| | |
 | Wie eine leistungsfähige Visualisierung das Model Based Enterprise , eine Pressemitteilung
|
|
Autor
|
Thema: DMU Ebene Verbindung mit Abstand (1862 / mal gelesen)
|
Joramo
Mitglied

   Beiträge: 11
Registriert: 30.06.2020
|

 erstellt am: 30. Jun. 2020 11:07
erstellt am: 30. Jun. 2020 11:07  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
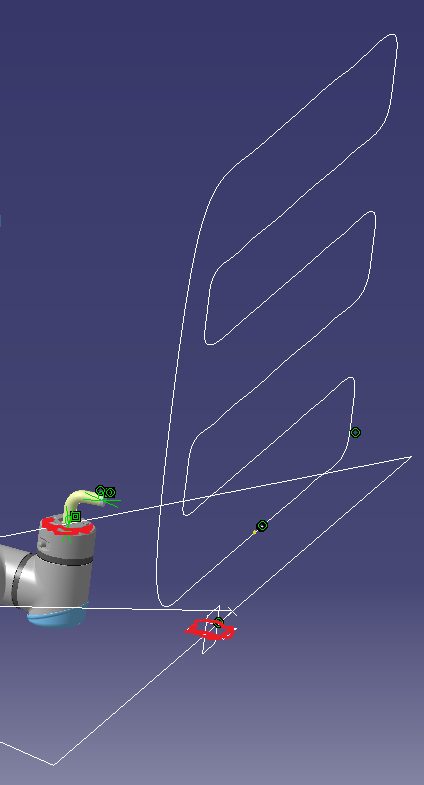
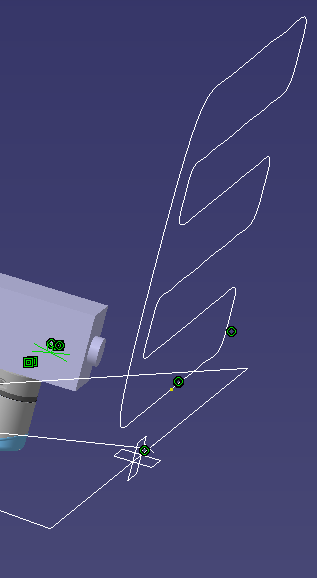
Hallo, ich möchte einen Roboterarm mit mehreren Gelenken einen 2-dimensionalen Pfad abfahren lassen. Ich habe bereits alle Verbindungen so erzeugt, dass der Mechanismus simuliert werden kann. Jetzt ist er aber noch wichtig, dass die Ebene des Endeffektors vom Roboter parallel zur orthogonalen Ebene des Pfades steht. Anbei sind zwei Bilder, da ich aus Verschwiegenheitsgründen die ganze Datei leider nicht zur Verfügung stellen darf.
Das erste Bild zeigt das Endsegment des Roboters mit einem selbst konstruierten Winkel. Der verschwindet dann in einer Kamera, siehe Bild 2. Welche Verbindung kann ich dafür verwenden? Mit der Ebenen Verbindung erzeuge ich eine Kongruenz, welche in Konflikt mit den bisherigen Bedingungen steht.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater

Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 30. Jun. 2020 16:14 <-- editieren / zitieren --> Unities abgeben: Nur für Joramo 
Hallo Joramo und willkommen im Forum. Ich mutmasse einmal, dass es sich um die Kinematik handelt Leider kann ich wegen fehlender Informationen (welche Joints, welche Bewegungsarten, Freiheitgrade, Antriebe...) nicht konkret helfen. Aber es hört sich so an, als müsstest Du ein Zwischenpart einfügen, in welchem du ein prismatik Joint zu deinen bestehenden Parts erzeugen musst... ------------------
gruß, Tom  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Joramo
Mitglied
Beiträge: 11
Registriert: 30.06.2020
|
erstellt am: 01. Jul. 2020 08:54 <-- editieren / zitieren --> Unities abgeben:
Hallo Tom, ich versuche mal, es ausführlich zu erklären.
Der abzufahrende Pfad ist ein Part, welches ich über eine "starre Verbindung" mit der Basis des Roboters verbunden habe. Alle weiteren Robotersegmente habe ich über "revolute Joints" verbunden. Am Endeffektor habe ich über eine Skizze zwei Punkte angefügt, die ich zuerst mit dem Pfad kongruent gesetzt habe und in DMU dann mit eine "Punkt-Kurve-Verbindung" verbunden habe. Abschließend habe ich die Ebene des Endeffektors mit der "Ebenen Verbindung" parallel zur Pfad-Ebene gesetzt. Zu den Freiheitsgraden: die kann ich theoretisch auf 0 bringen, wenn ich bei den "revolute Joints" die abhängige Länge markiere. Das möchte ich aber eher vermeiden. Ohne abhängige Länge ist DOF = 2. Was du mit Antrieben meinst, weiß ich leider nicht. Ist damit die abhängige Länge gemeint? Grundsätzlich ist eine Punkt-Kurven-Verbindung mit abhängiger Länge, ansonsten s. o. Ich verstehe nicht ganz, was für ein Part ich einfügen müsste, um ein prismatic Joint erzeugen zu können. Gruß Joramo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
    
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 01. Jul. 2020 09:13 <-- editieren / zitieren --> Unities abgeben: Nur für Joramo
Servus Ja mit "abhängige Länge" ist ein Antrieb gemeint (Wert dieser Bedingung lässt sich steuern).
Skizziere mal (zB in einem deiner Bilder) welchen Freiheitsgrad/welche Ebenen du noch definieren willst. Gruß
Bernd ------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Joramo
Mitglied
Beiträge: 11
Registriert: 30.06.2020
|
erstellt am: 01. Jul. 2020 09:21 <-- editieren / zitieren --> Unities abgeben:
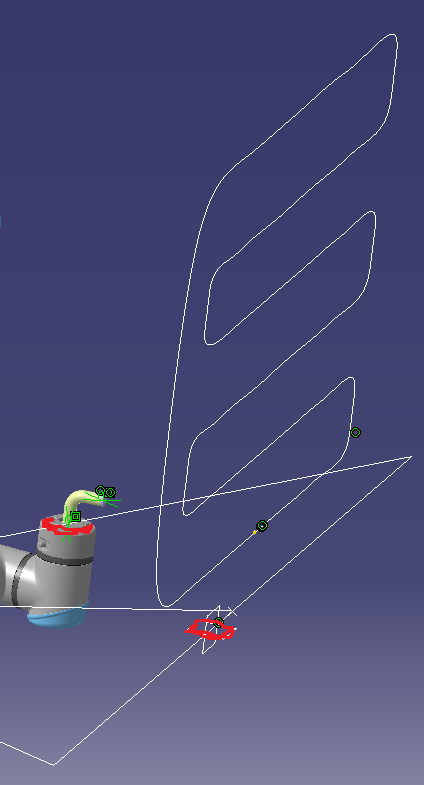
Hallo Bernd, schöner ging leider nicht  im Bild hab ich die beiden Ebenen, die parallel gestellt werden sollen, rot markiert. im Bild hab ich die beiden Ebenen, die parallel gestellt werden sollen, rot markiert.
Wenn ich da eine "Ebene Verbindung" erstellen will, kommt die Fehlermeldung "Der Mechanismus weist zu viele Befehle auf". Das liegt meiner Meinung nach daran, dass durch die "Ebene Verbindung" eine Kongruenz zwischen beiden Ebenen erzeugt wird, die im Konflikt mit der Kongruenz der Punkte am Endsegment und dem Pfad steht. Gruß Joramo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 01. Jul. 2020 09:30 <-- editieren / zitieren --> Unities abgeben: Nur für Joramo
Servus Ich sehe in deinem Bild keine roten Markierungen.
Bitte immer eindeutige Dateinamen verwenden, damit alte Bilder nicht überschrieben werden. (Nachvollziehbarkeit)
Zitat:
dass durch die "Ebene Verbindung" eine Kongruenz zwischen beiden Ebenen erzeugt wird, die im Konflikt mit der Kongruenz der Punkte am Endsegment
ja genau. Es heißt ja "ebene" Verbindung und nicht parallel. Eventuell benötigst du ein weiteres Part (nur Linien, Ebenen) dass sich geeignet mit deinem Mechanismus mit bewegt und mit dem du die gewünschte Ausrichtung steuern kannst/definierst. Gruß
Bernd ------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Joramo
Mitglied
Beiträge: 11
Registriert: 30.06.2020
|
erstellt am: 01. Jul. 2020 09:39 <-- editieren / zitieren --> Unities abgeben:
Habe den Dateinamen geändert, sieht man es jetzt? Ein statisches Part aus Linien und Ebenen kann ich aber nicht mit der "Ebenen Verbindung" verknüpfen, da sich das Endsegment nach links/rechts bzw. oben/unten bewegen soll.
Funktioniert das dann mit der "prismatischen Verbindung", die Tom vorgeschlagen hat? Danke übrigens für die schnellen Antworten  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 01. Jul. 2020 10:10 <-- editieren / zitieren --> Unities abgeben: Nur für Joramo
Servus Ich würde ein zusätzliches Part (siehe Bild in lila) einfügen.
Dieses mit einer ebenen Verbindung zum "Gestell" und mit einer zylindrischen Verbindung zum entsprechenden Glied des Roboters ausrichten. Gruß
Bernd
------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Joramo
Mitglied
Beiträge: 11
Registriert: 30.06.2020
|
 erstellt am: 03. Jul. 2020 14:18 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 03. Jul. 2020 14:18 <-- editieren / zitieren --> Unities abgeben:
|

 Foren auf CAD.de
Foren auf CAD.de



 |
|