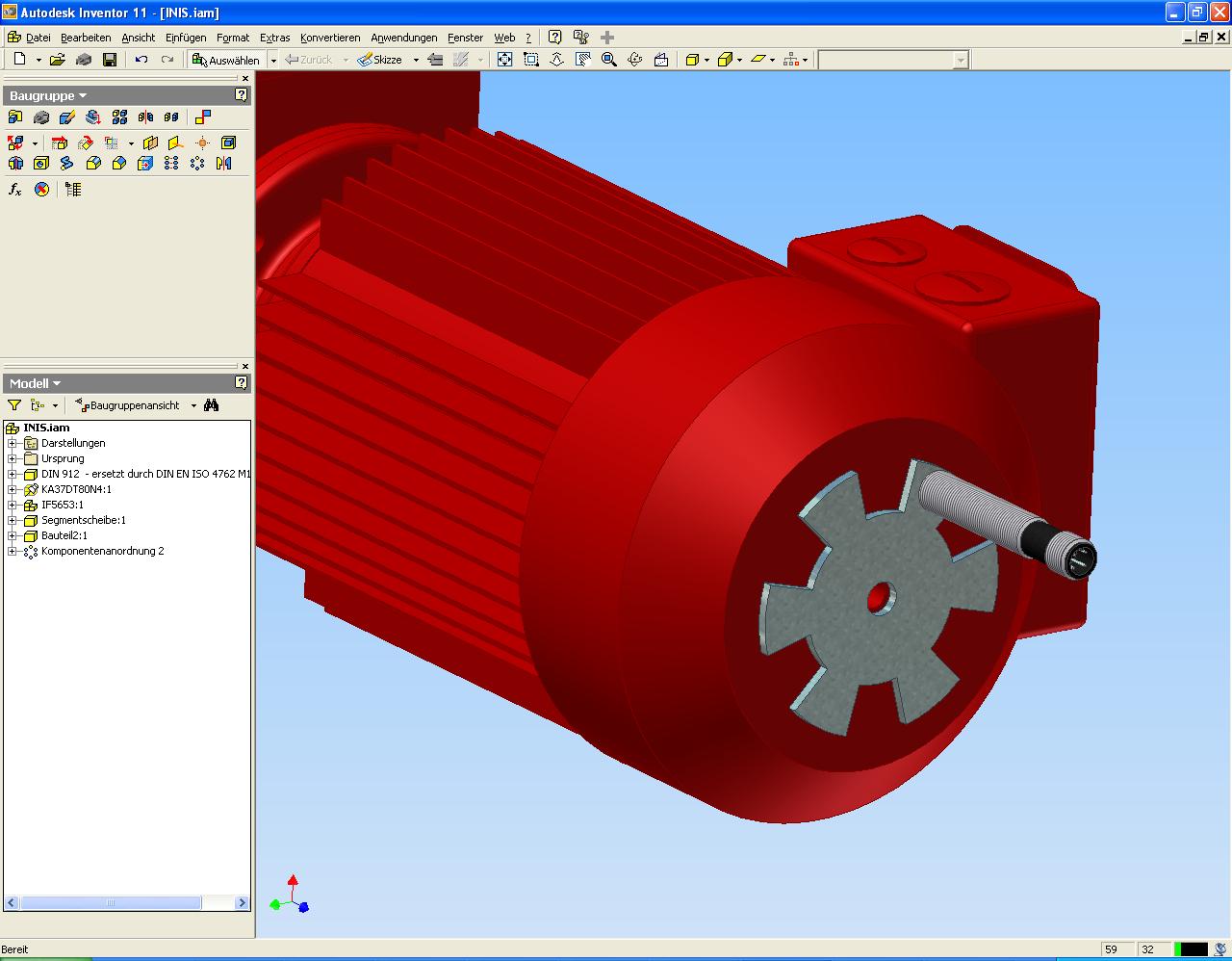
Nachteil: Preis Zwei preiswertere, dafür aber auch ungenauere Möglichkeiten wären die beiden beigefügten Bilder:
Variante 1: direkte Positionserfassung am Getriebeabgang
Variante 2: indirekte Positionserfassung (zählen der Motorumdrehungen) Wobei ich in Deinem Fall Variante 1 bevorzugen würde. Man kann die Halter für die Näherungsschalter so konstruieren, dass man diese um die Welle etwas schwenken und die Stopposition somit einstellen kann. Gruß Ingo ------------------
Theorie ist,wenn man alles weiß und nichts funktioniert.
Praxis ist,wenn alles funktioniert und keiner weiß warum.
Bei mir wird Theorie und Praxis vereint: Nichts funktioniert und keiner weiß warum! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister

Beiträge: 26154
Registriert: 24.11.2002
|
erstellt am: 19. Mrz. 2007 07:14 <-- editieren / zitieren --> Unities abgeben: Nur für Apex
Hallo Andreas, Irgendwie gefällt mir die Aussage "Genauigkeit +/- 1Grad" nicht so recht, denn einen wesentlichen Einfluss hat dabei noch der Radius, auf dem das passiert. Das Spiel im Getriebe muss man ja auch noch berücksichtigen (wird bei Schneckengetrieben durch Verschleiß grösser). Diese Einflüsse werden minimiert wenn der Signalgeber von der Aufnahme des Werkstückes, auf einem möglichst grossen Radius aussen, betätigt wird, erreichst Du eine gute Schaltgenauigkeit.
Der Antriebsmotor (normaler Drehstrommotor) sollte unbedingt eine Bremse drauf haben, die jedenfalls gleichstromseitig separat geschaltet werden muss, dann wird eine Wiederholgenauigkeit auf Bruchteile einer Motorumdrehung genau erreicht. ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Apex
Mitglied
Konstrukteur und Student
Beiträge: 104
Registriert: 06.02.2004
|
erstellt am: 19. Mrz. 2007 11:45 <-- editieren / zitieren --> Unities abgeben:
Danke für die Infos. @tanzbaer1963 so ungefähr hatte ich mir das schon gedacht. Dann muss ich jetzt nur noch das passende Getriebe mit dem passenden Motor finden.
Sollte relativ kompakt sein. @Leo Laimer Das mit der Bremse wäre meine nächste Frage gewesen. Danke für die Info, hatte mir schon gedacht das ich eine benötige da der Motor ja einen Nachlauf hat. Danke für eure Hilfe, werde mich jetzt auf die Suche nach dem passenden Getriebe, Motor und Bremse macht. Das Ergebniss meines Projekts (zumindest was die Konstruktion angeht) kann ich hier ja dann mal veröffentlichen. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Clayton
Ehrenmitglied
Konstrukteur
Beiträge: 1632
Registriert: 07.02.2004 AMD Athlon Phantom II, 6GB, Nvidia Quadro Pro FX 1800
Inventor Series 10
Mathcad 13+14
|
erstellt am: 19. Mrz. 2007 14:26 <-- editieren / zitieren --> Unities abgeben: Nur für Apex
Hi, Ich hab' mal so aehnliches mit einem Hybrid-Schrittmotor gemacht, um ein Widerstandsschweissgeraet auf eine neue Postion zu schieben abhaengig von der Groesse der geshweissten Teile. Funktionierte sehr gut, keinen Nachlauf. Das Gute dabei ist, dass Du die direkt mit 50Hz betreiben kannst. Das waeren in Deinem Fall 500 Impulse/90 Grad, wenn ich das richtig sehe. Die Impulse musst Du allerdings ueber eine Steuerung selber eingeben und zaehlen. Bremse und Feedback hatte ich nicht, waren auch nicht noetig. Gruss Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
| Anzeige.:
Anzeige: (Infos zum Werbeplatz >>)
 |

 Foren auf CAD.de
Foren auf CAD.de