| | |
 | KISTERS 3DViewStation auf der IMTS 2026, eine Veranstaltung am 14.09.2026
|
|
Autor
|
Thema: Kontakt von Kegelzahnrädern (2411 mal gelesen)
|
mt151187
Mitglied
Student
   Beiträge: 7
Registriert: 13.06.2013 CATIA V5R19
|

 erstellt am: 13. Jun. 2013 11:28
erstellt am: 13. Jun. 2013 11:28  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
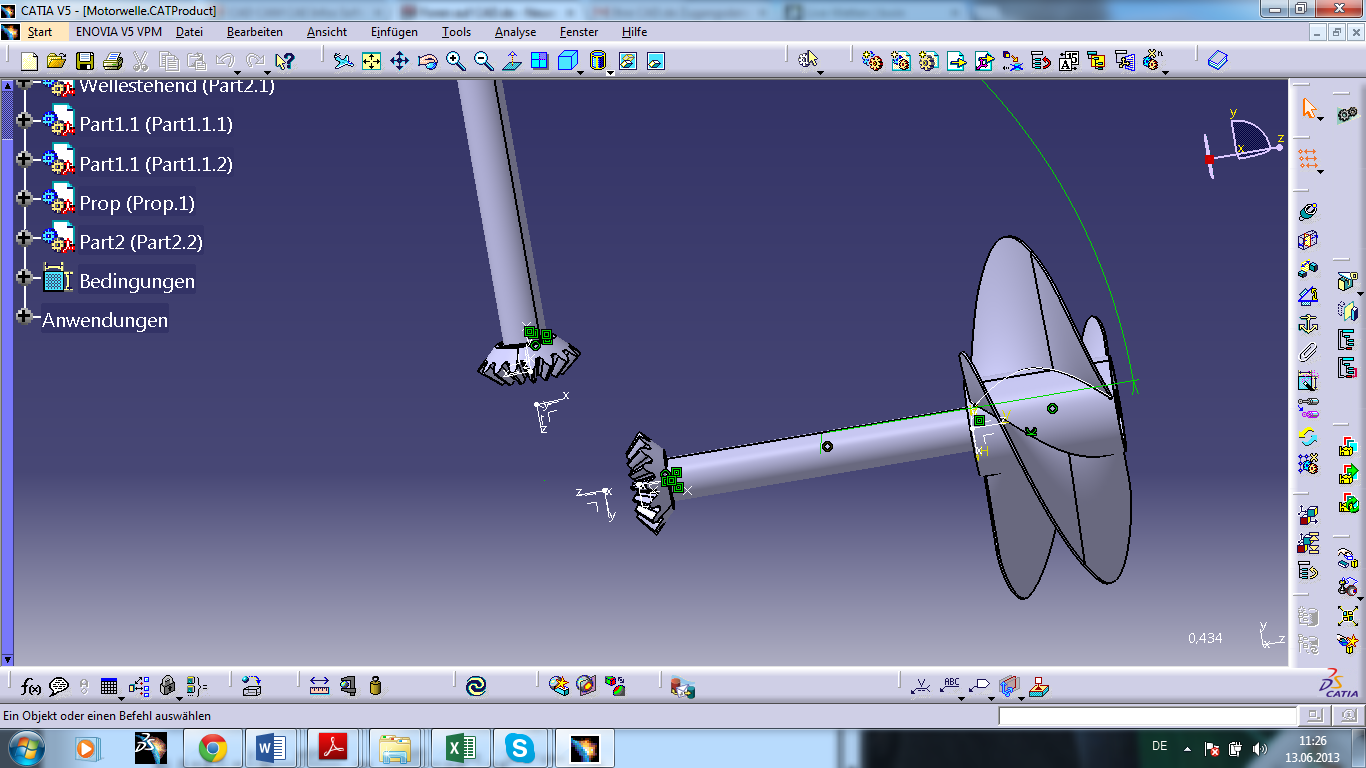
Hallo, ich studieren Maschinenbau und habe mir als Projekt in Catia eine Schiffsschraube ausgesucht. Ich habe auch schon alles fertig modelliert. Mein Ziel ist es nun die Schiffsschraube mit einer Welle zu verknüpfen und am anderen Ende der Wele ein Kegelzahnrad für eine 90° Umlenkung anzubauen.
Die senkrechte Welle möchte ich dann später zu einer Rotation animieren. Diese Welle hat ebenfalls das gleiche Kegelzahnrad an einem Ende. Mein Problem ist nun, dass ich nicht weiß wie ich die beiden Zahnräder miteinander verknüpfen muss bzw. kann. Meine Wellen habe ich über die Winkelbedingungen bereits auf die 90° eingestellt, aber jetzt weiß ich nicht mehr weiter. Im Anhang habe ich noch einen Screenshot von meiner Baugruppe erstellt. Vielen Dank bereits im Voraus. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
moppesle
Ehrenmitglied V.I.P. h.c.
Konstrukteur

Beiträge: 3438
Registriert: 28.05.2009 CATIA V5 R19 SP9
WIN 7 64bit
|
erstellt am: 13. Jun. 2013 11:52 <-- editieren / zitieren --> Unities abgeben: Nur für mt151187 
Hallo mt151187, willkommen im Forum. Bitte Systeminfo ausfüllen. Nun zu deiner Frage. Du kannst die beiden Parts mit dem Befehl "Coincidence Constraint" von Punkt zu Punkt(bei dir der Origin Point der Achse) positionieren.
------------------
Gruß Uwe Auch Catia ist nur ein Mensch!   Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater

Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 13. Jun. 2013 12:44 <-- editieren / zitieren --> Unities abgeben: Nur für mt151187
Hallo mt151187 Du sagst, du möchtest es animieren... Wenn du es mit der Kinematig machen möchtest: verschieb die Teile wie Uwe gesagt hat. Oder einfach nur "von Hand" mit dem Kompass, dass es schick ausschaut. Der Kinematik ist es danach egal, wie, oder ob die Zahnräder sich berühren. Den "Joint" den du in der Kinematik brauchst ist dann entweder der "Gear Joint", oder - wenn du die Wälzkreise hast - der RollCurveJoint. Eine Animation über das Assembly-Design wird nicht gehen. Jedenfalls nicht Zahnrädern. Ein Kardan würde schon gehen... ------------------
gruß, Tom Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
mt151187
Mitglied
Student
Beiträge: 7
Registriert: 13.06.2013
|
erstellt am: 16. Jun. 2013 16:28 <-- editieren / zitieren --> Unities abgeben:
Hi, also den Kontakt habe ich jetzt hinbekommen, allerdings kann ich in Kinematics keine Drehbewegung erzeugen, weder mit den GearJoint noch mit RollCurveJoint. Habt ihr mir da vielleicht nochmals einen Tipp? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
    
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 16. Jun. 2013 17:58 <-- editieren / zitieren --> Unities abgeben: Nur für mt151187
Servus Bitte Systeminfo ausfüllen. AFAIR musst du für beide Verbindungen zunächst eine Rotatonsverbindung für die Zahnräder erstellen und dann erst de Rollkurven bzw Zahradverbindung (siehe ach Doku und Forensuche im DMU-Kinematik-Forum)). Gruß
Bernd
------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|