| | |
 | SchraubTec erstmals in Hannover-Treff für industrielle Schraubverbindungen!, eine Pressemitteilung
|
|
Autor
|
Thema: Antriebstechnik? (3014 mal gelesen)
|
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister

   Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|

 erstellt am: 05. Mrz. 2005 11:09
erstellt am: 05. Mrz. 2005 11:09  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo Freunde, Hoffentlich passt dies hierher, ich hab' keinen besseren Platz gefunden... Die Aufgabenstellung lautet, eine kleine Verfahreinheit die sich mit eigener motorischer Kraft bewegt (230V~) einer von einem anderen Element vorgegebenen Linearbewegung folgen zu lassen. Also, es gibt ein linear sich bewegendes Material, so ca. 1-5m/min, und die Verfahreinheiten, die keinen direkten mechanischen Kontakt zu diesem Material haben dürfen, müssen dieser Linearbewegung auf einige -zig Meter Verfahrweg automatisch gleichlaufend folgen. Die grundsätzliche Genauigkeit ist nicht ganz ohne, es darf über die gesamte Verfahrstrecke von ca. 50m eine Wegdifferenz von ca. 0,25m auftreten.
Die Information über die Geschwindigkeit liegt sehr exakt an einer Schnittstelle bereit. Eine Information über den zurückgelegten Verfahrweg des Materials ist nicht so leicht zu erhalten (das sich linear bewegende Material ist nicht einfach zugänglich). Die Verfahreinheiten (es sollen etliche Stück werden) sollen aus Kosten-, Gewichts- und Platzgründen möglichst einfach aufgebaut sein, ohne aufwendige Datenkommunikation und ohne "Elektronenhirn". Nun bin ich auf der Suche nach einer Antriebs- und Regelungssystematik für dieses Projekt. Hat Jemand von Euch eine Idee dazu? ------------------
mfg - Leo Ceterum censeo dynamic highlight obsoletus (est) (Autodesk hat ein offenes Ohr!) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Andy-UP
Moderator
Projektingenieur
    

Beiträge: 2572
Registriert: 27.10.2003 Teilzeitrentner
Inv./Vault Pro 2026
|
erstellt am: 05. Mrz. 2005 15:47 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer 
Hi Leo, Du sagst Dir steht ein Signal zur Verfügung, welches sich proportional zur Geschwindigkeit verhält also vielleicht ein Frequenzumrichter mit einem analogen Ausgangssignal. Natürlich könnte man einen zweiten Antrieb mittels dieses Signals an den ersten ankoppeln. Bin mir nur nicht sicher, ob die geforderte Präzision (0,5%) mit dieser Anordnung erreicht werden kann. Rein gefühlsmässig würde ich aber ja sagen. Das hängt ein bischchen davon ab, wie das Durchlaufmaterial angetrieben wird. (Schlupf?, Verformung etwa beim Walzen?). Grundsätzlich ist, wenn das Durchlaufgut nicht direkt kontaktiert werden kann die Kopplung von Primärantrieb und Hilfsantrieb für die Verfahreinheit, mechanisch oder elektronisch die nächstliegende Lösung. Andreas Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Willi123
Mitglied

Beiträge: 484
Registriert: 15.06.2004 IV8
|
erstellt am: 05. Mrz. 2005 15:49 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer
Hallo Leo, das ist eigentlich eine sehr gängige Aufgabenstellung für Servoantriebe oder Schrittmotoren, deren Regler gekoppelt sind und bei denen 1 Regler die Führungsaufgabe übernimmt. Wenn ich dich richtig verstehe, scheidet so etwas aus Kostengründen aus? Die geforderte Gleichlaufgenauigkeit erscheint auf den ersten Blick zwar nicht sehr hoch, so dass man versucht sein könnte, die Drehzahl der Folgeantriebe z.B. über die Spannung oder mit Frequenzumrichtern zu steuern. Bei der Wegstrecke von 50m und ohne Positionsrückmeldung hätte ich dabei aber große Bedenken. Oder kann man von idealen Randbedingungen ausgehen? Wie sieht überhaupt der Lastfall aus? Was ist das für eine Schnittstelle? ------------------
Gruß, Willi123  Das Internet ist uninteressant !! (Bill Gates, 1995) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Lucian Vaida
Moderator
Dipl.-Ing. / Konstruktion

Beiträge: 3852
Registriert: 14.11.2002 Inventor 2024
Windows10 22H2
HP Z240
|
erstellt am: 06. Mrz. 2005 10:50 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer
Zitat:
Original erstellt von Leo Laimer:
...Eine Information über den zurückgelegten Verfahrweg des Materials ist nicht so leicht zu erhalten (das sich linear bewegende Material ist nicht einfach zugänglich)....
Da kommt auch von mir eine Gegenfrage. Wie wird die Linearbewegung des Materials erzeugt? Ist es ein Kettentrieb? In diesem Fall könntest du die Bewegung über einen Inkrementalgeber "ablesen". Dann kannst du die Verfahreinheit mit einem Getriebemotor mit integriertem FU antreiben. Die Synchronisation wäre unter diesen Umständen sehr präzise (zumindest im mm-Bereich - bezogen auf die 50 m).
------------------
Gruß,
Lucian
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 06. Mrz. 2005 18:34 <-- editieren / zitieren --> Unities abgeben:
Hallo Freunde, Ich bin erst jetzt wieder zurück von einem WE-trip... Danke jedenfalls für die Antworten! Das stetig durchlaufende Ausgangsmaterial wird von einem Kettentrieb (wie Raupenabzug) angetrieben, hat also über die gesamte Länge die gleiche Geschwindigkeit, und wird als Prozeßparameter nur selten und gerindfügig verändert.
Wir können von der Antriebseinheit beliebig Signale abgreifen (z.B. Drehgeber beliebiger Ausführung und Auflösung anbauen). Das Problem scheint zu sein, wie wir unsere Verfahreinheiten möglichst synchron dazu bewegen, wobei auch die Frage ist was passiert wenn ein Schlupf passiert ist - da sollten wir wieder aufholen, also Schlupf erkennen und kurzzeitig schneller fahren zum kompensieren.
Und dabei sollen die Verfahreinheiten möglichst preisgünstig gehalten werden. Also, FU-getriebene Getriebemotore wären sicherlich naheliegend.
Ich kann das Soll-Signal für die Soll-Geschwindigkeit ja irgendwie drahtlos oder per Schleifkontakt auf die Verfahrwagen übertragen. Die Stromversorgung wird ja auch per Schleifkontakt übertragen. Es müssen ja theoretisch auch immer alle Verfahreinheiten gleich schnell fahren. Jetzt möchte ich unbedingt vermeiden, daß ich pro Verfahrwagen eine riesige Steueranlage mit NC, usw. mitführen muß. Also, Servomotore fallen IMHO flach. flach. Gibt's FU mit integrierter SPS für eine einfache, aber sehr genaue Folgeregelung? Und was mache ich wirklich, wenn ein Wagerl hintennachhinkt (aus welchem Grund auch immer)? Um den Prozesserfolg sicherzustellen, muß dieses Wagerl schleunigst wieder aufholen und an seiner richtigen Position wieder mitfahren.
Woher weiß das Wagerl, ob es "richtig" mitläuft oder hintennach, oder gar vorne weg?
(Der Abstand von Verfahrwagen zu Verfahrwagen ist unregelmäßig, der Start von jedem Wagerl wird vom zentralen Prozeß vorgegeben, aber jedes Wagerl soll auf ca. 0,25m genau mit seinem zugeordneten Materialstück mitfahren). Ansonsten wären ja die Randbedingungen nicht dramatisch: Es ist eine rel. saubere Umgebung, mit wenig Temperaturschwankungen, und keine dramatischen chemischen Einflüsse.
Idee:
Ich speise in die Stromzufuhr der Verfahrwagen mit einem gemeinsamen FU ein, der die der Geschwindigkeit entsprechenden Frequenz ausgibt.
Wie genau halten die Verfahrwagen dann die theoretische Geschwindigkeit ein?
------------------
mfg - Leo Ceterum censeo dynamic highlight obsoletus (est) (Autodesk hat ein offenes Ohr!) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
murphy2
Ehrenmitglied
-
Beiträge: 1726
Registriert: 30.07.2002
|
erstellt am: 06. Mrz. 2005 20:08 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer
Schlupf: Ich nehme hier immer ein eigenes Rad, an dem nur der Inkrementgeber hängt und mach hier auch durchaus deren zwei. Geht Ihr Raupenzug leer durch, dann bleibt der Geber auch stehen. Spinnt ein Geber, kann eine intelligente Software das anhand von Plausibilitätsprüfungen erkennen und melden. Auch bei den Wägen sollten Sie die Info, wo der grade ist, nicht am Antrieb abgreifen, weil sonst Ihr Wagen auch irgendwo rutschen kann und Ihre Steuerung das nicht erfährt. Auch Ketten udn Zahnriemen können reissen. Sie sagen leider nichts, in welchem Leistungsbereich sich das Ganze abspielt, ich bin meist im <1Nm-Bereich, da sind Schrittmotore eine ganz passable Lösung, allerdings kosten meine Endstufen (und nur die allein) schon über 700 Euros, wirklich brauchbar ist ab ca. 300 Euros. Damit dürfte Schrittmotor für Sie ausfallen. Alles an einen FU zu hängen, geht aus meiner Erfahrung dann, wenn die Motore formschlüssig übertragen, bleibt aber einer hängen, ist vorbei mit lustig. Daher hab ich in solchen Fällen immer einen Microcontroller mit drin, der sich um die Regelung kümmert und Aua an die übergeordnete Steurung schreit, wenn er nicht mehr vom Fleck kommt. Und dort steht meist dann ein Ignore.....
------------------
Wenn man auf die Frage "Wie soll das noch weitergehen" keine Antwort findet, kann es helfen, das erste Wort wegzulassen. Murphy, 9.2.05 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 06. Mrz. 2005 20:42 <-- editieren / zitieren --> Unities abgeben:
Hallo murphy, Der Leistungsbereich wird bei 50-150W pro Verfahrwagen liegen, da die zu transportierenden Apparaturen nur ca. 25kg schwer sind, und die Geschwindigkeit ja nicht hoch ist.
Ich könnte mir schon vorstellen, daß sich das mit Schrittmotore ausgehen würde. Ich hab' ja jetzt fleissig recherchiert, und käme in etwa auf das oben angeschnittene Konzept, daß alle Motore völlig synchron laufen, und der Vortrieb über je ein kleines Ritzel auf Zahnstange passiert, dann gibt's absolut keinen Schlupf zwischen Rad und Schiene, und die gesamte Genauigkeits-Thematik wird auf den einen FU konzentriert. Ob der die Frequenz auf 0,5% genau halten kann? Immerhin bräuchte ich dann keinerlei "Intelligenz" in den Verfahrwagen! Jetzt bin ich also auf der Suche nach Lieferanten für Synchron-Motore (ev. zusammen mit Getriebe), aber nicht die in Geräten häufige "offene" Bauweise, sondern eher so ähnlich wie eine Norm-Drehstrommotor der untersten Leistungsklasse (120W oder so)... ------------------
mfg - Leo Ceterum censeo dynamic highlight obsoletus (est) (Autodesk hat ein offenes Ohr!) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 06. Mrz. 2005 21:03 <-- editieren / zitieren --> Unities abgeben:
Hallo Freunde, Eigentlich bin ich bei Lenze schon fündig geworden mit einem Antrieb, der mir gut zu meiner Idee passen zu scheint. Bin gespannt was morgen der Kunde dazu sagt! ------------------
mfg - Leo Ceterum censeo dynamic highlight obsoletus (est) (Autodesk hat ein offenes Ohr!) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 12. Mrz. 2005 11:22 <-- editieren / zitieren --> Unities abgeben:
|
Andy-UP
Moderator
Projektingenieur
Beiträge: 2572
Registriert: 27.10.2003 Teilzeitrentner
Inv./Vault Pro 2026
|
erstellt am: 12. Mrz. 2005 11:38 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer
|
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 12. Mrz. 2005 14:17 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von Andy-UP:
...Dafür gibts doch Energieketten...
50m lange??? <G> Vielleicht habe ich noch nicht dazugesagt:
Am Ende der Mitfahrstrecke müssen die Verfahreinheiten die Kurve kratzen und wieder an den Ausgangspunkt zurückkehren, mit rascher Fahrt, und auf einer parallel daneben oder darüber liegenden Strecke.
Aber dieses rasch Zurückfahren hätte ich gedanklich schon gelöst! ------------------
mfg - Leo Ceterum censeo dynamic highlight obsoletus (est) (Autodesk hat ein offenes Ohr!) [Diese Nachricht wurde von Leo Laimer am 12. Mrz. 2005 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Willi123
Mitglied
Beiträge: 484
Registriert: 15.06.2004 IV8
|
 erstellt am: 12. Mrz. 2005 16:46 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer
erstellt am: 12. Mrz. 2005 16:46 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer
Zitat:
Original erstellt von Leo Laimer:
Der Kunde will "High-Tech", natürlich zu niedrigsten Preisen. Grrrr!
Das kenne ich  . Zuerst erzählen sie einem, dass alles ganz einfach ist und deshalb ja auch nichts kostet, dann zeigen sich neue Randbedingungen, die sich aber selbstverständlich auf den Kostenrahmen nicht auswirken und zum Schluss wollen sie dann doch den Mercedes (man gönnt sich ja sonst nichts), aber das Budget ist leider schon festgeschrieben. Und bis dahin hat man ihnen - natürlich kostenlos (man ist ja serviceorientiert) - zigmal den jeweiligen Stand der Erkenntnis erläutert und ausgearbeitet. . Zuerst erzählen sie einem, dass alles ganz einfach ist und deshalb ja auch nichts kostet, dann zeigen sich neue Randbedingungen, die sich aber selbstverständlich auf den Kostenrahmen nicht auswirken und zum Schluss wollen sie dann doch den Mercedes (man gönnt sich ja sonst nichts), aber das Budget ist leider schon festgeschrieben. Und bis dahin hat man ihnen - natürlich kostenlos (man ist ja serviceorientiert) - zigmal den jeweiligen Stand der Erkenntnis erläutert und ausgearbeitet. Ich liebe unseren Job.  ------------------
Gruß, Willi123 Das Internet ist uninteressant !! (Bill Gates, 1995) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Andy-UP
Moderator
Projektingenieur
Beiträge: 2572
Registriert: 27.10.2003 Teilzeitrentner
Inv./Vault Pro 2026
|
erstellt am: 12. Mrz. 2005 20:32 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer
Hallo Leo, über die Länge würde ich mir keine Gedanken machen, hab auch schon dreimal so lange E-Ketten projektiert. Aber Rückfahrt auf einer anderen Schiene, anderem Weg, das ändert die Sache natürlich. Ich hätte dafür keine Lösung anzubieten. Wenn Du das schon gedanklich gelöst hast; Hut ab. Da wäre ich aber zu neugierig, wie Du das anstellen willst.  Ciao
Andreas Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 14. Mrz. 2005 07:38 <-- editieren / zitieren --> Unities abgeben:
Hallo Andreas, Bei FU-Antrieb einfach mit hoher Drehzahl retourfahren, und bei Synchron-Antrieb auf einem anderen Rad-Durchmesser.
Geschätzt Faktor 3 müßte möglich sein, in beiden Fällen. ------------------
mfg - Leo Ceterum censeo dynamic highlight obsoletus (est) (Autodesk hat ein offenes Ohr!) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 06. Mai. 2006 09:43 <-- editieren / zitieren --> Unities abgeben:
Hallo Freunde, Fast genau ein Jahr später hat ein anderer Kunde nun doch angebissen und wir dürfen eine Anlage realisieren. Wir werden mal anfangen mit Synchronmotore als Antrieb, und ein zentraler FU gibt die Geschwindigkeit vor. Laut Hersteller kann der FU eine digital vorgegebene Sollfrequenz auf 0,01% genau einhalten. Jetzt bleibt als einzige mögliche Ungenauigkeit die Übertragung der Räder auf die Schiene. Ich bin gerade am Tüfteln... ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
eberhard
Ehrenmitglied V.I.P. h.c.
Konstrukteur
Beiträge: 2072
Registriert: 21.06.2002 MDT 5 bis MDT 2008
Inventor Pro 2012
SWX 2011 mit RWX 7
Proe WF2, WF4
DesignSpace 12
Dell M6400 3GHz 8GB 2x250GB
Dell M70 2,13GHz 2GB
Dell 360 P4 2,8Ghz 2GB FX500
NoName P3 1GHz 512MB
|
erstellt am: 06. Mai. 2006 10:02 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer
Hallo Leo, noch ein kleiner Hinweis zu der Sache: Kann mir vorstellen, das das ganze auch mit Gleichstrom funktioniert (deine ursprüngliche Idee basiert doch auf einem Gleichstrommotor, wenn ich mich nicht irre). Ob man es dort einsetzen darf, ist eine andere Frage. Jedenfalls gibt es ein grosses Spektrum von Gleichstrommotoren mit passenden Getrieben und Steuerungen dazu. Hersteller z.B. Maxon und Faulhaber. ------------------
Freundliche Grüsse - Eberhard Willach Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Lucian Vaida
Moderator
Dipl.-Ing. / Konstruktion
Beiträge: 3852
Registriert: 14.11.2002 Inventor 2024
Windows10 22H2
HP Z240
|
erstellt am: 07. Mai. 2006 11:55 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer
Zitat:
Original erstellt von Leo Laimer:
...Jetzt bleibt als einzige mögliche Ungenauigkeit die Übertragung der Räder auf die Schiene. Ich bin gerade am Tüfteln...
50 m Zahnstange ist ein bisschen viel. Was ist mit einer Rollenkette, die als "Zahnstange" missbraucht wird? ------------------
Gruß
Lucian Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 07. Mai. 2006 17:24 <-- editieren / zitieren --> Unities abgeben:
Hallo Lucian, Nach neuesten Infos sollen es 100lfm Strecke sein, die "genau" gefahren werden muss, also wären es 200lfm Zahnstange (auf jeder Seite der Schiene eine)... also wirklich ein bisserl viel. Wir probierens jetzt mal mit Vulkollan-Rädern, die am Aussendurchmesser auf Maß geschliffen werden. ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Doc Snyder
Ehrenmitglied V.I.P. h.c.
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen

Beiträge: 13772
Registriert: 02.04.2004 Entwicklung von Spezialmaschinen und Mechatronik
Autodesk Inventor
|
erstellt am: 07. Mai. 2006 19:40 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer
Moin! Zahnstangen fände ich besser, die kann man an den Enden passgenau stoßend montieren, auch so dass ein Zahnrad da sauber drüber läuft. Und wenn bei 11,052 mm Zahn Nr. 5526 angeschraubt ist, dann ist der immer genau da und nirgendwo anders; da stimmt dann auch jede Position. Selbst bei präzisionsgereckten Rollenketten wäre das in dieser Länge fraglich, und kosten tun die auch viel. Und bei einem Gummirad weiß man nie, vor allem über weite Wege nicht. Und nicht nur dort habe ich Bedenken bzgl. Schlupf: Meines Wissens sind diese frequenzumrichtergetriebenen Motoren Asynchronmotoren. Auf Synchrondrehzahl haben Asynchronmotoren kein Drehmoment, erst mit dem Schlupf baut sich das auf (die bekannten 1450 U/min sind in Wirklichkeit 1500 U/Min minus Schlupf), und dieser Effekt ist lastabhängig. Für ein Förderband mit konstanten Bedingungen mag das reichen, aber für einen Positionsfolgeantrieb auf langen Schienen mit wer weiß was für Ablagerungen - na ja. Die Aussage zur Frequenzkonstanz des Umrichters ist meiner Meinung nach Augenwischerei. Wenn das so einfach wäre, wer würde dann noch Servomotoren kaufen? Für einen Synchronantrieb würde ich Schrittmotoren nehmen, damit habe ich schon viel solcher Sachen verwirklicht. Die laufen synchron, und es gibt die mittlerweile auch mit integriertem Encoder und Schrittfehlerfolgeregelung (!), auch in diesem Leistungsbereich. Die kosten natürlich was, aber mehr brauchst Du dann auch nicht. Denen gibts Du ein Pulssignal, und solange keine Fehlermeldung kommt (mit einstellbarer Alarmschwelle), sind die immer genau da wo sie sein sollen. Bei Schrittmotoren muss man nur die Anfahrrampe ordentlich berechnen. Weil da so viel Unsinn gemacht wird, sind die meistens gnadenlos überdimensioniert oder auch oft als unzuverlässig verrufen . Es soll aber Leute geben, die so was richtig können. Gruß
Roland ------------------
www.Das-Entwicklungsbuero.de Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 07. Mai. 2006 19:57 <-- editieren / zitieren --> Unities abgeben:
Hallo Roland, Wir verwenden Synchronmotore (Reluktanzmotore), keine Asynchronmotore. So ein Synchronmotor läuft beim Hochlauf asynchron, bis er "in Tritt fällt", und hält dann ganz genau die Drehzahl synchron mit der Frequenz, solange nicht das geforderte Moment höher als das Kippmoment (ca. 2,5 x Nennmoment) ist.
So ein Synchronmotor ist recht ähnlich einem Schrittmotor. Der FU wird digital gesteuert, ist also so genau wie der interne Quartz und die Bitbreite, mit der das Soll-Signal vorgegeben wird, je nach Gerät sind das 0,0001Hz bis 0,037Hz. Zahnstange über die ganze Länge wäre gut, aber teuer.
Wir bauen jetzt im Eiltempo (darum So.-Nachm. im Büro) eine Versuchsanlage nur mit "Reibrad"-Antrieb, und wenn's geht gehts, wenn nicht kommt eine Zahnstange zusätzlich rein. ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ReinhardN
Mitglied
Dipl.Ing.
Beiträge: 1288
Registriert: 03.05.2005
|
erstellt am: 07. Mai. 2006 21:27 <-- editieren / zitieren --> Unities abgeben: Nur für Leo Laimer
|
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 07. Mai. 2006 21:52 <-- editieren / zitieren --> Unities abgeben:
Genau das wurde in einer früheren Versuchsanlage schon mal gemacht. Leider war damals die rein handwerkliche Lösung des Anbringens des Zahnriemens ziemlich unglücklich (geklebt+genietet), aber funktioniert hat's im Prinzip. Ich hätte an sich eine Kunststoff-Zahnstange in's Auge gefasst, die kann ich hoffentlich ein wenig besser befestigen.
(Antriebsleistung ist ca. 2x65W) ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Ehrenmitglied V.I.P. h.c.
CAD-Dienstleister
Beiträge: 26154
Registriert: 24.11.2002 IV bis 2019
|
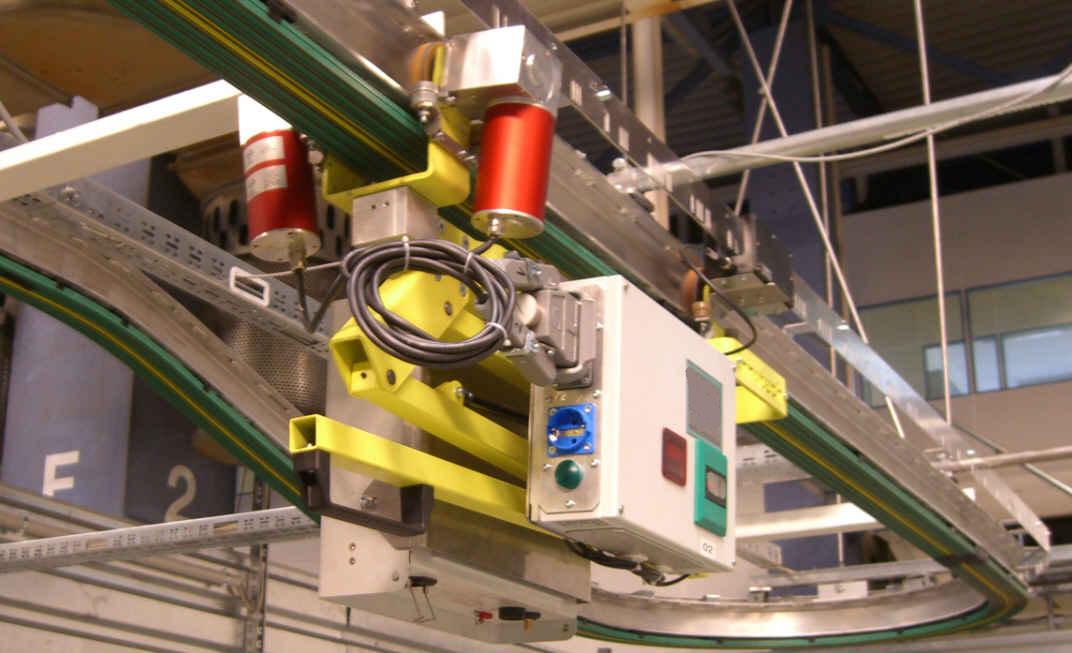
erstellt am: 10. Jul. 2006 08:19 <-- editieren / zitieren --> Unities abgeben:
|

 Foren auf CAD.de
Foren auf CAD.de